

Л2-3. Классификация сельскохозяйственных электроприводов по приводным характеристикам и режимам работы.
Электропривод применяют в различных областях сельского хозяйства, а также во вспомогательных производствах, в том числе по обслуживанию и ремонту с/Х техники, по первичной переработке разнообразной продукции. Наиболее широко его используют в стационарных процессах производства (животноводство, птицеводство). Именно в последних отраслях электропривод имеет наиболее высокий уровень автоматизации в системах отопления и вентиляции, водоснабжения, приготовления и раздачи кормов.
В растениеводстве электропривод применяют в установках по очистке, сушке, сортировке зерна, при переработке и хранении картофеля и плодоовощной продукции. В теплицах и оранжереях ЭП используют в системах обеспечения микроклимата помещений по выращиванию растений для привода различных машин и механизмов для обработки почвы, в системах полива и подкормки растений. Применяют электропривод для привода технологических установок подсобных предприятий и производственного агропромышленного сектора (в составе установок производства строительных материалов (пиломатериала, кирпича, бетона), а также в составе станочного оборудования ремонтных предприятий и мастерских.
Многочисленные технологически установки осуществляют в большинстве случаев однотипные технологические функции: водоснабжение, вентиляции, транспортирования, дробления, смешивания. Поэтому при рассмотрении ЭП сельхозмашин, механизмов и установок целесообразно структурировать их по характерным признаком.
По назначению и конструктивным особенностям рабочих органов, по основным приводным характеристикам и режимам работы электроприводные машины и механизмы, используемые в сельском хозяйстве условно подразделяют на 8 характерных групп:
Центробежные механизмы
Грузоподъёмные механизмы циклического действия
Механизмы непрерывного транспорта
Установки с кривошипно-шатунным механизмом
Машины и установки первичной обработки продукции
Мобильные и машинные установки
Станочное оборудование
Ручной инструмент
1.Центробежные механизмы.
К группе электроприводных центробежных механизмов относят: различные центробежные насосы и вентиляторы, центрифуги, молочные сепараторы, ротационные вакуум-насосы, центробежные пневматические транспортёры.
Характерные особенности центробежных механических ЭП:
Вентиляторная или близкая к ней механическая характеристика
Методы регулирования производительности (подачи) и инерционные характеристики.
Режимы работы и особенности автоматизации
2.Грузоподъемные механизмы циклического действия (лебедки, тельферы, кран-балки, краны и экскаваторы с ЭП).
Характерные особенности ЭП грузоподъемных механизмов циклического действия:
наличие независимого от скорости (однонаправленного) момента статической нагрузки на валу электродвигателя привода подъема – опускания груза и соответственно оснащение ЭП механическими тормозными средствами.
Ограниченность области применения груза и соответственно оснащения системы управления путевыми (конечными) выключателями.
необходимость ограничения ускорений механизма и получение максимальных скоростей перемещения в том числе при нагрузках, близких к номинальной.
Малая инерционность ЭП
Разнообразие режимов работы и использования толчковых схем управления ЭП.
3.Механизмы непрерывного транспорта.
Особенности (ЭП конвейеров, транспортеров, поточно-транспортных линий)
наличие замкнутого тягового органа или непрерывная подача груза
относительно высокий момент трогания, особенно с нагрузкой.
Слабопеременная или переменная нагрузка не зависящая от скорости перемещения грузопотока
Малая инерционность привода
Взаимосвязанность отдельных приводов
4.Установки с кривошипно-шатунном механизмом (поршневые насосы, компрессоры, пильные рамы, прессы, штамповочные установки.
Особенности ЭП с кривошипно-шатунным механизмом
Переменный момент инерции
Затрудненные условия пуска (связанные не только со значением нагрузки при пуске, но и с положением шатуна относительно оси вращения кривошипа)
Необходимость применения дополнительных маховых масс и ЭД с мягкой механической характеристикой.
5. Машины и установки первичной продукции (технологические агрегаты и установки с ЭП)
Особенности:
Большое разнообразие нагрузок случайно-переменного характера
Наличие нескольких рабочих органов в одном агрегате
Необходимость в ручном или автоматическом регулировании загрузки
6. Мобильные машины и установки (мобильные раздатчики кормов, электротранспорт внутрицеховой – электрокары, электромобили, электропогрузчики).
