

Е.К. Соколова Кинематика. Часть ІІ Кинематика плоского механизма
.pdf10
Продолжение табл. 2
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
ω3 |
2 |
2 |
3 |
3,5 |
4 |
5 |
|
|
20 |
R3 |
30 |
25 |
18 |
21 |
24 |
20 |
VA |
|
R1/r1 |
3 |
5 |
6 |
7 |
8 |
2 |
|||
|
|
||||||||
|
R2/r2 |
2 |
2 |
2 |
3 |
2 |
4 |
|
|
|
VB |
30 |
40 |
50 |
60 |
70 |
40 |
|
|
21 |
R3/r3 |
3 |
2,5 |
2 |
3 |
2 |
4 |
VA, ω1 |
|
|
R1 |
5 |
20 |
25 |
10 |
7 |
15 |
|
|
|
ω3 |
1,5 |
2 |
2,5 |
3 |
4 |
3 |
|
|
22 |
R1/r1 |
2 |
3 |
4 |
2 |
2 |
3 |
VA |
|
|
R3 |
15 |
20 |
10 |
15 |
20 |
15 |
|
|
|
VB |
12 |
15 |
20 |
25 |
30 |
40 |
|
|
23 |
R1 |
8 |
5 |
10 |
15 |
20 |
5 |
VA, ω1 |
|
|
R3/r3 |
2 |
3 |
2 |
3 |
2 |
8 |
|
|
24 |
VA |
15 |
20 |
18 |
25 |
30 |
40 |
|
|
R1/r1 |
3 |
2 |
3 |
5 |
3 |
5 |
VB |
||
|
R4/r4 |
4 |
2 |
4 |
10 |
2 |
8 |
|
|
|
VA |
15 |
10 |
20 |
15 |
20 |
25 |
|
|
25 |
R1/r1 |
3 |
2 |
3 |
4 |
5 |
3 |
VB, ω3 |
|
|
R3 |
5 |
10 |
15 |
15 |
25 |
15 |
|
|
|
VB |
5 |
7 |
8 |
10 |
15 |
20 |
|
|
26 |
R2/r2 |
3 |
4 |
2 |
5 |
2 |
2 |
VA, ω1 |
|
|
R1 |
10 |
14 |
4 |
20 |
10 |
8 |
|
|
27 |
VA |
60 |
120 |
100 |
80 |
70 |
90 |
|
|
|
R2 |
15 |
10 |
10 |
8 |
7 |
9 |
ω2, ω3 |
|
|
R3 |
60 |
50 |
50 |
40 |
35 |
30 |
|
|
28 |
VA |
20 |
25 |
30 |
40 |
35 |
40 |
|
|
|
R1/r1 |
2 |
5 |
3 |
8 |
7 |
5 |
VB |
|
|
R3/r3 |
5 |
4 |
10 |
2 |
1,5 |
8 |
|
|
29 |
ω1 |
2 |
3 |
4 |
5 |
2 |
6 |
|
|
|
R1 |
15 |
18 |
20 |
10 |
25 |
20 |
VA |
|
|
R2/r2 |
3 |
9 |
2 |
5 |
3 |
1,5 |
|
|
30 |
ω1 |
1,5 |
2 |
2,5 |
3 |
3,5 |
4 |
|
|
|
R1 |
2 |
3 |
3 |
2 |
2 |
1,5 |
VA, ω4 |
|
|
R2/r2 |
20 |
15 |
30 |
10 |
15 |
20 |
|
|
|
|
|
|
|
|
|
|
|
11
Тема: СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 1.ОБЩИЕ ПОЛОЖЕНИЯ
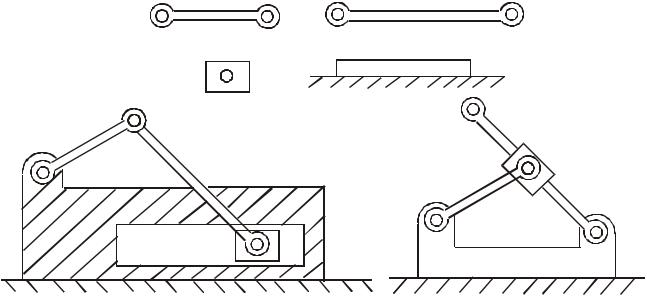
Рассмотрим оба вида движения на примере рычажных механизмов. Составим два рычажных механизма из следующих звеньев: двух рычагов, ползуна, неподвижной стойки (рис.5).
