

Е.К. Соколова Кинематика. Часть ІІ Кинематика плоского механизма
.pdf
|
|
|
20 |
|
|
|
|
|
Таблица 5 |
|
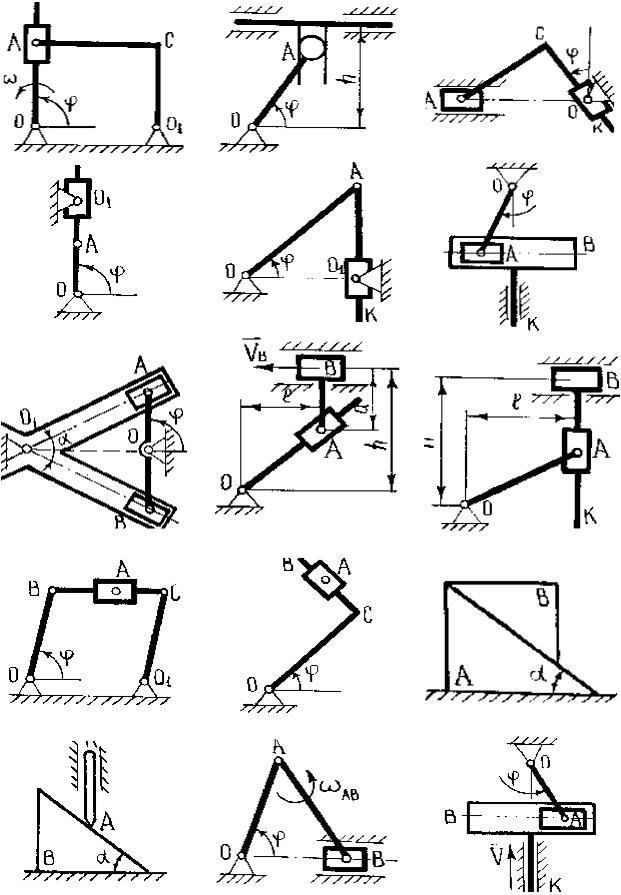
Схемы для изучения темы: "Сложное движение точки" |
|||
1 |
|
2 |
|
3 |
|
|
|
|
|
4 |
|
5 |
|
6 |
|
|
|
|
|
7 |
|
8 |
|
9 |
|
|
|
|
|
10 |
|
11 |
|
12 |
|
|
|
|
|
13 |
|
14 |
|
15 |
|
|
|
|
|
|
|
21 |
|
|
|
|
Продолжение табл. 5 |
16 |
17 |
|
18 |
|
|
|
|
19 |
20 |
|
21 |
|
|
|
|
22 |
|
|
24 |
|
|
|
|
25 |
26 |
|
27 |
|
|
|
|
28 |
29 |
|
30 |
|
|
|
|
22
Таблица 6 Задание для изучения темы: "Сложное движение точки"
. |
|
Значения исходных параметров |
|
||||||
рис |
Исходные |
Искомые |
|||||||
|
|
№ варианта |
|
|
|||||
№ |
параметры |
|
|
|
|
|
|
параметры |
|
1 |
2 |
3 |
4 |
5 |
6 |
||||
|
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
ОА |
15 |
20 |
30 |
30 |
20 |
50 |
VAe , VAr , |
|
|
ОО1 |
20 |
30 |
42 |
30 |
30 |
30 |
||
1 |
ϕ |
0 |
30 |
45 |
60 |
90 |
270 |
ωO A ,aкор |
|
|
ωОА |
2 |
3 |
4 |
2 |
3 |
4 |
1 |
|
|
|
||||||||
|
О1А |
30 |
30 |
40 |
40 |
60 |
20 |
VAe , VAr , |
|
2 |
ОО1 |
10 |
20 |
20 |
30 |
40 |
10 |
||
|
ϕ |
0 |
30 |
45 |
60 |
90 |
270 |
ωOA ,aкор |
|
|
ωО1А |
1 |
2 |
1 |
2 |
1 |
4 |
|
|
3 |
h |
20 |
30 |
40 |
40 |
20 |
30 |
VAa , VAr , |
|
ϕ |
30 |
45 |
60 |
30 |
45 |
60 |
aкор |
||
|
ωОА |
2 |
3 |
4 |
4 |
3 |
2 |
||
|
OA |
10 |
15 |
20 |
30 |
40 |
50 |
|
|
|
h |
20 |
20 |
40 |
20 |
30 |
40 |
VAe , VAr , |
|
4 |
ϕ |
20 |
30 |
40 |
40 |
50 |
60 |
ωO B ,aкор |
|
|
l |
0 |
30 |
45 |
60 |
90 |
45 |
1 |
|
|
ωОА |
1 |
2 |
3 |
1 |
2 |
3 |
|
|
|
h |
10 |
20 |
30 |
15 |
40 |
50 |
ωOA ,aкор |
|
5 |
VA |
10 |
0 |
30 |
40 |
50 |
60 |
||
|
OA |
15 |
30 |
45 |
30 |
50 |
70 |
|
|
6 |
ωОА |
1 |
2 |
3 |
4 |
2 |
3 |
VAa , aкор |
|
h |
10 |
15 |
20 |
30 |
40 |
50 |
|||
|
l |
20 |
40 |
40 |
50 |
60 |
80 |
|
|
|
OA |
10 |
20 |
30 |
40 |
40 |
50 |
VB , aкор |
|
7 |
ϕ |
0 |
30 |
45 |
60 |
45 |
60 |
||
|
ωОА |
2 |
3 |
2 |
1 |
2 |
0,5 |
|
|
8 |
OA |
10 |
15 |
25 |
30 |
40 |
50 |
VК , aкор |
|
ϕ |
0 |
30 |
45 |
60 |
90 |
30 |
|||
|
ωОА |
5 |
4 |
3 |
2 |
1 |
0,5 |