Особенности ЭП мобильных установок и машин:
Способ электропитания (централизованный или автономный)
Вид электропитания (кабельный, троллейный, аккумуляторный, конденсаторный, электротрансмиссия)
Необходимость реверсирования и регулирования скорости движения
Большой диапазон неоднозначных нагрузок
7.Станочное оборудование. Специализированное станочное оборудования с ЭП используют в метало и деревообрабатывающих мастерских и на вспомогательных производствах.
Особенности:
Большое разнообразие режимов работы ЭП по нагрузке
Использование контактного унифицированного электрооборудования
Строгое поддержание заданного технологического процесса
8. Ручной инструмент (стриг. машины, садовый электроинструмент, инструмент по уходу за овощными культурами (дисковые и другие ножницы)). Электродрели, режущие и шлифовальные электромашины, электропилы, электрорубанки, фрезеры и др.
Особенности:
Повышенная опасность поражения электротоком и ухудшенные условия охлаждения из за нахождения в руках работника
Не однозначность нагрузок и режимов работы, определяемых квалификацией и физическими данными работающего
Широкий диапазон возможных условий окружающей среды.
Следует рассматривать ЭП, используемые в с/х. именно по приводным характеристикам и особенно работы, т.к. это позволяет выделить наиболее существенное свойство ЭП каждой группы.
На рис 6 показана схема реверсивного управления АД с фазным ротором в функции времени с помощью командоконтроллера.
Функция времени осуществляется маятниковыми реле времени, встроенными в соответствующие контакторы. Торможения двигателя при реверсе производится противовключением и осуществляется в функции тока. Защита двигателя от К3 выполнена на реле максимального тока РМ1 и РМ2, от перегрузки – на тепловых реле РТ1 и РТ2, и от повышения напряжения сети-с помощью реле напряжения РН
Рис. 6
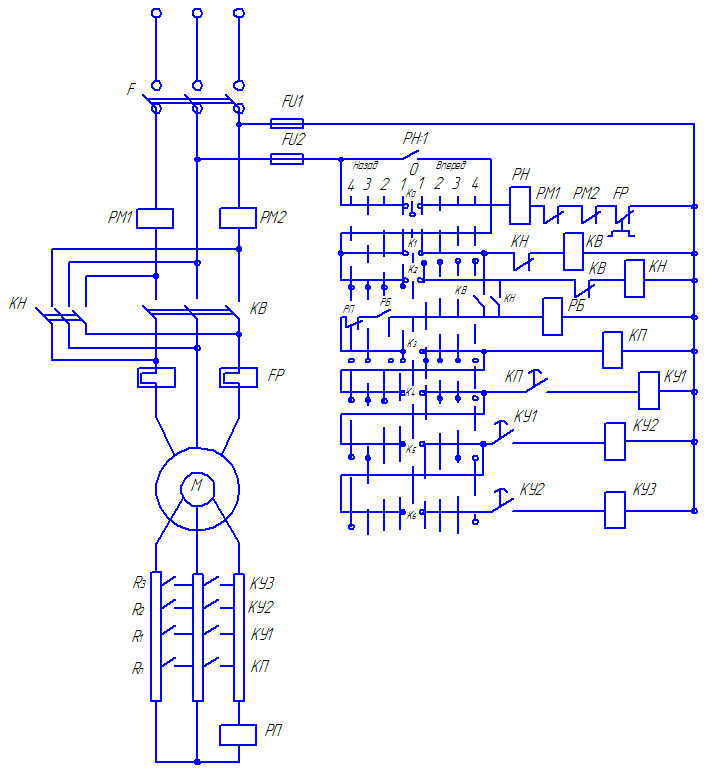
Кроме того, реле РН делает возможным повторный пуск только после установки командоконтроллера в нулевое положение. Это исключает возможность пуска двигателя с выведенным сопротивлением.
Подача напряжения на схему при нулевом положении командоконтроллера приводит к срабатыванию реле РН1, т.к. контакт К0 будет закрыт. Контакт РН зашунтирует контакт К0, и перевод командоконтроллера из нулевого положения не приведет к отключению реле РН1 через контакт которого получают питание остальные элементы схемы управления.
