

М.П. Латышенко Анализ относительных движений
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение высшего профессионального образования
″КУЗБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ″
Кафедра прикладной механики
АНАЛИЗ ОТНОСИТЕЛЬНЫХ ДВИЖЕНИЙ
Методические указания к лабораторной работе по теории механизмов и машин для студентов направлений
552900, 551800, 552100 и специальностей 120100, 120200, 170100, 170500, 150200, 240100, 240400
Составители М. П. Латышенко В. Н. Ермак
Утверждены на заседании кафедры Протокол № 5 от 22.05.03
Рекомендованы к печати методической комиссией направления 552900 Протокол № 24 от 9.06.03
Электронная копия хранится в библиотеке главного корпуса ГУ КузГТУ
Кемерово 2003
1
ЦЕЛЬ И СОДЕРЖАНИЕ РАБОТЫ
Цель работы состоит в подготовке студентов к решению задач с использованием подвижных систем отсчета.
С этой целью для предложенного четырехзвенного механизма определяется вид и направление движения каждого звена относительно стойки. Для звена с плоскопараллельным движением отыскивается мгновенный центр вращения (МЦВ). Для произвольно выбранной точки каждого звена указывается направление скорости.
Такой же анализ производится относительно каждого из подвижных звеньев механизма. Работа рассчитана на 2 часа.
|
|
КРАТКИЕ СВЕДЕНИЯ ИЗ ТЕОРИИ |
|
||||||
Как известно из теоретической механики, все движения делятся на |
|||||||||
абсолютные и относительные. В теории механизмов и машин абсо- |
|||||||||
лютным считается движение относительно стойки (относительно не- |
|||||||||
подвижной системы отсчёта). Движения по отношению к любым дру- |
|||||||||
гим звеньям считаются относительными (относительно подвижной |
|||||||||
системы отсчёта). Установить вид движения звена − это значит сделать |
|||||||||
вывод, какое из трёх видов движения оно совершает: поступательное, |
|||||||||
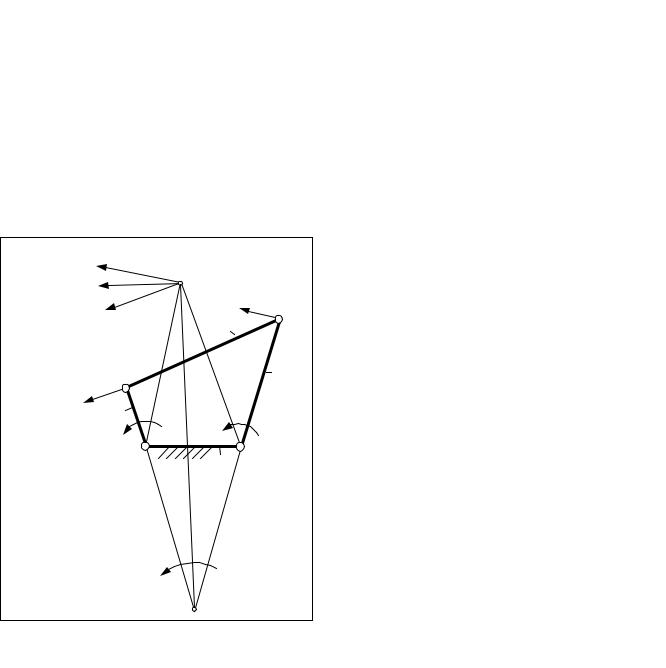
вращательное или плоскопараллельное. На рис. 1 относительно стойки |
|||||||||
vk1 AK |
|
|
|
звенья 1 и 3 совершают вращатель- |
|||||
|
К |
|
ное движение, звено 2 движется |
||||||
vk2 MK |
|
|
|||||||
|
vC |
C |
плоскопараллельно. Для звена 2 в |
||||||
vk3 DK |
точках В и С восстановлены перпен- |
||||||||
|
B |
2 |
|
дикуляры к скоростям vB и vC. В |
|||||
vB |
|
3 |
точке |
|
их |
пересечения |