I |
|
|
2 |
1 |
2 |
|
II |
|
|
||
|
|
|
|
O |
|
|
3 |
|
|
1 |
|
|
|
|
|
|
|
O |
O1 |
|
3 |
|
|
|
|
4 |
|
|
4 |
|
Рис.5
В механизме I и II рычаг 2 совершает вращательное движение вокруг неподвижной оси О – это кривошип. Звено 3 в механизме I совершает плоское движение – это шатун, в механизме II - качается вокруг неподвижной оси О1 – это кулиса. Звено 4 (ползун) в механизме I совершает возвратно-поступательное движение в неподвижных направляющих стойки 1, в механизме II звено 4 связано осью А с вращающимся кривошипом 2, движется по кулисе 3 и вместе с ней качается вокруг оси О1, - это сложное движение. Так из данного набора звеньев получены два механизма, преобразующих вращательное движение кривошипа 2 в различающиеся движения других звеньев.
Определение основных кинематических характеристик при сложном движении точки и плоском движении твердого тела неизбежно связано с анализом структуры механизма, составной частью которого эта точка или тело являются.
12
2. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
При анализе механизма рассматривают, из каких элементов он состоит, по каким законам образован, что определяет характер относительного движения звеньев, чем определяется подвижность механизма.
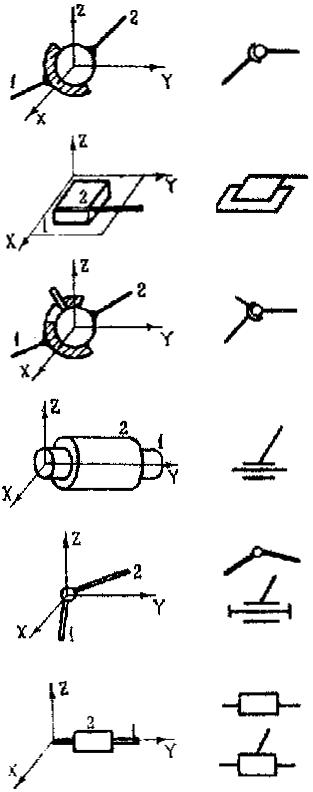
Элементами механизма являются звенья и кинематические пары. Определенность движения звеньев механизма обеспечивается тем, что эти звенья соединены между собой. Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой.
Кинематические пары различаются по числу связей, накладываемых на относительное движение. Свободное тело имеет шесть степеней свободы или шесть независимых перемещений. Звено, входящее в кинематическую пару, теряет часть степеней свободы: на тело накладываются условия связи с другим звеном (табл. 3). Число условий связей, отнимающих у звена кинематически независимые перемещения, может быть не более пяти, в противном случае получается жесткое соединение звеньев между собой.
Система звеньев, соединенных с помощью кинематических пар, называется кинематической цепью. Цепь, все звенья которой входят не менее чем в две кинематические пары и образует замкнутый контур, называется замкнутой.
Механизм представляет собой кинематическую цепь, в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья движутся определенным образом. Неподвижное звено, относительно которого рассматривается движение, называется стойкой. Звенья, положения которых определяют положение механизма, называют начальными или ведущими. В механизме с одной степенью свободы – одно начальное звено.