|
|
23
Продолжение табл. 6
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
|
l |
20 |
30 |
40 |
20 |
40 |
30 |
VК , aкор |
|
9 |
ϕ |
15 |
30 |
45 |
60 |
30 |
45 |
||
|
ωОА |
2 |
1 |
1 |
3 |
1 |
4 |
|
|
|
VK |
10 |
15 |
20 |
5 |
10 |
12 |
|
|
10 |
h |
20 |
30 |
40 |
30 |
40 |
50 |
ωOВ ,aкор |
|
|
c |
10 |
10 |
10 |
15 |
20 |
30 |
|
|
|
a |
10 |
20 |
30 |
40 |
20 |
10 |
|
|
11 |
ωO1B |
3 |
4 |
2 |
1 |
2 |
1 |
ωOВ,VAr , |
|
OO1 |
10 |
20 |
30 |
40 |
15 |
30 |
|||
aкор |
|||||||||
|
OB |
20 |
20 |
30 |
50 |
25 |
50 |
||
|
ϕ |
30 |
45 |
60 |
90 |
135 |
0 |
|
|
12 |
ωO1B |
1 |
1 |
2 |
3 |
4 |
5 |
ωOВ ,VAr , |
|
OO1 |
10 |
15 |
30 |
15 |
20 |
20 |
|||
|
O1B |
20 |
30 |
30 |
20 |
40 |
20 |
aкор |
|
|
ϕ |
0 |
30 |
45 |
60 |
90 |
30 |
|
|
|
VB |
10 |
20 |
30 |
40 |
50 |
60 |
ωOС ,aкор |
|
13 |
h |
14 |
25 |
15 |
32 |
30 |
50 |
||
|
AB |
10 |
20 |
15 |
20 |
30 |
30 |
|
|
|
VAr |
7 |
10 |
26 |
20 |
43,5 |
30 |
|
|
|
OO1 |
10 |
15 |
20 |
25 |
30 |
40 |
|
|
14 |
OA |
15 |
20 |
15 |
30 |
20 |
50 |
ωO В ,aкор |
|
ϕ |
30 |
30 |
45 |
60 |
30 |
60 |
|||
|
ωOA |
5 |
4 |
4 |
1 |
2 |
1 |
1 |
|
|
|
||||||||
|
O1C |
10 |
10 |
7 |
20 |
10 |
40 |
|
|
15 |
VAa |
40 |
50 |
30 |
20 |
15 |
30 |
|
|
α |
45 |
45 |
90 |
60 |
60 |
30 |
ωOCB ,aкор |
||
|
ϕ |
60 |
90 |
30 |
60 |
45 |
90 |
|
|
|
OC |
20 |
30 |
25 |
30 |
30 |
10 |
|
|
16 |
ωOA |
2 |
3 |
1 |
2 |
2 |
1 |
ωO CА,aкор |
|
ϕ |
30 |
45 |
60 |
90 |
120 |
135 |
|||
|
AC=OO1 |
30 |
40 |
50 |
20 |
30 |
30 |
1 |
|
|
|
||||||||
|
O1C |
20 |
30 |
40 |
40 |
40 |
50 |
|
|
17 |
ωOA |
1 |
|
3 |
4 |
2 |
1 |
VВС , aкор |
|
ϕ |
30 |
45 |
60 |
90 |
15 |
75 |
|||
|
h |
40 |
40 |
20 |
25 |
30 |
50 |
|
24
Продолжение табл. 6
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
VA |
20 |
30 |
40 |
20 |
30 |
40 |
ωАCОК ,aкор |
18 |
AC |
30 |
40 |
30 |
40 |
30 |
40 |
|
|
ϕ |
30 |
45 |
60 |
30 |
45 |
60 |
|
|
|
|
|
|
|
|
|
|
|
ϕ |
30 |
45 |
60 |
90 |
120 |
135 |
|
19 |
ωOA |
3 |
2 |
1 |
1 |
2 |
1 |
ωАО В ,aкор |
|
OA |
20 |
20 |
30 |
30 |
30 |
40 |
1 |
|
|
|||||||
|
OO1 |
30 |
40 |
50 |
60 |
40 |
50 |
|