Перевод ручки контроллера в положение 1 (вперед) приводит к закрыванию контактов контроллера К1 и К3, выключается контактор КВ и подает напряжение на статор двигателя. Одновременно блок-контакт КВ подаст напряжение на блокировочное реле РБ, которое в свою очередь через закрытые контакты РП и К3 включает контактор противовключения КП1 и ступень противовключения Rп будет зашунтирована. Двигатель начнет разгоняться на первой реостатной характеристики. Контакт токового реле противовключения РП будет закрыт, т.к. ток срабатывания реле выбирается выше пускового тока и оно реагирует только на ток, возникающий в роторе при противовключении.
Если командоконтроллер не был переведен в следующее положение, то маятниковый механизм контактора противовключения КП с выдержкой времени закроет блок-контакт КП и подготовит к включению цепь контактора КУ1. Перевод командоконтроллера во второе положение закроет контакт К4; включается контактор КУ1, который зашунтирует первую ступень регулировочного реостата, и двигатель выйдет на вторую реостатную характеристику. Переключение на следующие характеристики, в том числе и на естественную, происходит аналогично. Если необходимо быстро вывести двигатель на естественную характеристику, то командоконтроллер переводится из нулевого положение в четвертое. При этом контакты контроллера К4, К5 и К6 замкнутся сразу же после замыкания контактов К1 и К3. Цепи катушек контакторов ускорения КУ1, КУ2 и КУ3 будут подготовлены к включению и контакторы начнут последовательно включаться с выдержкой времени, создаваемой маятниковыми механизмами блок-контактов в КП1,КУ1 и КУ2 двигатель автоматически выйдет на естественную характеристику. Реверсирование двигателя производится переводом командоконтроллера из положения «вперед» в положение «назад», при переходе командоконтроллером нулевого положения отключается вся аппаратура управления.
Переход за нулевое положение (в сторону «назад») сопровождается включением контактора КН, который меняет чередование фаз на статоре двигателя. При этом в роторной цепи будет протекать ток противовключения, который по величине будет больше пускового тока, и реле РП, сработав, разомкнет свой контакт РП. Это произойдет раньше, чем блокировочное реле РБ закроет свой контакт РБ, так как его соответственное время срабатывания выбирается выше времени срабатывания РП. Если бы в схеме отсутствовало реле РБ, то после включения контактора КН катушка контактора КП получила бы кратковременное питание – до момента срабатывания реле РП1 и ступень противовключения на это время была бы зашунтирована, что не допустимо. Ток в роторе при торможении контролирует реле РП, которое не дает вывести ступень противовключения, пока ток не снизится до допустимой при пуске величины. Это произойдет при скорости двигателя близкой к нулю. Как только ток упадет до допустимой величины, реле РП отпустит свой якорь, закроет свой контакт РП и включит контактор КП, который выведет ступень противовключения.
Последующий пуск двигателя в направлении «назад» протекает так же, как и при переводе командоконтроллера в направлении «вперед».
Остановка двигателя выполняется переводом командоконтроллера в нулевое положение.
При срабатывании какого-либо реле защиты разрывается цепь питания реле РН, контакт РН открывается и снимает питание с элементов схемы правления. Двигатель отключается от сети.
Управление пуском функции скорости требует наличие устройства, контролирующего скорость вращения электродвигателя. В качестве такого устройства может быть использован тахогенератор, соединенный с валом двигателя. Однако это усложняет схему, по этому фиксирование других параметров, однозначно связанных со скоростью. У двигателей постоянного тока – это ЭДС якоря, а для АД с фазным ротором – частота тока роторной цепи возможная реализация: ставятся промежуточные частотные реле, уставки которых настраиваются по выражению
Любой
скорости ротора
 ,
при которой должно произойти отключение
определенной ступени пускового реостата,
соответствует определенная частота
,
при которой должно произойти отключение
определенной ступени пускового реостата,
соответствует определенная частота .
Применение реле частоты, включаемых в
цепь ротора АД, позволяет осуществить
своевременное выключение ступеней
пускового реостата. Уставка срабатывания
реле частоты могут быть определены по
выражению
.
Применение реле частоты, включаемых в
цепь ротора АД, позволяет осуществить
своевременное выключение ступеней
пускового реостата. Уставка срабатывания
реле частоты могут быть определены по
выражению
Путем
подстановки в него скорости
 равной
скорости переключения
равной
скорости переключения .
.
Сначала по заданным паспортным данным двигателя и пусковому или максимальному моменту рассчитывают величины пусковых сопротивлений (согласно рассмотренных ранее методик), далее строят естественные и реостатные механические характеристики двигателя.
Л3-4 .Рассмотрим первую группу с.х. электроприводов – центробежные механизмы.