Простейшим механизмом называется двухзвенный механизм, образованный рычагом (кривошипом), входящим в пару с непод-
13
вижной стойкой, или ползуном с неподвижной направляющей
(рис.5).
Таблица 3
Кинематические пары в рычажных механизмах
Название |
Схема |
Обозначение |
Уравнения связи |
||||||||||||||||||||||||||||||
|
|
|
|
dX |
|
=0; |
dY |
|
=0; |
||||||||||||||||||||||||
Сферическая |
|
|
|
dt |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
dZ |
|
|
|
dt |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
0 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
dZ |
|
|
= 0; |
dϕx |
= 0; |
||||||||||||||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Плоская |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
dϕy |
|
= 0 |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
dX |
|
=0; |
dY |
|
=0; |
||||||||||||||||||||||||
Сферическая |
|
|
|
dt |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|||||||
с пальцем |
|
|
|
dZ |
|
= |
0; |
dϕy |
|
=0 |
|||||||||||||||||||||||
|
|
|
dt |
|
|
|
|
|
|
dt |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
dX |
|
= |
0; |
dZ |
=0; |
||||||||||||||||||||||||
Цилиндрическая |
|
|
|
dt |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
||||||||
|
|
|
dϕx |
=0; |
dϕz |
|
|
=0 |
|||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
dX |
|
= |
dY |
|
|
= |
dZ |
=0; |
|||||||||||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
Вращательная |
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
dt |
|
|||||||||||
|
|
|
dϕ |
x |
|
=0; |
dϕy |
=0 |
|||||||||||||||||||||||||
|
|
|
|
dt |
|
|
|
dt |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
dX |
|
= |
dZ |
|
|
= |
0; |
|
|||||||||||||||||||||
|
|
|
|
dt |
|
dt |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Поступательная |
|
|
|
dϕx |
|
|
|
= |
|
dϕy |
= 0; |
||||||||||||||||||||||
|
|
|
dt |
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
dϕz |
|
= 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14
A
VA
O  A
A 

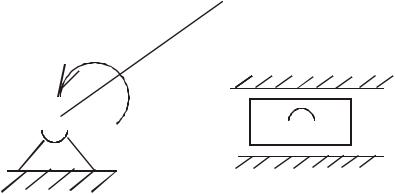
Рис.6 Любой более сложный механизм образуется присоединением
кначальному звену и стойке структурных групп.
Втабл. 4 представлены плоские структурные группы, разделенные на виды в зависимости от числа и взаимного расположения вращательных и поступательных кинематических пар, а также все виды плоских четырехзвенных механизмов.
Многозвенные плоские механизмы можно образовать из ряда последовательно соединенных четырехзвенных механизмов, поэтому их кинематическое исследование основано на последовательном кинематическом анализе четырехзвенных механизмов, входящих в их состав.
Вкинематическом исследовании механизмов выделим две задачи: изучение сложного движения точки состоит в определении абсолютных, переносных и относительных траекторий, скоростей и ускорений; изучение плоского движения твердого тела –в определении линейных скоростей и ускорений точек механизма и угловых скоростей и ускорений звеньев механизма.
3. АЛГОРИТМ РАСЧЕТА ПРИ СЛОЖНОМ ДВИЖЕНИИ ТОЧКИ
1.Провести структурный анализ механизма: выделить кривошип, кулису, шатун, ползун – определить название механизма.
2.Представить положение механизма при различных положениях начального звена.
