

Вопрос
-
Механика, кинематика, динамика (определение, область задач).
Ответ
Механика — наука об общих законах движения тел.
Окружающие нас тела движутся сравнительно медленно. Поэтому их движения подчиняются законам Ньютона. Таким образом, область применения классической механики очень обширна. И в этой области человечество всегда будет пользоваться для описания любого движения тела законами Ньютона.
Кинематика — это раздел механики, изучающий способы описания движений и связь между величинами, характеризующими эти движения.
Описать движение тела — это значит указать способ определения его положения в пространстве в любой момент времени.
Вопрос
-
Механическое движение, тело отсчета, система отсчета, способы указания положения материальной точки на координатной плоскости, понятие кинематическое уравнение материальной точки.
Ответ
Механическим движением называется перемещение тел или частей тел в пространстве относительно друг друга с течением времени.
Тело, относительно которого рассматривается движение, называется телом отсчета.
Совокупность тела отсчета, связанной с ним системы координат и часов называют системой отсчета.
Математически
движение тела (или материальной точки)
по отношению к выбранной системе отсчёта
описывается уравнениями, которые
устанавливают, как изменяются с течением
времени t координаты, определяющие
положение тела (точки) в этой системе
отсчёта. Эти уравнения называются
уравнениями движения. Например, в
декартовых координатах х, y, z движение
точки определяется уравнениями
![]() ,
,
![]() ,
,
![]() .
.
Способы указания положения материальной точки на координатной плоскости
Задание положения точки с помощью координат. Из курса математики вы знаете, что положение точки на плоскости можно задать с помощью двух чисел, которые называются координатами этой точки. Для этого, как известно, можно на плоскости провести две пересекающиеся взаимно перпендикулярные оси, например оси ОХ и OY. Точку пересечения осей называют началом координат, а сами оси — координатными осями.
Координаты точки М1 (рис. 1.2) равны Xj = 2, ух — 4; координаты точки М2 равны х2 = -2,5, у2 = -3,5.
Положение точки М в пространстве относительно тела отсчета можно задать с помощью трех координат. Чтобы это сделать, необходимо через выбранную точку тела отсчета провести три взаимно перпендикулярные оси ОХ, OY, OZ. В полученной системе координат положение точки будет определяться тремя координатами х, у, z.
Если
число х положительно, то отрезок
откладывается в положительном направлении
оси ОХ (рис. 1.3) (х — О А). Если же число х
отрицательно, то отрезок откладывается
в отрицательном направлении оси ОХ. Из
конца этого отрезка проводят прямую,
параллельную оси OY, и на этой прямой
откладывают отрезок от оси ОХ,
соответствующий числу у (у = АВ) — в
положительном направлении оси OY, если
М число у положительно, и в отрицательном
направлении оси OY, если число у
отрицательно.
Далее из точки В другого от-У резка проводят прямую, параллельную оси OZ. На этой прямой от координатной плоскости XOY откладывают отрезок, соответствующий числу 2. Направление, рис. 1.4 в котором откладывают этот отрезок, определяют так же, как и в предыдущих случаях.
Конец третьего отрезка и есть та точка, положение которой задается координатами х, у, z.
Чтобы определить координаты данной точки, необходимо провести в обратной последовательности те операции, которые мы осуществляли, находя положение этой точки по ее координатам.
Задание
положения точки с помощью радиус-вектора.
Положение точки можно задать не только
с помощью координат, но и с помощью
радиус-вектора. Радиус-вектор — это
направленный отрезок, проведенный из
начала координат в данную точку. _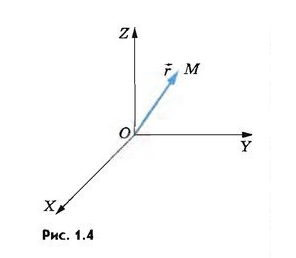
Радиус-вектор принято обозначать буквой г. Длина ра-диус-вектора, или, что одно и то же, его модуль (рис. 1.4), есть расстояние от начала координат до точки М.