1 Молокоочистители и сепараторы.
Принцип их работы основан на использовании центробежной силы, под действием которой происходит разделение молока на фракции с разной плотностью и отделение механических примесей. ЭП сепараторов имеет ряд специфических особенностей. При работе сепараторов не требуется регулирования скорости. В то же время отклонение рабочей скости от расчетной приводит к ухудшению процесса разделения. По этому для привода сепаратора необходимо применять двигатели с жесткой механической характеристикой. Наиболее рациональным является привод сепаратора с асинхронным КЗ двигателем.
Теоретически механическая характеристика сепаратора описывается уравнением параболы:
Где
 -момент сопротивления при вращения
барабана, нм
-момент сопротивления при вращения
барабана, нм
 -
начальный момент
трогания барабана,
нм
-
начальный момент
трогания барабана,
нм
 -угловая
скорость барабана, рад/с
-угловая
скорость барабана, рад/с
Для центрифуг с производительностью 50 – 1000 л/ч , а= 1,78*10-6 Нмс2
 -
коэффициент пропорциональности, нмс2
-
коэффициент пропорциональности, нмс2
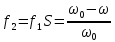
Практическая механическая характеристика имеет отличие от теоретической.
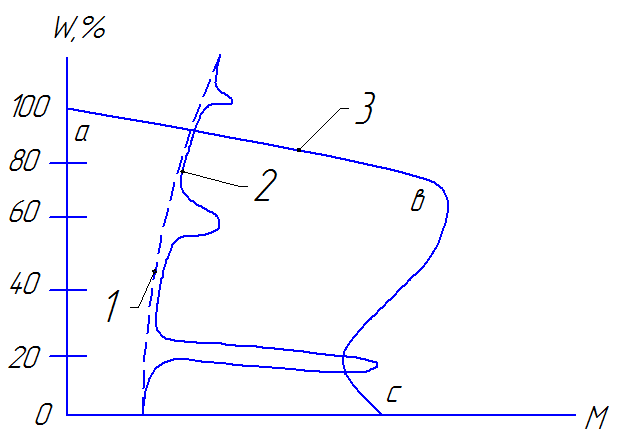
Теоретическая
Практическая характеристика сепаратора.
Характеристика двигателя
Механическая характеристика сепаратора приводного АД.
Практическая
механическая характеристика имеет
отличие от теоретической. Это связано
с появлением на кривой
 резонансных всплесков моментов, вызванных
неточностью балансировки барабана и
наличием люфта в винтовой передаче.
Наибольшую величину имеет первый
резонансный всплеск, появляющийся в
начале разгона барабана. При неблагоприятных
условиях величина этого всплеска может
быть настолько большой, что не исключена
возможность пересечения механической
характеристики сепаратора (2) с механической
характеристикой АД3, которая при этих
скоростях имеет провал. В этом случае
возможно длительная работа сепаратора
в районе резонанса, которая может
привести к его механическому повреждению.
Также недопустима работа сепаратора в
районе второго или третьего резонанса,
т.к. ухудшается качество разделения и
наблюдается повышенный износ деталей.
резонансных всплесков моментов, вызванных
неточностью балансировки барабана и
наличием люфта в винтовой передаче.
Наибольшую величину имеет первый
резонансный всплеск, появляющийся в
начале разгона барабана. При неблагоприятных
условиях величина этого всплеска может
быть настолько большой, что не исключена
возможность пересечения механической
характеристики сепаратора (2) с механической
характеристикой АД3, которая при этих
скоростях имеет провал. В этом случае
возможно длительная работа сепаратора
в районе резонанса, которая может
привести к его механическому повреждению.
Также недопустима работа сепаратора в
районе второго или третьего резонанса,
т.к. ухудшается качество разделения и
наблюдается повышенный износ деталей.
Следующая особенность ЭП сепаратора заключается в том, что рабочие скорости барабана весьма высоки (до 10000 мин-1 ) и в следствие наличии повышающего редуктора приведенный к валу двигателя момент инерции барабана имеет значительную величину. Это обуславливает большую продолжительность пуска. Разгон сепараторов производительностью 0,1 – 0,5 т/ч длится 100 – 180 с.
