

Е.К. Соколова Кинематика. Часть ІІ Кинематика плоского механизма
.pdfМинистерство образования Российской Федерации Кузбасский государственный технический университет
Кафедра теоретической и геотехнической механики
КИНЕМАТИКА
ЧастьII. Кинематика плоского механизма
Методические указания к выполнению индивидуальных заданий по курсу "Теоретическая механика" для студентов всех форм обучения специальности 170100 – "Горные машины и оборудование"
Составитель Е. К. Соколова Утверждены на заседании кафедры Протокол № 10 от 31.05. 01 Рекомендованы к печати учебно-методической комиссией по специальности 170100 Протокол № 8 от 21.06.01 Электронная копия находится в
библиотеке главного корпуса КузГТУ
Кемерово 2001
1
ВВЕДЕНИЕ
Кинематика изучает геометрические свойства движений объектов вне зависимости от физических факторов, вызывающих эти движения.
Кинематика выделилась в самостоятельный раздел теоретической механики в начале XIX века вместе с развитием машиностроения, широким применением механизмов, заменяющих ручной труд.
Французский ученый физик Ампер (1775-1836) впервые предложил в 1834 г. выделить раздел механики, изучающий законы движения точки и твердого тела безотносительно к причинам, его вызывающим, в отдельный раздел, получивший название кинематика.
Основы кинематики твердого тела развиты Леонардом Эйлером. Сложное движение точки исследовано Гаспаром Кориолисом. Кинематика механизмов получила теоретическое развитие в работах П.Л.Чебышева.
Разнообразие изучаемых в кинематике движений отражает разнообразие движений в природе и технике. Любая технологическая машина осуществляет рабочий процесс посредством выполнения закономерных механических движений, реализуемых соответствующими механизмами. Механизм есть система твердых тел, подвижно связанных путем соприкосновения и движущихся определенным образом относительно одного из них, принятого за неподвижное. Механизм выполняет функцию преобразования механического движения твердых тел. Если звенья механизма движутся в параллельных плоскостях, механизм называется плоским.
Вчасти I "Кинематика точки"предложен аналитический метод расчета траекторий, скоростей и ускорений точки. Быстрота и гибкость при поиске решений задач кинематики точки возможна только при использовании ЭВМ.
Вчасти II "Кинематика плоского механизма" предлагаются как аналитические, так и графо-аналитические методы расчета задач кинематики твердого тела и точки. Наглядность графо-аналитических методов позволяет осознать движение, представить траектории точек, их скорости и ускорения в определенном положении механизма.
Сопоставление результатов аналитических и графо-аналитичес- ких методов расчета позволяет проверить правильность и точность решения задач.
2
Тема: ПРЕОБРАЗОВАНИЕ ПРОСТЕЙШИХ ДВИЖЕНИЙ ТВЕРДОГО ТЕЛА 1. ОБЩИЕ ПОЛОЖЕНИЯ
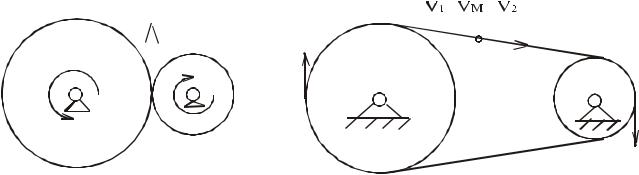
Преобразование и передача вращательного движения производится с помощью зубчатых передач. Передача движения осуществляется путем воздействия друг на друга зубьев, расположенных на поверхностях двух тел вращения (зубчатых колес, шестерен). В простейшей зубчатой передаче (рис.1) вращательное движение одного колеса преобразуется во вращательное движение другого колеса. Оба тела в точке контакта имеют равные линейные скорости (движение без скольжения): V1 =V2 .Отсюда, зная, что V =ωR , имеем
ω1R1 =ω2 R2 или
ϕ1 |
= |
n1 |
= |
ε1 |
|
|
ω1 |
= |
R2 |
|
|
D2 |
= |
z2 |
, |
||||||
|
|
||||||||||||||||||||
|
|
|
|
||||||||||||||||||
ϕ |
2 |
|
n |
2 |
|
ε |
2 |
|
|
ω |
2 |
|
R |
|
|
D |
|
z |
1 |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
||||||||
где ϕ - угол поворота, рад; n – число оборотов в минуту; ε – угловое ускорение, рад/с2; ω – угловая скорость, рад/с; R – радиус колеса, м; D – диаметр колеса, м; z – число зубьев.