находится |
||
1 |
|
|
МЦВ (М20). При анализе абсолют- |
||||||
|
|
ω3 |
ных |
и |
относительных |
движений |
|||
|
ω1 |
|
|||||||
|
|
|
приходится иметь дело не только с |
||||||
|
A |
0 |
D |
реальными точками звеньев, но и с |
|||||
|
|
|
|
воображаемыми. Чтобы представить |
|||||
|
|
|
|
их наглядно, к каждому звену мыс- |
|||||
|
|
|
|
ленно прикрепляется плоскость не- |
|||||
|
|
ω2 |
|
ограниченных |
размеров. |
Пронзив |
|||
|
|
|
разом плоскости всех звеньев в про- |
||||||
|
|
М20 |
|
||||||
|
|
|
извольном месте К (рис. 1), получа- |
||||||
|
|
Рис. 1 |
|
ют несколько одноимённых точек- |
|||||
|
|
|
|
отверстий |
К, |
принадлежащих раз- |
|||
2
ным звеньям. Точки К1, К2 и К3 принадлежат звеньям 1, 2 и 3 соответственно. Для тренировки в узнавании точек и умении мысленно следить за их движением в данной работе указывают направления скоростей vk1, vk2 и vk3 этих точек. Указанием этих скоростей анализ абсолютных движений заканчивают. Последовательность положений, которые занимает механизм на плоскости звена j , поясним на следующем примере.
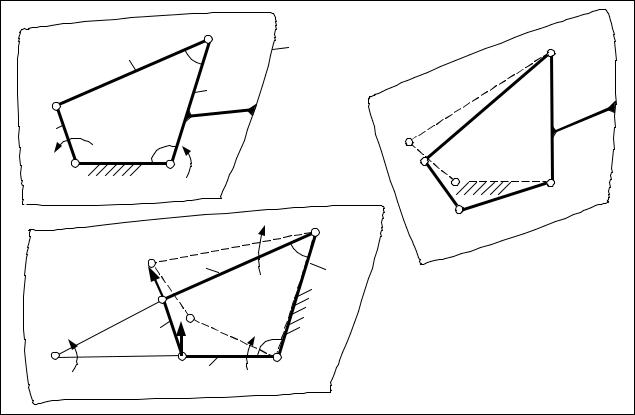
Пусть требуется определить вид и направление движения звеньев 0, 1, 2 относительно звена 3. Со звеном 3 свяжем плоскость П, расположенную поверх механизма (рис. 2,а).
|
|
2 |
C |
П |
|
|
C |
|
|
|
|
|
|||
|
|
|
|
|
|
||
B |
|
β |
3 |
|
|
|
|
|
|
а) |
|
|
|
||
1 |
|
|
|
|
|
|
|
|
α |
|
|
B′ |
|
|
|
ω1 |
|
|
ω3 |
|
B |
|
A′ |
A |
0 |
D |
|
|
|
||
|
|
C |
|
D |
|||
|
|
vB B′ |
ω2 |
|
A |
б) |
|
|
|
2 |
β |
3 |
|
|
|
|
|
B |
A′ |
|
в) |
|
|
ω1 |
|
1 |
α |
|
|
||
|
vА |
|
|
||||
|
|
|
|
||||
|
|
|
|
|
|||
М13 |
|
A |
0 ω0 |
D |
|
|
|
Рис. 2 На плоскости отметим первое положение механизма. Приведя ме-
ханизм в движение в направлении ω1 и ω3 , тут же остановим его и отметим второе положение (рис. 2,б – пунктиром). Сняв плоскость и рассмотрев на ней полученную картину (рис. 2,в), увидим, что звено 3 неподвижно; звенья 0 и 2 вращаются вокруг D и C с угловыми скоростями ω0 и ω2 соответственно. Звено 1 совершает плоскопараллельное движение, сводящееся к вращению вокруг мгновенного центра М13 с угловой скоростью ω1. Такова картина движений относительно звена 3. Исходя из рассмотренного смысла относительных движений их анализ производится следующим, более простым способом.