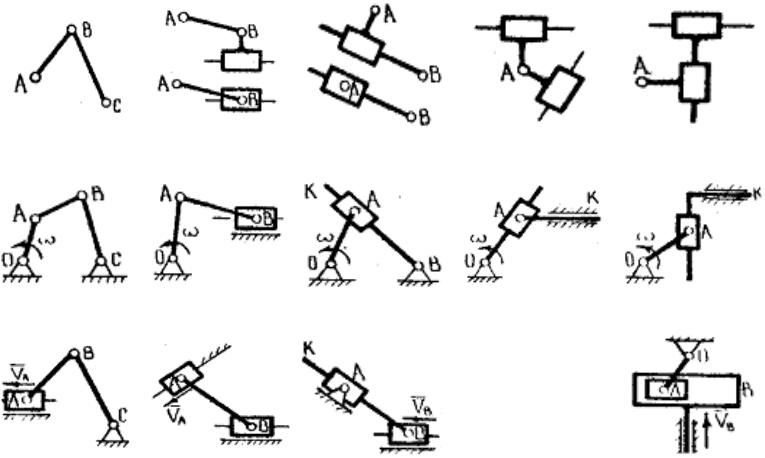
Таблица 4
Структурные группы, образующие четырехзвенные механизмы
Вид |
1 |
2 |
3 |
4 |
5 |
Схема |
|
|
|
|
|
кинематической |
|
|
|
|
|
пары (КП) |
|
|
|
|
|
|
|
|
|
|
|
Признак |
Все КП - враща- |
Крайняя КП- |
Средняя КП - |
Средняя КП - |
Крайняя КП - |
|
тельные |
поступательная |
поступательная |
вращательная |
вращательная |
Структурная груп- |
|
|
|
|
|
па присоединена к |
|
|
|
|
|
начальному звену- |
|
|
|
|
|
кривошипу и |
|
|
|
|
|
стойке |
|
|
|
|
|
|
|
|
|
|
|
Название |
Шарнирный |
Кривошипно- |
Кулисный |
Кулисно- |
Механизм двой- |
механизма |
четырехзвенник |
ползунный |
ползунный |
ного ползуна |
|
Структурная груп- |
|
|
|
- |
|
па присоединена к |
|
|
|
|
|
начальному звену- |
|
|
|
|
|
ползуну и стойке |
|
|
|
|
|
|
|
|
|
|
|
Название |
Кривошипно- |
Двух- |
Ползунно- |
|
Механизм двой- |
механизма |
ползунный |
ползунный |
кулисный |
|
ного ползуна |
16
3.Выбрать подвижную и неподвижную системы координат и связать их с определенными звеньями механизма. Установить абсолютное, относительное и переносное движение точки А.
4.Определить направление абсолютной VAa , относительной VAr ,
переносной скорости VAe . Построить параллелограмм скоростей (методом сложения или разложения скоростей).
5. Вычислить модуль абсолютной VAa , относительной VAr , пере-
носной скорости VAe .
6.Определить величину и направление переносной угловой скорости ω е.
7.Определить модуль и направление ускорения Кориолиса aкор.
8.На схеме механизма в положении, соответствующем заданному положению начального звена, показать векторы заданных и полу-
ченных кинематических характеристик (VAa , VAr , VAe , ω е, aкор).
4. ПРИМЕР СЛОЖНОГО ДВИЖЕНИЯ ТОЧКИ
Изучим сложное движение точки на примере кривошипнокулисного механизма (рис.7 ). Определим кинематические характеристики точек и звеньев механизма в предположении, что закон движения и основные кинематические характеристики ведущего звена - кривошипа ОА известны: ϕ1=ϕ1(t), ωOA, εOA.