Асинхронный двигатель работая на пусковой части механической характеристики 3 (участок вс.), перегревается и может выйти из строя, поэтому при выборе мощности ЭД привода сепаратора основным режимом является пусковой. Для снижения потерь в АД при пуске сепаратор соединяется с двигателем через центробежную фрикционную муфту скольжения. При такой конструкции ЭП за счет проскальзывания полумуфт двигатель разгоняется до выхода на рабочую часть механической характеристики (участок ав) почти вхолостую и за короткий промежуток времени.
По мимо снижения потерь в двигателе фрикционная муфта обеспечивает плавный разгон барабана сепаратора, снижая динамические нагрузки в передачи и исключает возможность длительной работы в районе первого резонансного всплеска. Пускать сепаратор необходимо вхолостую режим работы электродвигателя длительный, с постоянной мощностью на валу. Величина мощности может быть подсчитана по формуле:


Где с – опытный коэффициент, который учитывает мощность, идущую на сообщение кинетической энергии жидкости, поступающей в барабан. (например, для сепаратора «Урал-6» с=1,5, для сепаратора «СПМФ-2000, с=1,2).
Для
сепараторов с производительностью до
3 т/ч при расчетах мощности можно принять
 ;
а=2
;
а=2 10-6
Нмс2
.
10-6
Нмс2
.
Перспективным направлением в развитии электропривода сепараторов следует считать замену центробежной муфты на электромагнитную порошковую муфту, т.к. у центробежных муфт фрикционные колодки нередко «залипают» в начале пуска двигателя, и дальнейший разгон происходит как при прямом соединении валов двигателя и сепаратора. Это приводит к выходу двигателя из строя. Электромагнитные муфты свободны от такого недостатка и благодаря возможности регулирования момента позволяют настроить пуск на оптимальный режим.
Ведутся работы по созданию высокоскоростного ЭП с высокочастотным (200-400 Гц) АД, соединенным непосредственно с валом барабана. При этом снизятся резонансные всплески на механической характеристике сепараторов вследствие отсутствия винтовой пары редуктора.
2) Электропривод установок для водоснабжения и орошения.
Выбор электродвигателя насосных установок.
Для водоснабжения и орошения используются различные типы насосов, но наибольшее распространение получили центробежные насосы.
Мощность, необходимая для привода насоса, определяется:

Где
Q
– производительность насоса,

 -
удельный вес воды, равный 9810
-
удельный вес воды, равный 9810
 (9,81
(9,81 )
)
Н – полный рассчитанный напор, м
 -
КПД насоса (0,4-0,8)
-
КПД насоса (0,4-0,8)
 -
КПД передачи (обычно ц/б насос соединяется
непосредственно с ЭД через электрическую
муфту, КПД которой 0,98-0,99)
-
КПД передачи (обычно ц/б насос соединяется
непосредственно с ЭД через электрическую
муфту, КПД которой 0,98-0,99)
Производительность насоса определяется по средствам нормам водоснабжения из соотношения:
 ,
,
пожарный расход 2,5-10 л/с t = 2-3 часа
Где
 - максимальная расчётная потребность
воды,
- максимальная расчётная потребность
воды,
 -
среднесуточный расход воды,
-
среднесуточный расход воды,
 (определяется по нормам потребления)
(определяется по нормам потребления)
 -
коэффициент суточной неравномерности
водопотребления (1,2-1,3) (1,1-1,3)
-
коэффициент суточной неравномерности
водопотребления (1,2-1,3) (1,1-1,3)
 -
коэффициент часовой неравномерности
водоснабжения (
-
коэффициент часовой неравномерности
водоснабжения ( - на ферме с автопоением,
- на ферме с автопоением, на ферме без автопоения), для посёлка
1,5-2,5
на ферме без автопоения), для посёлка
1,5-2,5
 -
коэффициент для потерь воды,
-
коэффициент для потерь воды,
 .
.
Среднесуточное потребление воды:
 ,
,
Где
 – суточная норма потребления воды одним
видом потребителей,
– суточная норма потребления воды одним
видом потребителей,
 –количество
потребителей каждого вида
–количество
потребителей каждого вида
Напор насоса выбирают таким, чтобы можно было подать воду при необходимом давлении в заданную точку.