|
|
|
|
|
3 |
|
|
|
|
Чтобы установить характер движений относительно какого-либо |
|||||||
звена j (в данном случае−3), заданный механизм переставляется на зве- |
||||||||
но j. Перестановка означает освобождение стойки 0 и закрепление звена |
||||||||
j. |
После перестановки какому-либо звену i (0 или 2), примыкающему |
|||||||
к j, сообщается движение, допускаемое схемой. Направление этого дви- |
||||||||
жения выбирается так , чтобы естественная координата (угол α или β), |
||||||||
характеризующая положение звена i относительно j, изменялась так же , |
||||||||
как на картине абсолютных движений. В частности, на картине абсо- |
||||||||
лютных движений угол α уменьшается. Исходя из этого , ω0 на пере- |
||||||||
ставленной схеме направляют в сторону уменьшения угла α. Вид и на- |
||||||||
правление движения остальных звеньев устанавливают по переставлен- |
||||||||
ной схеме исходя из найденного направления движения звена i (в дан- |
||||||||
ном случае − 0).Такой способ определения характера относительных |
||||||||
движений называется перестановкой механизма на подвижные звенья. |
||||||||
|
|
1 vB2 |
|
|
Анализ |
относительных |
||
|
|
|
|
движений |
заканчивают указани- |
|||
|
А |
|
|
В |
ем направления скорости точки К |
|||
|
ω1 |
|
каждого из |
подвижных звеньев |
||||
|
ω2 |
|
2 |
переставленной схемы. |
||||
|
0 |
|
|
|
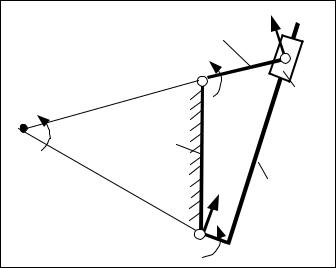
При отыскании МЦВ иногда |
|||
М20 |
|
|
|
возникает затруднение, характер- |
||||
|
|
vС2 |
3 |
|
ный пример которого показан на |
|||
|
|
|
рис. 3. Звено 2 на рис. 3 соверша- |
|||||
|
С |
ω3 |
|
|
ет плоскопараллельное движение. |
|||
|
|
|
Для отыскания МЦВ звена 2 не- |
|||||
|
Рис. 3 |
|
|
|
обходимо |
указать |
направления |
|
|
|
|
|
скоростей каких-либо двух точек |
||||
этого звена.. Первая скорость vB2 очевидна, она АВ. Вторую скорость |
||||||||
vС2 находят из разложения плоскопараллельного движения звена 2 на |
||||||||
вращательное со звеном 3 и поступательное относительно звена 3. Точ- |
||||||||
ка пересечения перпендикуляров к скоростям vB2 и vC2 даёт мгновенный |
||||||||
центр вращения звена 2 относительно звена 0 − М20. |
|
|||||||
|
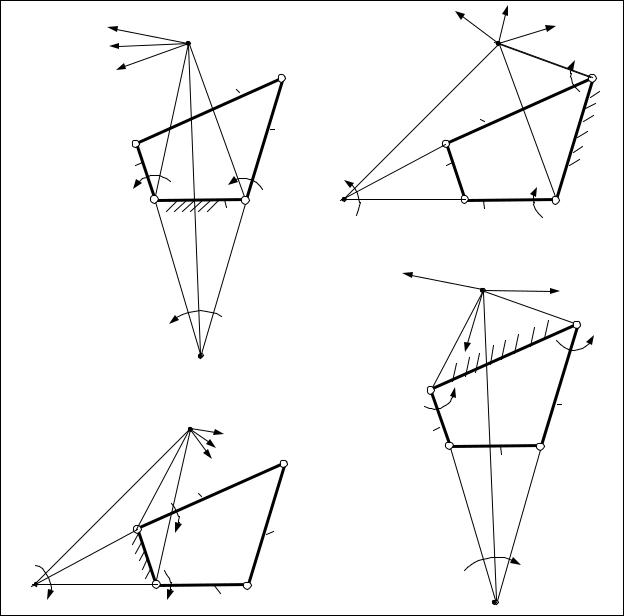
Ввиду большой насыщенности рисунков анализ движения относи- |