Положение точки будет определено с помощью радиус-вектора только в том случае, если известны его модуль (длина) и направление в пространстве. Лишь при этом условии мы будем знать, в каком направлении от начала координат следует отложить отрезок длиной г, чтобы определить положение точки.
Итак, положение точки в пространстве определяется ее координатами или ее радиус-вектором.
Модуль
и направление любого вектора находят
по его проекциям на оси координат. Чтобы
понять, как это делается, вначале
необходимо ответить на вопрос: что
понимают под проекцией вектора на ось?
Изобразим какую-либо ось (рис. 1.5), например ось ОХ.
Опустим из начала А и конца В вектора а перпендикуляры на ось ОХ.
Точки Aj и Вj есть проекции, соответственно, начала и конца вектора а на эту ось.
Проекцией вектора а на какую-либо ось называется длина отрезка А1В1 между проекциями начала и конца вектора на эту ось, взятая со знаком «+» или «-».
Проекцию вектора мы будем обозначать той же буквой, что и вектор, но, во-первых, без стрелки над ней и, во-вторых, с индексом внизу, указывающим, на какую ось проецируется вектор. Так, ах и ау — проекции вектора а на оси координат ОХ и OY.
Согласно определению проекции вектора на ось можно записать: ах = ± I AjEJ.
Проекция вектора на ось представляет собой алгебраическую величину. Она выражается в тех же единицах, что и модуль вектора.
Условимся считать проекцию вектора на ось положительной, если от проекции начала вектора к проекции его конца надо идти в положительном направлении оси проекций. В противном случае (см. рис. 1.5) она считается отрицательной.
Из рисунков 1.5 и 1.6 нетрудно увидеть, что проекция . вектора на ось будет положительной, когда вектор составляет острый угол с направлением оси проекций, и отрицательной, когда вектор составляет с направлением оси проекций тупой угол.
Положение точки в пространстве можно задавать с помощью координат или радиус-вектора, соединяющего начало координат и точку.
СПОСОБЫ ОПИСАНИЯ ДВИЖЕНИЯ. СИСТЕМА ОТСЧЕТА
Если
тело можно считать точкой, то для описания
его движения нужно научиться рассчитывать
положение точки в любой момент времени
относительно выбранного тела отсчета.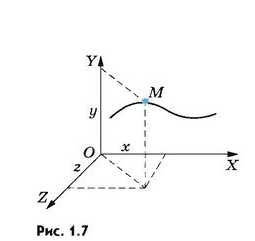
Существует несколько способов описания, или, что одно и то же, задания, движения точки. Рассмотрим два из них, которые наиболее часто применяются.
Координатный способ. Будем задавать положение точки с помощью координат (рис. 1.7). Если точка движется, то ее координаты изменяются с течением времени.
Так как координаты точки зависят от времени, то можно сказать, что они являются функциями времени. Математически это принято записывать в виде
 (1.1)
(1.1)
Уравнения (1.1) называют кинематическими уравнениями движения точки, записанными в координатной форме. Если они известны, то для каждого момента времени мы сможем рассчитать координаты точки, а следовательно, и ее положение относительно выбранного тела отсчета. Вид уравнений (1.1) для каждого конкретного движения будет вполне определенным.
Линия, по которой движется точка в пространстве, называется траекторией.
В зависимости от формы траектории все движения точки делятся на прямолинейные и криволинейные. Если траекторией является прямая линия, движение точки называется прямолинейным, а если кривая — криволинейным.
Векторный
способ. Положение точки можно задать,
как известно, и с помощью радиус-вектора.
При движении материальной точки
радиус-вектор, определяющий ее положение,
с течением времени изменяется
(поворачивается и меняет длину; рис.
1.8), т. е. является функцией времени:
r=r(t). (1.2)
Последнее уравнение есть закон движения точки, записанный в векторной форме. Если он известен, то мы можем для любого момента времени рассчитать радиус-вектор точки, а значит, определить ее положение. Таким образом, задание трех скалярных уравнений (1.1) равносильно заданию одного векторного уравнения (1.2).
Кинематические уравнения движения, записанные в координатной или векторной форме, позволяют определить положение точки в любой момент времени.
Вопрос