Определяется:
 ,
,
Где
 – высота всасывания, т.е. расстояние по
вертикали от уровня воды в источнике
до оси насоса, м
– высота всасывания, т.е. расстояние по
вертикали от уровня воды в источнике
до оси насоса, м
 -
высота нагнетания, расстояние по
вертикали от оси насоса до самой высокой
точки подачи воды, м
-
высота нагнетания, расстояние по
вертикали от оси насоса до самой высокой
точки подачи воды, м
 -
потери напора в магистрали, м
-
потери напора в магистрали, м
 -
свободный напор, обеспечивающий выход
воды к потребителю с определённой
скоростью, м (зная расход и напор по
таблицам выбирают насос).
-
свободный напор, обеспечивающий выход
воды к потребителю с определённой
скоростью, м (зная расход и напор по
таблицам выбирают насос).
Электропривод насосных установок осуществляют асинхронными короткозамкнутыми двигателями. Системы водоснабжения строятся, как правило, по схеме насос-водонапорный бак или воздушно-водяной котёл – напорный трубопровод. Водонапорный бак или котёл воспринимают разность расходов насоса и потребителей и выравнивают давление воды у потребителей.
Для выравнивания режима работы электродвигателя рассмотрим работу насосной установки, гидравлическая схема которой показана на рисунке:
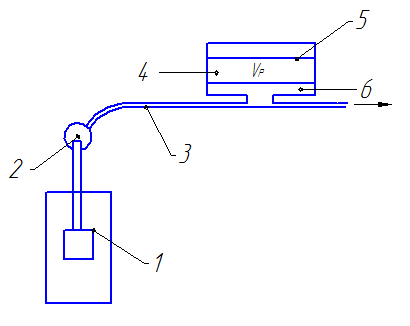
Источник воды
Насос
Водопровод к потребителю
Водонапорный бак или котёл
Верхний уровень воды
Нижний уровень воды
При
включённом насосе будет поступать к
потребителям и в водонапорный бак или
котёл, заполняя регулируемый объём
 .
Как только бак заполнится, насос
отключается и потребители получают
воду из регулируемого объёма бака.
.
Как только бак заполнится, насос
отключается и потребители получают
воду из регулируемого объёма бака.
При
достижении нижнего уровня в баке насос
снова включается. Таким образом, работа
насоса происходит циклично. Поскольку
потребление воды в течение суток
меняется, будет изменяться и частота
включения насосов. Максимальная частота
включения насоса
 наблюдается при расходе воды потребителю
наблюдается при расходе воды потребителю и зависит от регулируемого объёма:
и зависит от регулируемого объёма:
 ,
,
Где
Q
– производительность насоса,

В
системе с водонапорным баком регулируемый
объём велик и
 .
Электродвигатель выбирают по длительному
режиму работы. Мощность его определяют
по формуле, приведённой выше. В системе
с котлом регулируемый объём мал и
.
Электродвигатель выбирают по длительному
режиму работы. Мощность его определяют
по формуле, приведённой выше. В системе
с котлом регулируемый объём мал и ,
режим работы двигателя будет
повторно-кратковременным. Однако в
таких системах возможен и длительный
режим работы электродвигателя при
,
режим работы двигателя будет
повторно-кратковременным. Однако в
таких системах возможен и длительный
режим работы электродвигателя при .
Поэтому обычно электродвигатель
выбирается также для условий длительного
режима, но при этом обязательно делается
проверка его на допустимое число
включений в час, то следует увеличить
регулируемый объём
.
Поэтому обычно электродвигатель
выбирается также для условий длительного
режима, но при этом обязательно делается
проверка его на допустимое число
включений в час, то следует увеличить
регулируемый объём .
.
Автоматическое управление насосными станциями с воздушно-водяным котлом осуществляется с помощью реле давления, реагирующего на давление воздуха внутри котла.
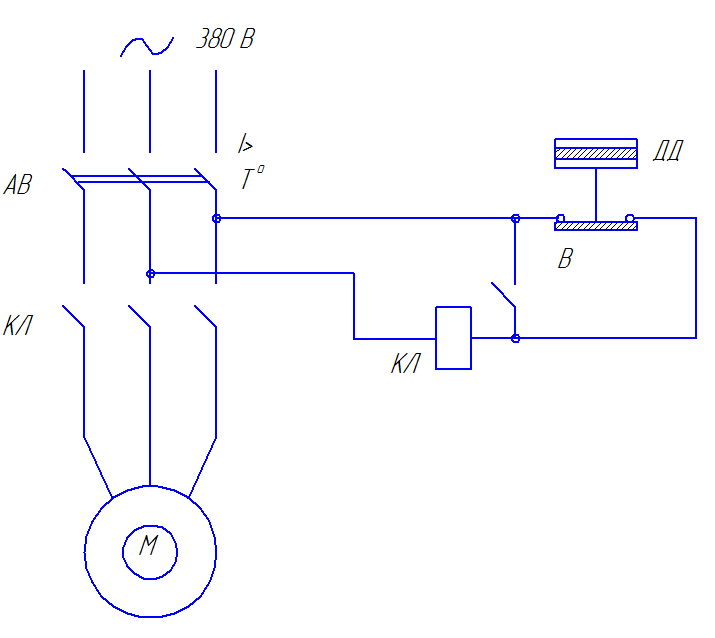
Схема управления автоматической насосной станцией с воздухо-водонасосным котлом типа ВУ.
