

Л.5 эп подъемных и транспортирующих машин
Подъемные механизмы применяются для выполнения целого ряда погрузо-разгрузочных и монтажных работ. В электроприводах подъемных механизмов различают два вида статических нагрузок: реактивные – появляются только при движении всегда направленные против движения, и потенциальные – которые могут действовать в любой момент времени и любом направлении (по направлению и против движения). Примером реактивных нагрузок является нагрузка создаваемая силами трения в механизмах (трениях в подшипниках, трение тросов о направляющие рамки), примером активных нагрузок может служить нагрузка, зависящая от веса груза.
ЭП подъемных механизмов конструктивно выполняется таким образом, чтобы он мог воспринимать потенциальную нагрузку как при включенном, так и при остановленном ЭД. Поэтому в подъемных механизмах обязательно наличие тормозного устройства, сблокированного с электродвигателя. Конструктивно тормоза могут выполняться барабанными или дисковыми с приводом от электромагнита. При отключенном ЭД под действием пружин тормозные колодки затормаживают вал ЭД, не давая грузу опускаться. Одновременно с включением ЭД подается напряжение на электромагнит тормоза, который продолжает действие пружин и растормаживает вал ЭД.
На рисунке представлена кинематическая схема механизма подъема электротали
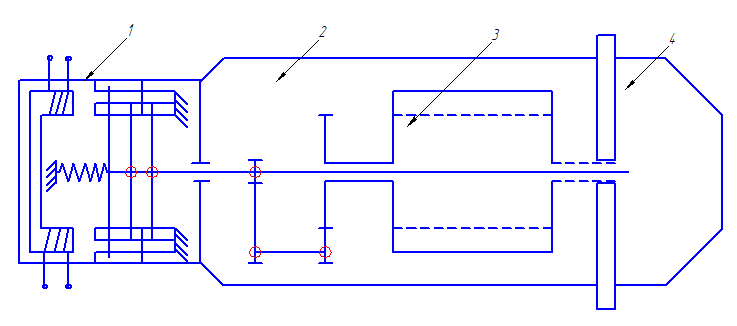
Подъемный барабан 3 приводится двигателем 4 передаточный редуктор 2. С приводным валом связаны диски электромагнитного тормоза 1
Электрическая схема управления электроталью
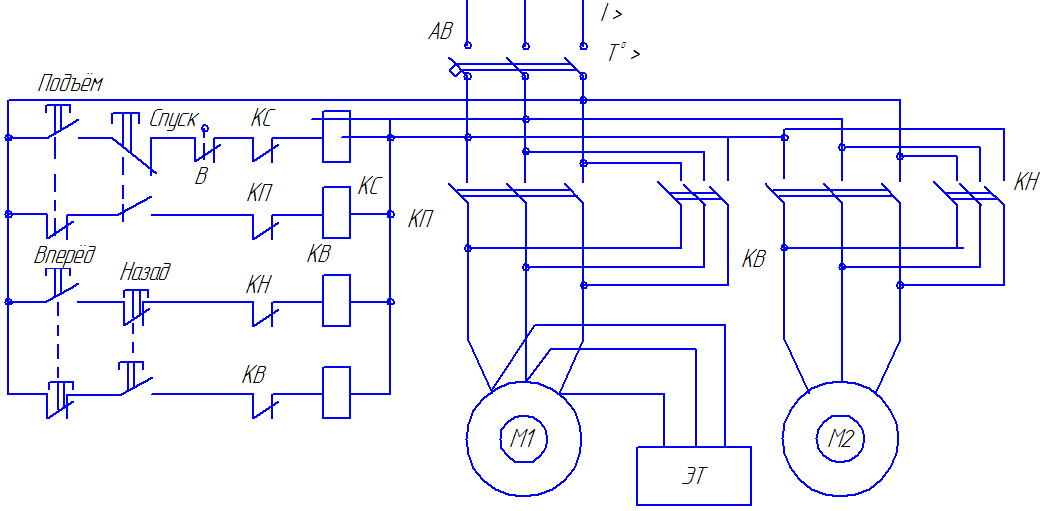
Катушки электромагнита тормоза ЭТ включается параллельно ЭД . Управление двигателем электротали осуществляется реверсивными магнитиками пускателями. Движение подъемного устройства вверх ограничивается конечным выключателем В. Блокировка контакторов от одновременного включения осуществляется двухцепными кнопками, установленными на подвесной кнопочной станции, и размыкающими контактами магнитных пускателей. Для работы двигателей необходимо держать соответствующую кнопку в нажатом состоянии.