|||||||
тельно каждого из звеньев делается на отдельном рисунке. Для четы- |
||||||||
рёхзвенного механизма будет четыре рисунка (рис. 4). |
|
|||||||
|
|
|
|
|
4 |
|
|
|
|
|
|
vK |
|
|
|
|
vK |
|
vK |
vK |
|
|
|
К |
|
|
1 |
|
2 |
|
||
|
1 |
|
|
|
|
К |
|
0 |
|
|
|
vK |
|
|
|
|
|
|
ω2 |
|
|
|
2 |
|
|
|
C |
|
|
|
C |
|
|
vK3 |
|
2 |
|
|
|
|
|
||
|
|
|
|
|
2 |
|
|
|||
|
B |
|
|
|
3 |
B |
|
3 |
|
|
|
1 |
|
|
|
ω1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||
|
ω1 |
|
|
|
|
|
|
|
||
|
|
|
ω3 |
|
|
|
D |
|
||
|
A |
|
0 |
D |
М13 |
A |
0 |
ω |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
vK1 |
|
К |
|
vK0 |
|
|
|
|
ω2 |
|
|
vK3 |
|
2 |
C |
|
|
|
|
|
|
|
|
|
|||
|
|
|
М20 |
|
|
|
|
ω3 |
||
|
|
|
|
|
B |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
К |
vK0 |
|
|
ω1 |
|
|
3 |
|
|
|
|
C |
1 |
|
|
|
|
||
|
|
|
vK2 |
|
A |
|
0 |
D |
|
|
|
|
vK |
|
|
|
|
|
|||
|
|
2 |
3 |
|
|
|
|
|
|
|
|
B |
ω2 |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
М31 |
1 |
|
|
|
|
|
|
ω0 |
|
|
A |
|
|
D |
|
М02 |
|
|
|
||
ω3 |
ω0 |
0 |
Рис. 4 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПОРЯДОК РАБОТЫ |
|
|
|
|
|||
1.Изобразить схему предложенного механизма; пронумеровать звенья; обозначить шарнирные точки.
2.Произвести анализ абсолютных движений всех звеньев. Для этого указать направление движения каждого звена. Для звена, совершающего плоскопараллельное движение, найти МЦВ этого звена. В стороне от схемы отметить произвольную точку К и указать направление скорости точки К каждого из подвижных звеньев.
3.Подобно предыдущему, произвести анализ движений относительно каждого из подвижных звеньев механизма.
Отчёт оформить, как показано на рис. 4.
5
Составители Латышенко Михаил Павлович Ермак Владимир Николаевич
АНАЛИЗ ОТНОСИТЕЛЬНЫХ ДВИЖЕНИЙ
Методические указания к лабораторной работе по теории механизмов и машин
для студентов направлений 552900, 551800, 552100 и специальностей
120100, 120200, 170100, 170500, 150200, 240100, 240400
Редактор А. В. Дюмина
Подписано в печать 10. 06. 03. Формат 60×84/16. Бумага офсетная
Отпечатано на ризографе. Уч.-изд. л. 0,4. Тираж 550 экз. Заказ ГУ КузГТУ, 650026, Кемерово, ул. Весенняя, 28.
Типография ГУ КузГТУ, 650099, Кемерово, ул. Д. Бедного, 4 а.