20 |
ϕ |
0 |
30 |
45 |
60 |
90 |
120 |
|
ωOA |
5 |
4 |
3 |
2 |
3 |
1 |
ωАО В ,aкор |
|
|
OA |
20 |
25 |
30 |
40 |
50 |
20 |
1 |
|
OO1 |
10 |
10 |
15 |
20 |
40 |
20 |
|
21 |
ϕ |
60 |
0 |
30 |
45 |
30 |
45 |
|
ωOA |
4 |
3 |
2 |
1 |
1 |
0,5 |
VК , aкор |
|
|
OA |
20 |
20 |
30 |
40 |
50 |
60 |
|
|
ϕ |
0 |
30 |
45 |
60 |
90 |
120 |
ωkpec ,aкор |
22 |
ω |
4 |
2 |
3 |
3 |
2 |
1 |
|
|
OA |
10 |
20 |
10 |
20 |
30 |
40 |
|
|
OA=OO1 |
|
||||||
|
h |
20 |
20 |
30 |
30 |
40 |
30 |
ωОК ,aкор |
23 |
a |
5 |
5 |
15 |
10 |
10 |
15 |
|
|
VB |
10 |
15 |
20 |
15 |
20 |
10 |
|
|
l |
15 |
20 |
15 |
20 |
40 |
40 |
|
|
h |
50 |
40 |
40 |
30 |
50 |
45 |
ωАО ,aкор |
24 |
l |
30 |
20 |
15 |
10 |
20 |
0 |
|
|
OA |
40 |
30 |
25 |
20 |
30 |
25 |
|
|
VB |
10 |
15 |
20 |
25 |
35 |
30 |
|
|
VAr |
10 |
20 |
10 |
20 |
10 |
20 |
|
|
OC |
30 |
40 |
50 |
30 |
40 |
50 |
VAа ,aкор |
25 |
AC |
10 |
20 |
30 |
20 |
15 |
10 |
|
|
ϕ |
0 |
30 |
45 |
60 |
90 |
120 |
|
|
ωOA |
2 |
2 |
1 |
2 |
2 |
1 |
|
|
OB=O1C |
20 |
30 |
40 |
50 |
60 |
15 |
|
26 |
ωOB |
2 |
3 |
2 |
1 |
1 |
4 |
VAа ,aкор |
|
ϕ |
10 |
20 |
30 |
40 |
50 |
60 |
|
|
VAr |
30 |
45 |
60 |
90 |
120 |
135 |
|
|
|
|
|
|
|
|
|
|
25
Продолжение табл. 6
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
VВr |
10 |
20 |
30 |
40 |
50 |
60 |
VВа ,aкор |
27 |
α |
15 |
30 |
45 |
60 |
45 |
30 |
|
|
VA |
10 |
10 |
20 |
15 |
20 |
30 |
|
28 |
VAK |
10 |
20 |
30 |
40 |
50 |
60 |
VВ ,aкор |
|
α |
15 |
30 |
45 |
60 |
45 |
30 |
|
29 |
VB |
10 |
20 |
30 |
40 |
25 |
45 |
ωAB , ωOA , |
ϕ |
15 |
30 |
45 |
60 |
30 |
45 |
||
|
OA |
20 |
15 |
15 |
20 |
10 |
30 |
akop |
30 |
VK |
10 |
30 |
20 |
40 |
25 |
45 |
ωAB , ωOA , |
ϕ |
15 |
45 |
30 |
60 |
30 |
45 |
||
|
OA |
20 |
15 |
15 |
20 |
10 |
30 |
akop |
6. АЛГОРИТМ РАСЧЕТА ПРИ ПЛОСКОМ ДВИЖЕНИИ ТВЕРДОГО ТЕЛА
1.Построить схему механизма в положении, соответствующем заданному положению начального звена. Для построения задаться масштабным коэффициентом – отношением размеров изображения звеньев на чертеже к их истинным размерам. Положение звеньев можно получить методом засечек.