Для пуска станции включают автомат АВ. При отсутствии воды в котле контакты реле давления ДД будут закрыты и включится магнитный пускатель КЛ. Двигатель запуститься, насосныйагрегат будет подавать воду в сеть, а её излишки пойдёт в котёл. При повышении уровня воды в герметично закрытом котле будет повышать давление воздуха. Когда вода достигнет верхнего уровня, давление воздуха станет равным установке реле ДД, его контакты разомкнуться, и насос выключится. Вода, запасённая в котле под давлением сжатого воздуха, пойдёт к потребителю. Новое включение насоса произойдёт при опускании воды в котле до нижнего уровня, когда контакты ДД снова закроются. Выключателем В осуществляется ручное управление насосом.
3) Электропривод вентиляционных установок. Расчёт вентиляционной установки.
В помещениях без вентиляции продуктивность животных снижается. Для расчёта вентиляционной установки животноводческих и птицеводческих помещений необходимо определить количество воздуха, которое вентилятор должен удалить из помещения или подать в него за единицу времени. Часовой расход воздуха L в расчёте на одну голову и на один источник выделений вредностей может быть определён:
 ,
,
где z – число единиц вредностей, выделяемых в помещении в единицу времени;
 -
содержание единиц вредностей в 1
-
содержание единиц вредностей в 1
 наружного воздуха;
наружного воздуха;
 -
содержание
единиц вредностей в 1
-
содержание
единиц вредностей в 1
 воздуха, удаляемого из помещения.
воздуха, удаляемого из помещения.
По этой формуле можно определить расход воздуха на удаление избыточной влаги, углекислоты, тепла. В зависимости от этого написанные формулы будут несколько изменяться. При расчёте воздуха на удаление избыточной влаги она имеет вид:
 ,
,
Где
 выделение влаги внутри помещения, г/ч;
выделение влаги внутри помещения, г/ч;
 -
влага,
выделяемая дыханием и кожей животных
(например, дойные коровы в зависимости
от веса могут выделить влаги 250-350 г/ч,
свиньи – 75-100 г/ч, лошади – 270-330 г/ч, куры
7,7-10 г/ч).
-
влага,
выделяемая дыханием и кожей животных
(например, дойные коровы в зависимости
от веса могут выделить влаги 250-350 г/ч,
свиньи – 75-100 г/ч, лошади – 270-330 г/ч, куры
7,7-10 г/ч).
 –влага,
испаряющаяся с пола и из кормушек, г/ч
–влага,
испаряющаяся с пола и из кормушек, г/ч
 ,
,
 –
содержание влаги в наружном и воздухе
и в воздухе внутри помещения, г/
–
содержание влаги в наружном и воздухе
и в воздухе внутри помещения, г/
 и
и
 - содержание влаги в наружном воздухе
и внутри помещения в насыщенном состоянии,
г/
- содержание влаги в наружном воздухе
и внутри помещения в насыщенном состоянии,
г/
 и
и
 – относительная влажность наружного
воздуха и воздуха внутри помещения.
– относительная влажность наружного
воздуха и воздуха внутри помещения.