Для преобразования вращательного движения в поступательное (и наоборот) или передачи вращения на большие расстояния в качестве промежуточных звеньев используют гибкие звенья: ремни, ленты, тросы, цепи (рис.2). Сцепление гибкой связи с колесами осуществляется за счет трения или зацепления (звездочка - цепь).
V1=V2 |
|
|
|
|
|
||
|
|
|
|
|
|||
|
|
|
|
|
|||
I |
|
II |
V1 |
|
|
|
VM |
|
|
|
|
||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
II |
|
|
|
|
|
|
|
V2 |
Рис.1 Рис.2
3
Проскальзыванием гибкой связи по колесам пренебрегают:
V1 =VM =V2 .
Для преобразования вращательного движения в прямолинейное поступательное движение используют винтовые механизмы: пара винт – гайка, червячные передачи: пара червяк (зубчатая рейка) – зубчатое колесо.
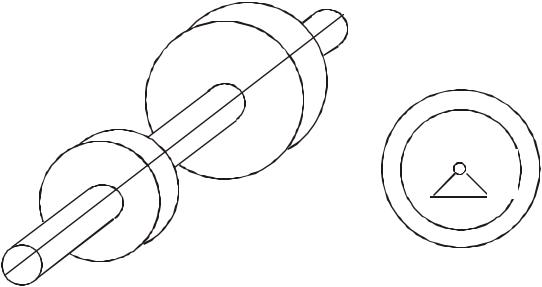
При передаче вращения из одной плоскости в другую, ей параллельную, используют зубчатые колеса, расположенные на одной оси вращения (рис.3). Угловые скорости таких колес равны: ω1 =ω2 .
II |
ωI=ωII |
I
II 

 II
II
Рис.3
2. ПРИМЕР
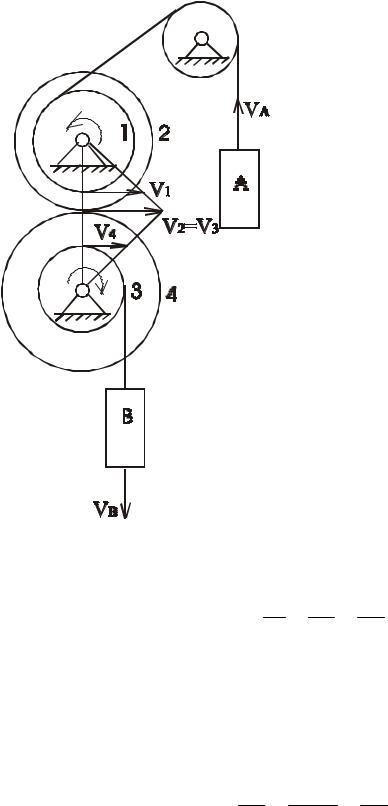
Механизм, совершающий преобразование поступательного движения груза А в поступательное движение груза В (рис.4), состоит из шестерен 2 и 3 с радиусами R2=0,5 м и R3=0,6 м. Нить от груза А, огибая вращающийся блок С, навивается на обод колеса 1, расположенного на одной оси вращения с шестерней 2. Груз В закреплен на нити, навитой на обод колеса 4, расположенного на одной оси вращения с шестерней 3. Радиусы колес 1 и 4 равны r1=0,2 м и r4=0,3 м. Зная скорость груза А VA=4 м/с, определить скорость груза В, а также угловые скорости шестерен 2 и 3.
|
|
4 |
|
|
Рассмотрим, как передается движение в этом механизме. |
|
|||
|
|
Проскальзыванием нити по обо- |
||
|
дам блока С и колеса 1 пренебрегаем, |
|||
|
поэтому скорость на ободе колеса 1 |
|||
|
равна скорости груза А: |
|
||
|
|
|
VA=V1 . |
(1) |
|
|
Колесо 1 и шестерня 2, располо- |
||
|
женные на одной оси, вращаются с |
|||
|
одинаковыми угловыми скоростями: |
|||
|
|
|
ω1 =ω2 . |
(2) |
|
|
В точке сцепления К шестерен 2 |
||
|
и 3 имеем равные окружные скорости: |
|||
|
|
|
V2=V3 . |
(3) |
|
|
Колесо 4 и шестерня 3, располо- |
||
|
женные на одной оси, вращаются с |
|||
|
одинаковыми угловыми скоростями: |
|||
|
|
|
ω3 =ω4 . |
(4) |
|
|
Окружная скорость колеса 4 |
|
|
|
равна скорости груза В: |
|
||
Рис.4 |
|
|
V4=VВ . |
(5) |
Учитывая условие (1), определим угловую скорость колеса 1: |
||||
ω1 =V1 =VA = |
4 = 20 рад/с. |
|
||
|
r1 |
r1 |
0,2 |
|
Из условия (2) имеем |
ω2 =ω1 = 20 рад/с. |
|
||
Скорость в точке сцепления К равна |
|
|||
V2 =ω2 R2 = 20 0,5 =10 м/с. |
|
|||
Используя условия (3) и (4), получаем |
|
|||
ω3 = V3 |
=VAR2 = |
10 =16,66 рад/с, |
|
|
R3 |
r1R3 |
0,6 |
|
|
ω4 =16,66 м/с.