2.Определить величину и направление скорости полюса А
3.Определить направление скорости точки В.
4.Провести перпендикуляры к векторам скоростей точек А и В
–точка пересечения даст положение мгновенного центра скоростей.
5.Расстояния до мгновенного центра скоростей от точек А, В,
С3 получить измерением соответствующих отрезков на схеме с учетом масштабного коэффициента.
6.Определить величину скоростей точек В и С звена, совершающего плоское движение, а также величину и направление угловой скорости.
7.Построить план ускорений для звена, совершающего плоское движение.
8.Определить величину и направление углового ускорения звена и величину и направление ускорения точек В и С, используя данные, полученные на плане ускорений.
26
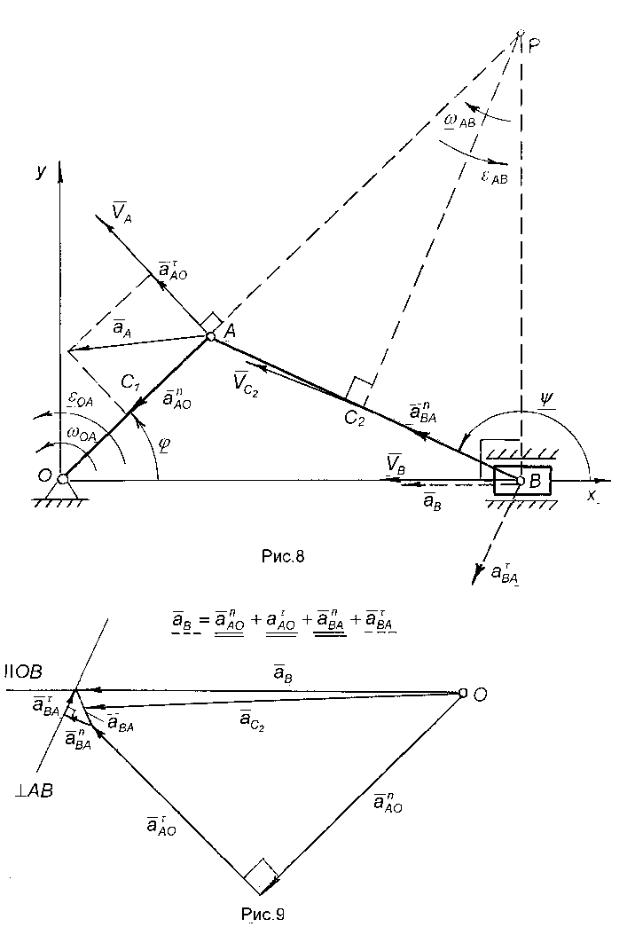
7. ПРИМЕР РАСЧЕТА ПРИ ПЛОСКОМ ДВИЖЕНИИ ТВЕРДОГО ТЕЛА
Для кривошипно-шатунного механизма (рис.8) необходимо узнать скорости и ускорения точек С1 и С2, являющихся центрами масс кривошипа и шатуна, точек А и В, а также угловое ускорение шатуна АВ - εAB в предположении, что закон движения кривошипа ОА извес-
тен: ϕ = π4 t3 ; ОА=0,3м; АВ=0,5м. Расчет осуществляем для положе-
ния механизма, при котором угол поворота кривошипа ОА
ϕ1 |
= |
π рад. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определим кинематические характеристики звеньев механизма. |
||||||||||||||||||||||||||
|
|
Кривошип ОА вращается, поэтому для него имеем: |
|
|
||||||||||||||||||||||||
|
|
угловая скорость |
|
|
ωОА = |
|
dϕ |
|
= 3 |
π |
t |
2 |
, рад/ с; |
|
|
|||||||||||||
|
|
|
|
|
|
dt |
|
4 |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
угловое ускорение |
εОА |
= |
dωОА |
=6 |
π |
t |
= 3 |
π |
t, рад/ с |
2 |
. |
|||||||||||||||
|
|
|
|
dt |
|
|
|
4 |
2 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Положение кривошипа ϕ1 |
= |
|
π |
достигается к моменту времени, |
||||||||||||||||||||||
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
который определяем из условия: |
|
π |
= |
π |
t |
3 |
, отсюда t=1c. |
|
|
|||||||||||||||||||
|
4 |
|
4 |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
3π |
|
|
|
|
|
|
|
|
3π |
|
|
|
|
|
|||||||
|
|
В этот момент времени ωОА = |
|
; |
|
|
|
εОА |
= |
|
. |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Для точки А имеем в момент времени t=1c: |
|
|
|
|
|
|
||||||||||||||||||||
|
|
скорость VА =ωOA AO = 3π |
0,3 |
=0,7068м/ с; |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
ускорения нормальное, касательное и полное |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
3π |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
аAnО =ωOA2 |
OA = |
|
|
|
|
|
0,3 =1,6654 м/ с2 ; |
|
|
|||||||||||||||||
|
|
4 |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||

|
|
|
|
|
|
|
|
|
|
|
|
|
|
27 |
|
|
|
|
|
|
|
||||
|
аτAО =εOA OA = |
|
3π |
|
0,3 =1,4137 м/ с2 ; |
||||||||||||||||||||
|
4 |
||||||||||||||||||||||||
|
(aOAn )2 + (aOAτ |
)2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
a A = |
|
= |
1,6654 2 + 1,4137 2 = 2 ,1845 . |