Мощность ЭД для привода механизма подъема определяется по формуле:
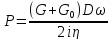
Где G- вес, поднимаемого груза, Н
 -
вес грузозахватного устройства, Н
-
вес грузозахватного устройства, Н
 –диаметр
барабана лебедки, м
–диаметр
барабана лебедки, м
 -
угловая скорость вращения ЭД, рад/с
-
угловая скорость вращения ЭД, рад/с
 -
передаточное число редуктора
-
передаточное число редуктора
 -
КПД механизма
-
КПД механизма
Мощность, необходимая для горизонтального перемещения поднятого груза по кран-балке, находятся по формуле:
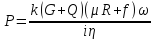
Где Q – вес передвигаемого механизма, Н
R – радиус шейки оси колеса, м
 -
коэффициент трения скольжения шейки
оси колеса в подшипнике
-
коэффициент трения скольжения шейки
оси колеса в подшипнике
 –коэффициент
трения качения колеса по кран-балке, м
–коэффициент
трения качения колеса по кран-балке, м
 –коэффициент
учитывающий трение ребер колес о
кран-балку.
–коэффициент
учитывающий трение ребер колес о
кран-балку.
 -вес
поднимаемого груза, Н
-вес
поднимаемого груза, Н
 -
передаточное число редуктора
-
передаточное число редуктора
 -
КПД механизма
-
КПД механизма
 -
угловая
скорость вращения ЭД, рад/с
-
угловая
скорость вращения ЭД, рад/с
Режим работы ЭД подъемных механизмов преимущественно повторно-кратковременный. Это необходимо учитывать при выборе типа мощности ЭД. В подъемных механизмах в основном применяются асинхронные К.З. двигатели серий АО, АОС, АОП. В подъемных устройствах большой мощности АД с фазным ротором серии АК и МТ.
Транспортные работы в животноводстве составляют примерно 30-40% всего объема затрат труда на фермах. С помощью различных типов транспортеров осуществляется раздача кормов и уборка навоза на фермах, транспортирование кормов из мест складирования в кормоцехе; в поточных линиях транспортерами осуществляется разгрузка и загрузка машин, выполняющих технологические операции. Наибольшее распространение в с/х производстве получили ленточные, скребковые, винтовые (шнеки) транспортеры и ковшовые элеваторы, т.к. в подавляющем большинстве случаев транспортеры не требуют регулирование скорости, то ЭП этих машин выполняется асинхронными К.З.двигателями закрытого исполнения.
Ленточные транспортеры перемещаются в горизонтальном и наклонном направлениях сыпучие и легкие штучные грузы. Скребковые транспортеры используются для удаления навозов из коровников.
Винтовые транспортеры (шнеки) перемещают сыпучие и мелкокусковые материалы в горизонтальном наклонном, а так же в вертикальном направлениях.
Мощность ЭД ленточного, скребкового и винтового транспортеров можно определить по формуле
Где Q – транспортера, т/ч
Коэффициент завышения мощности по условиям пуска (для ленточных 1,4; скребковых 1,8; винтовых 1,1)
h – высота подъема материала транспортером, м
l – горизонтальная проекция пути перемещения материала транспортером, м
k – общий коэффициент сопротивления перемещению (для ленточных 0,15, скребковых 2,0 винтовых при транспортировке зерна 1,85)
 -
КПД транспортера
(
-
КПД транспортера
( ≈0,8)
≈0,8)
Ковшовые элеваторы (нории)предназначены для подъема сыпучих материалов по вертикали или с небольшим отклонением от нее.
Мощность ЭД для привода элеватора подсчитывается по формуле:

КПД
 =0,4-0,7
КПД элеватора от 0,4 до 0,7.
=0,4-0,7
КПД элеватора от 0,4 до 0,7.
Режим работы транспортеров может быть различным ( длительным, повторно-кратковременным или кратковременным) в зависимости от целевого назначения транспортера в тех. Процессе. Поэтому окончательный выбор мощности ЭД следует выполнять по нагрузочным диаграммам, определяя эквивалентную мощность, с обязательной последующей проверкой двигателей и повторно—кратковременном режимах по нагрузочной способности.