

Принципиальная схема регулятора
Для технической
реализации регулятора необходимо
использовать операционные усилители.
В рассмотренном примере для передаточной
функции регулятора вида
 одна из возможных принципиальных схем
будет иметь вид, представленный на рис.
8.
одна из возможных принципиальных схем
будет иметь вид, представленный на рис.
8.

Рис. 8 Принципиальная схема регулятора положения
Параметры схемы определяются из соотношений:


 1,8
1,8




Оценка качества спроектированной системы.
Оценка качества системы осуществляется методом моделирования на персональном компьютере в лаборатории института. Для самостоятельного решения задачи возможно использование готовых программных продуктов (МВТУ, Simulink, MATRIX, VisSim и др.).
Необходимо провести исследование системы, в процессе которого необходимо:
1) ответить на вопрос «Обеспечивает ли спроектированная система заданное значение критерия качества (точность) и ограничениям (время переходного процесса, перерегулирование)?
2) Построить зависимости точности следящей системы, быстродействия (времени переходного процесса), перерегулирования от коэффициента передачи регулятора.
3) Определить допустимый диапазон изменения коэффициента усиления регулятора, в котором выполняются все заданные требования и ограничения.
При оценке точности на входе формируется эквивалентное гармоническое воздействие Хвх(t) = Аэ Sin(ωэt), где Аэ = ω2max/εmax , ωэ= εmax/ ωmax(см. конспект). При оценке параметров переходного процесса (времени переходного процесса и перерегулирования) на вход системы задаётся ступенчатое воздействие вида 1(t).
Схема моделирования представлена на рис. 9.
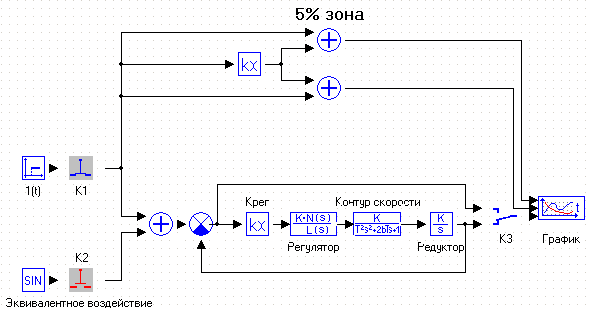
Рис. 9 Схема моделирования следящей системы в ПК МВТУ
В результате исследования необходимо определить допустимый диапазон изменения коэффициента передачи регулятора. При исследовании определяются: максимальная ошибка Q ( в этом режиме ключ К1 разомкнут, К2 замкнут, К3 в верхнем положении) ; время переходного процессаtпп; перерегулированиеσ(в этом режиме ключ К1 замкнут, К2 разомкнут, К3 в нижнем положении). Рекомендуемые настройки окна «Параметры счета»: Рунге-Кутта 45; «Время интегрир.» 1с; «Минимальный шаг интегрирования» 1е-10; «Максимальный шаг» 0,001; «Шаг вывода результатов» 0,001; «Относительная точность» 0,01.
Форма 1
|
K рег |
300 |
600 |
900 |
1200 |
1500 |
1800 |
2100 |
2400 |
2700 |
|
t пп |
1,1 |
0,71 |
0,52 |
0,4 |
0,31 |
0,24 |
0,21 |
0,2 |
0,2 |
|
t пп1 |
3,5 |
2,2 |
1,7 |
1,3 |
1 |
0,77 |
0,68 |
0,65 |
0,65 |
|
σ |
19 |
14 |
12 |
10 |
10 |
15 |
21 |
25 |
32 |
|
σ1 |
0,76 |
0,56 |
0,48 |
0,4 |
0,4 |
0,6 |
0,84 |
1 |
1,28 |
|
Q |
0,029 |
0,014 |
0,0095 |
0,007 |
0,0057 |
0,0048 |
0,0041 |
0,0034 |
0,0031 |
|
Q1 |
1,27 |
0,61 |
0,42 |
0,3 |
0,25 |
0,2 |
0,18 |
0,15 |
0,14 |

Рис.10 результаты исследования.
Вывод.
При расчетном Крегисследуемая система не удовлетворяет условиям по ограничениям (tпп). В результате моделирования определяем оптимальныйКрег, который лежит в диапазоне 1500… 2400.