Определим окружную скорость на колесе 4
5
V |
4 |
=ω |
r |
=V |
|
r4 R2 |
= 4 |
0,3 |
0,5 |
= 5 м/с. |
|
|
|
0,2 |
0,6 |
||||||||
|
|
4 4 |
|
A r R |
3 |
|
|
||||
|
|
|
|
|
1 |
|
|
|
|
||
Из условия (5) имеем |
VB =V4 = 5 м/с. |
|
|
||||||||
3. ИНДИВИДУАЛЬНЫЕ ЗАДАНИЯ по теме: ПРЕОБРАЗОВАНИЕ ПРОСТЕЙШИХ
ДВИЖЕНИЙ ТВЕРДОГО ТЕЛА
ЗАДАЧА. В механизме, совершающем преобразование вращательного движения в поступательное (или обратное преобразование), преобразование вращения вокруг одной неподвижной оси во вращение вокруг другой неподвижной оси или преобразование одного поступательного движения в другое поступательное движение (табл. 1, схемы 1-30), исследовать закон передачи перемещений и скоростей от одного звена к другому. Исходные и искомые параметры представлены в табл. 2 (линейные размеры – в м, угловые скорости – в рад/с, линейные скорости – в м/с).

6
1
7
1
Продолжение таблицы 1
8
|
|
|
|
|
|
|
|
Таблица 2 |
|
. |
Исходные |
Значения исходных параметров |
Искомые |
||||||
рис№ |
|
|
|
|
|
|
|||
1 |
2 |
3 |
4 |
5 |
6 |
||||
параметры |
параметры |
||||||||
|
|
|
|
№ варианта |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
VA |
10 |
15 |
20 |
5 |
12 |
10 |
|
|
1 |
R3 |
20 |
30 |
20 |
30 |
50 |
15 |
ω3 |
|
R1/r1 |
3 |
2 |
4 |
2 |
3 |
4 |
|||
|
|
||||||||
|
R2/r2 |
2 |
3 |
2 |
4 |
3 |
4 |
|
|
|
VA |
10 |
15 |
20 |
25 |
30 |
40 |
|
|
2 |
R3 |
5 |
30 |
10 |
10 |
15 |
20 |
ω3 |
|
R1/r1 |
2 |
3 |
3 |
4 |
2 |
2 |
|||
|
|
||||||||
|
R2/r2 |
2 |
2 |
3 |
2 |
4 |
3 |
|
|
|
ω3 |
1 |
2 |
0,5 |
0,5 |
1,5 |
2,5 |
|
|
3 |
R3 |
10 |
5 |
20 |
15 |
10 |
5 |
VA |
|
R1/r1 |
2 |
3 |
2 |
4 |
2 |
3 |
|||
|
|
||||||||
|
R2/r2 |
2 |
2 |
3 |
4 |
4 |
4 |
|
|
|
VA |
4 |
2 |
6 |
8 |
5 |
10 |
|
|
4 |
r1/R1 |
0,3 |
0,75 |
0,5 |
0,3 |
0,4 |
0,4 |
VB |
|
|
r2/R2 |
0,5 |
0,25 |
0,5 |
0,6 |
0,2 |
0,6 |
|
|
|
VB |
10 |
15 |
20 |
12 |
25 |
30 |
|
|
5 |
R1/r1 |
2 |
2 |
3 |
3 |
2 |
3 |
VA |
|
R2/r2 |
2 |
4 |
2 |
3 |
3 |
2 |
|||
|
|
||||||||
|
R3/r3 |
3 |
3 |
4 |
3 |
3 |
5 |
|
|
|
ω3 |