В
не отапливаемых помещениях при t воздуха
от 6 до
 С
относительная влажность воздуха не
должна превышать 85%, а в отапливаемых
помещениях при
С
относительная влажность воздуха не
должна превышать 85%, а в отапливаемых
помещениях при
Расход воздуха на удаление избыточного количества углекислого газа:
 ,
,
Где
 - выделяемое животными количество
углекислого газа на 1 кг живого веса
- выделяемое животными количество
углекислого газа на 1 кг живого веса
(коровы
выделяют 380-420
 ,
лошади – 240-270
,
лошади – 240-270 ,
свиньи – 336
,
свиньи – 336 ,
пуреи – 1700-2000
,
пуреи – 1700-2000 )
)
 - содержание CO2
в наружном
воздухе (сельская местность 300
- содержание CO2
в наружном
воздухе (сельская местность 300 ,
город – 400
,
город – 400 )
)
 -
допустимое содержание CO2
в воздухе
внутри помещения (не должно превышать
2500-3000
-
допустимое содержание CO2
в воздухе
внутри помещения (не должно превышать
2500-3000
 )
)
Коэффициент 1,2 учитывает выделение углекислого газа микроорганизмами, подстилкой и пр.
Расчёт расхода воздуха на удаление аммиака обычно не производится, т.к. расчёт вентиляционной нормы по углекислоте удовлетворяет требованиям по удалению аммиака.
Расход воздуха на удаление избыточного тепла:
 ,
,
Где
 - излишнее тепло, выделяемое животными
ккал/ч
- излишнее тепло, выделяемое животными
ккал/ч
 -
температурный коэффициент
-
температурный коэффициент
 -
теплоёмкость 1
-
теплоёмкость 1
 воздуха (0,31 ккал/
воздуха (0,31 ккал/ град при
град при С
и нормальном давлении)
С
и нормальном давлении)
 -
температура воздуха внутри помещения,
-
температура воздуха внутри помещения,

Выбрав из приведённых расчётов наибольший расход воздуха на одну голову, определяют производительность вентиляционной установки:
 ,
,
Где N – количество голов в помещении, L – вентиляционная норма.
Гигиеническими
органами установлена допустимая для
воздухообмена, которая лежит в пределах
 (для коровников
(для коровников ,
к =4,
,
к =4, к=15).
к=15).
Превышение этих норм может привести к простуживанию животных. Поэтому после расчета производительности вентиляционной установки следует определить получаемую кратность воздухообмена и сравнить ее с допустимой:

Где V – объем вентилируемого помещения, м3
Для выбора вентилятора помимо производительности необходимо знать потери напора воздухораспределительных трубопроводов при рассчитанном расходе воздуха.
Расчет необходимого напора Н вентилятора
 ;
;
Где
 динамический или скоростной напор,
который обеспечивает необходимую
скорость перемещения воздуха, кгс/м2
динамический или скоростной напор,
который обеспечивает необходимую
скорость перемещения воздуха, кгс/м2
 –статический
напор, который определяется сопротивлением
передвижению воздуха в трубопроводах,
кгс/м2
–статический
напор, который определяется сопротивлением
передвижению воздуха в трубопроводах,
кгс/м2
Расчет составляющих напоров приводятся в справочной литературе по отоплению к вентиляции.
В вентиляционных системах с/х как правило, применяются вентиляторы низкого и среднего давления. Для централизованной вентиляции (одна установка с трубопроводами) устанавливается центробежные вентиляторы (рекомендуются Ц4-70, Ц9-55)
Вытяжная вентиляционная установка может быть рассредоточенной. В этом случае загрязненный воздух удаляется из помещения несколькими небольшими вентиляторами, устанавливаемыми не посредственно в вытяжных каналах и шахтах. Здесь целесообразно установить вентиляторы типа МЦ, ВО и крышные вентиляторы КЦ3-90, КС4-84.
Для привода вентиляторов наиболее подходящими следует считать АД с К.З. ротором, закрытого исполнения, с противосыворотной и противоаммиачной изоляции.
Условия пуска, легкие (как правило), а после пуска режима работы АД характеризуется равномерной нагрузкой.
Необходимая для привода вентилятора мощность ЭД определяется:
Где
 =1,1-1,5
–коэффициент запаса при работе с
трубопроводом (большие значения следует
выбрать при меньшей мощности ЭД)
=1,1-1,5
–коэффициент запаса при работе с
трубопроводом (большие значения следует
выбрать при меньшей мощности ЭД)
 -производительность
вентилятора, м3/ч
-производительность
вентилятора, м3/ч
 -
полный напор вентилятора, кгс/м2
-
полный напор вентилятора, кгс/м2
 -
КПД вентилятора
(
-
КПД вентилятора
( для
вентиляторов большой производительности
и (
для
вентиляторов большой производительности
и ( )
для малой производительности.
)
для малой производительности.
 -
КПД передачи.
-
КПД передачи.