Точка А участвует в сложном движении: абсолютном вращении вместе с кривошипом ОА вокруг точки О, переносном вращении вместе с кулисой О1В вокруг точки O1 и относительном поступательном движении ползуна А по кулисе О1В, поэтому ее абсолютная скорость равна векторной сумме переносной и относительной скоростей:
VAa =VAe +VAr ;
Из ∆OAO1 определим
O1A =  (OA)2 +(OO1 )2 −2(OA) (OO1 ) cos π2 +ϕ1 и
(OA)2 +(OO1 )2 −2(OA) (OO1 ) cos π2 +ϕ1 и
17
|
|
|
|
OO |
|
π |
|
|
|
|
|
||
|
sinα = |
|
|
1 |
sin |
|
+ |
ϕ |
1 |
|
, |
||
|
|
O A |
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
тогда, зная абсолютную скорость точки А: |
|
|
|
|
|
||||||||
|
VAa =ωAO OA |
|
|
|
|
|
|||||||
определим |
VAe =VAa cosα; |
VAr =VAa sinα. |
|||||||||||
Зная переносную скорость точки A |
|
|
|
|
|||||||||
|
VAe , определим угловую |
||||||||||||
скорость кулисы О1В: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
O B |
=ωe =V e |
/ O A , |
|||||||||
|
|
|
|
|
A |
|
|
1 |
|
||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
после этого можно найти направление и величину ускорения Кориолиса:
aкор = 2ω e ×VAr ; aкор = 2ωeVAr sin(ω e ,VAr ).
Вектор угловой скорости кулисы O1B ωO1B =ω e направлен по
оси вращения кулисы (рис.7).
Вектор ускорения Кориолиса перпендикулярен плоскости, проходящей через векторы ω e и VAr , и направлен таким образом, чтобы кратчайший поворот от первого вектора - ω e ко второму - VAr был виден происходящим против часовой стрелки (рис. 7). Так как угол между ω e и VAr равен 90°, окончательно имеем
aкор = 2ωeVAr .
Точка А участвует в сложном движении: абсолютном вращении вместе с кривошипом ОА вокруг точки О, переносном вращении вместе с кулисой О1В вокруг точки O1 и относительном поступательном движении ползуна А по кулисе О1В, поэтому ее ускорение равно:
|
aAa = aAe +aAr +aкор, |
(1) |
||
где |
aAa = aAOn |
+aAOτ ; |
|
(а) |
|
aAe = aAOn |
+aAOτ |
. |
(б) |
|
1 |
1 |
|
|

18
Рис.7

19
По известным значениям ωOA , εOA |
, ωO B определим ускорения |
||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
an |
=ω2 |
OA; |
aτ |
=ε |
OA |
OA; |
an |
=ω2 |
O A |
||
AO |
|
AO |
|
|
AO |
|
|
AO |
O B |
1 |
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
и изобразим их на рис.7, учитывая ориентацию εOA . |
|
||||||||||
Запишем уравнение (1) с учетом условий (а) и (б): |
|
||||||||||
|
|
aAOn |
+aτAO = aAOn |
+aτAO |
+aAr +aкор. |
(2) |
|||||
|
|
|
|
|
|
1 |
|
1 |
|
|
|
В полученном векторном уравнении имеем два неизвестных по |
|||||||||||
величине вектора |
aτAO1 |
и aAr . |
|
|
|
|
|
|
|||
Для их определения запишем уравнение (2) в проекциях на оси
Ах и Ау (рис.7):
−aAOn cosα +aτAO sinα = −aAOn 1 +aАr ;
−aAOn sinα +aτAO cosα = aτAO1 −aкор.
Отсюда
aАr = −aAOn cosα +aτAO sinα +aAOn 1 ;
(3)
aτAO1 = aAOn sinα +aτAO cosα +aкор.
Зная aτAO1 , определим угловое ускорение кулисы О1В
εO1A = aτAO1 .
O1 A
Знак величин aAr и aτAO1 , полученных из условия (3), определяет
истинное направление векторов соответствующих ускорений, что следует обязательно изобразить на чертеже (рис.7).
5. ИНДИВИДУАЛЬНЫЕ ЗАДАНИЯ по теме: СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Задача. Провести структурный анализ механизма (табл. 4, схемы 1-30). Изобразить положение механизма в соответствии с положением начального звена и геометрическими размерами звеньев (табл. 5). Определить кинематические характеристики, указанные в графе "Искомые параметры" табл. 5 (размеры звеньев – в см, угловые скорости – в рад/с, линейные скорости – в см/с).