1,2 |
1,5 |
2 |
4 |
5 |
6 |
|
|
6 |
R3 |
20 |
20 |
25 |
15 |
10 |
15 |
VA |
|
R1/r1 |
3 |
2 |
4 |
2 |
5 |
3 |
|||
|
|
||||||||
|
R2/r2 |
3 |
2 |
5 |
3 |
2 |
2 |
|
|
|
ω1 |
12 |
6 |
18 |
24 |
30 |
36 |
|
|
7 |
R1/r1 |
2 |
4 |
3 |
4 |
5 |
2 |
ω3 |
|
R2/r2 |
3 |
5 |
4 |
2 |
2 |
2 |
|||
|
|
||||||||
|
R1/R3 |
2 |
2 |
3 |
2 |
3 |
2 |
|
|
|
VA |
10 |
12 |
15 |
20 |
24 |
25 |
|
|
8 |
R1/r1 |
0,5 |
0,3 |
0,4 |
0,5 |
0,6 |
0,2 |
VB |
|
|
R2/r2 |
0,5 |
0,3 |
0,5 |
0,4 |
0,2 |
0,3 |
|
|
9
Продолжение табл. 2
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
9 |
VB |
20 |
16 |
18 |
24 |
30 |
36 |
|
|
R1/r1 |
3 |
4 |
2 |
2 |
2 |
2 |
VA |
||
|
R2/r2 |
2 |
4 |
3 |
4 |
3 |
6 |
|
|
|
VA |
24 |
12 |
30 |
40 |
50 |
60 |
|
|
10 |
R1/r1 |
2 |
3 |
5 |
2 |
5 |
6 |
VB |
|
|
R2/r2 |
3 |
2 |
2 |
2 |
2 |
2 |
|
|
|
VA |
10 |
15 |
15 |
20 |
40 |
60 |
|
|
11 |
R1/r1 |
2 |
2 |
3 |
3 |
3 |
2 |
VB |
|
|
R2/r2 |
2 |
3 |
2 |
2 |
3 |
2 |
|
|
|
VA |
30 |
40 |
50 |
60 |
20 |
20 |
|
|
12 |
R1/r1 |
2 |
3 |
2 |
2 |
4 |
5 |
VB |
|
|
R2/r2 |
3 |
4 |
5 |
5 |
2 |
2 |
|
|
13 |
VA |
15 |
20 |
25 |
30 |
25 |
50 |
|
|
R1/r1 |
2 |
4 |
3 |
2 |
3 |
2 |
VB |
||
|
R2/r2 |
3 |
2 |
3 |
2 |
2 |
3 |
|
|
|
VA |
10 |
12 |
16 |
20 |
24 |
30 |
|
|
14 |
R1/r1 |
2 |
2 |
2 |
2 |
3 |
2 |
VB |
|
|
R2/r2 |
2 |
3 |
2 |
4 |
2 |
3 |
|
|
15 |
VA |
15 |
20 |
25 |
30 |
35 |
40 |
VB |
|
R1/r1 |
3 |
2 |
5 |
3 |
5 |
4 |
|||
|
VA |
60 |
30 |
40 |
20 |
15 |
20 |
|
|
16 |
R1/r1 |
3 |
2 |
2 |
4 |
5 |
3 |
ω3 |
|
R2/r2 |
2 |
3 |
4 |
2 |
2 |
2 |
|||
|
|
||||||||
|
R3 |
10 |
10 |
20 |
5 |
6 |
5 |
|
|
|
VA |
10 |
20 |
30 |
25 |
30 |
20 |
|
|
17 |
R3/r3 |
2 |
2 |
3 |
3 |
4 |
5 |
ω1 |
|
R2/r2 |
3 |
4 |
2 |
2 |
3 |
3 |
|||
|
|
||||||||
|
R1 |
10 |
20 |
10 |
10 |
15 |
10 |
|
|
|
ω1 |
2 |
3 |
4 |
1 |
2 |
3 |
|
|
18 |
R2/r2 |
3 |
2 |
3 |
2 |
5 |
3 |
VA |
|
|
r3 |
10 |
15 |
12 |
25 |
15 |
12 |
|
|
19 |
ω1 |
2 |
3 |
4 |
5 |
6 |
3,5 |
|
|
R1 |
15 |
20 |
15 |
10 |
10 |
20 |
VB, ω4 |
||
|
R4 |
10 |
15 |
20 |
15 |
20 |
15 |
|
|
|
|
|
|
|
|
|
|
|