||||||||||||||||||||||
Шатун АВ совершает плоское движение: скорости его точек В и |
|||||||||||||||||||||||||
С2 и угловая скорость ωАВ подчиняются закону: |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
VB |
= |
|
VB |
= |
|
|
VC2 |
=ω |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
AP |
|
|
BP |
|
|
C2P |
AB |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
и равны |
VB |
=VA |
|
BP |
=0,7068 |
1,31 |
=0,7290м/ с, |
||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
AP |
|
|
|
|
|
1,27 |
|
|
|
||||||||||||
|
V |
=V |
A |
С2 P |
=0,7068 |
1,17 |
=0,6511м/ с, |
||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||
|
С2 |
|
|
AP |
|
|
|
|
|
|
|
1,27 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
ωАB |
= |
VА |
|
= |
0,7068 |
|
=0,5565 рад/ с. |
|||||||||||||||||
|
|
|
1,27 |
|
|
||||||||||||||||||||
|
|
|
|
|
|
AP |
|
|
|
|
|
|
|
|
|||||||||||
Примечание: расстояния от точек А, В, С2 до мгновенного центра скоростей Р определяем, измеряя их на чертеже механизма и учитывая масштаб чертежа (рис.8).
Точка В принадлежит ползуну и шатуну АВ одновременно: вместе с ползуном она совершает возвратно-поступательное движение, а с шатуном – плоское движение. Ускорение точки В равно
|
aB = aA +aBA |
|
или |
aB = aAOn +aτAO +aBAn +aBAτ . |
(4) |
Нормальное ускорение aBAn можно определить, так как известна |
||
угловая скорость шатуна АВ |
|
|
aBAn |
=ωAB2 AB =( 0,5565 )2 0,5 =0,1548 м/с2 . |
|
Тогда в векторном уравнении (4) остается два неизвестных по величине вектора aB и aBAτ , направление этих векторов известно, но неясна их ориентация.
28
Построим план ускорений: векторный многоугольник, изображающий выражение (4) в масштабе (рис.9). Для этого из произвольной точки О отложим в том порядке, который диктует формула (4)
векторы aAnО , aτAО и aBAn , учитывая их величину и направление. Затем из точки О проводим линию, параллельную направлению вектора aB (IIOB), а из конца вектора aBAn линию, перпендикулярную АВ
(вектор касательного ускорения aBAτ AB). Точка пересечения этих линий отсечет на ней необходимые отрезки: aτBA и aB , измеряя их,
определяем величину ускорений aB =2,26м/с2; aτBA=0,16м/с2, а из
плана – их направление.
Определим угловое ускорение шатуна АВ:
εAB = aτBA / AB =0,16/0,5=0,8рад/с2,
ориентация которого в данном положении механизма определяется по направлению касательного ускорения aτBA, т.е. εAB – против часовой стрелки.
Ускорение точки С2 определяем из суммы векторов:
|
n |
τ |
n |
τ |
= aA + aBA / 2 , |
|
|
aС2 = aAО + aAО+ aС2 A |
+ aС2 A |
|
|||
направление a |
- на плане ускорений (рис.9); величина a |
=2,2м/с2. |
||||
|
С2 |
|
|
|
|
С2 |
Для определения положения мгновенного центра ускорений вычислим угол µ, зная, что
tgµ = |
|
aτBA |
|
|
= |
|
|
εBA |
|
|
. |
|
|
|
|
||||||||
|
|
|
|
||||||||
|
aBAn |
|
|
|
|
|
|||||
|
|
|
|
|
ωBA2 |
||||||
Для положения механизма, соответствующего положению кри-
вошипа ϕ1 = π4 , имеем
tgµ = |
0,8 |
=2,6666, |
|
(0,5565)2 |
|||
|
|
отсюда µ = arctg(2,6666)=68,84о.
29