

[ Будылин ] Лекции по математике. 3 семестр
.pdfПри этом все базисы на плоскости R2 разделяются на два класса. В один класс входят те базисы (e1, e2), для которых det(e1, e2) = e1 e2 > 0, в другой — det(e1, e2) = e1 e2 < 0. Эти два класса базисов называются ориентациями на плоскости. Таким образом, ориентацию на плоскости задает выбор базиса (e1, e2). Говорят, что плоскость право ориентирована, если e1 e2 > 0 и лево ориентирована, если e1 e2 < 0. Вместе с тем, можно сказать, что ориентацию плоскости задает функция det (или любая другая ненулевая форма объема на плоскости). Именно выбор такой функции позволяет относить базисы к одной или другой ориентации. Это замечание становится особенно существенным, если рассматривается двумерное пространство общего вида (не R2), на котором нет выделенного базиса.
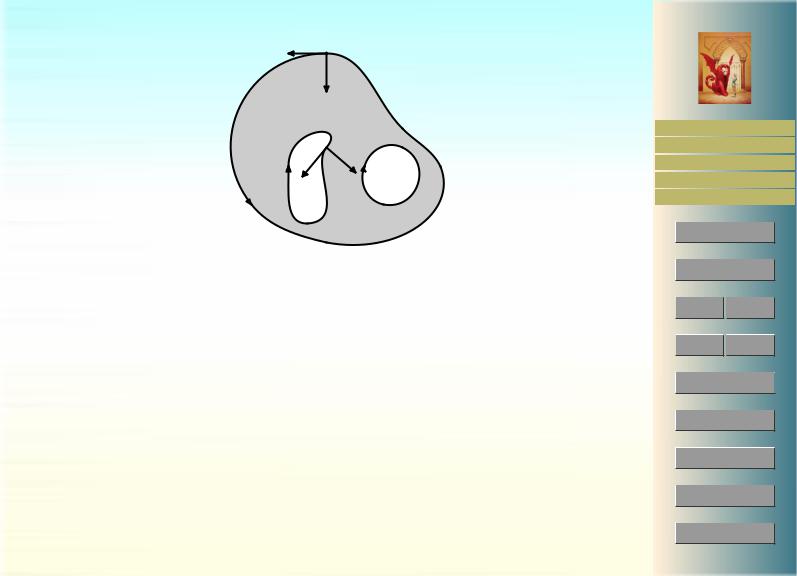
Определение 9.3. Граница ∂D называется положительно или согласованно ориентированной, если ее ориентация определяется единичным касательным вектором τ таким, что базис (τ, n), где n — вектор внутренней нормали к ∂D, является право ориентированным.
Определенности ради отметим, что вектор внутренней нормали n в точке P ∂D обладает тем свойством, что при всех достаточно малых положительных значениях ε точки P + εn лежат в области D.
Положительная ориентация границы может быть охарактеризована и при помощи вектора внешней нормали N = −n. Единичный касательный вектор τ будет определять согласованную ориентацию, если базис (N, τ) является право ориентированным. Это вытекает из свойств определителя:
τn = −n τ = N τ .
Всоответствии с теоремой Жордана10 о плоской замкнутой кривой, каждая непрерывная замкнутая кривая в R2 разделяет плоскость на две связные открытые компоненты
—внутреннюю и внешнюю. Из этой теоремы вытекает, что среди кривых i, которые
S
составляют границу ∂D (т.е. ∂D = i) есть одна, внутренняя компонента которой содержит все остальные кривые i. Она будет называться внешней границей, остальные кривые — внутренними.
10теорема Жордана является трудной топологической теоремой и принимается нами без доказательства
Кратные интегралы Интегралы на многообразиях
Приложения Предметный указатель Литература
Веб – страница
Титульный лист
JJ II
J I
Страница 121 из 245 
Назад
Полный экран
Закрыть
Выход
τ |
|
D |
n |
Γ2 |
Γ3 |
|
|
τ |
n |
Γ1
Рис. 19: К теореме Грина
Решим теперь вопрос с дифференциалом 1-формы. Прежде всего мы хотим каждой паре 1-форм (ω1, ω2) поставить в соответствие билинейную антисимметричную форму, которую будем обозначать ω1 ω2 и называть внешним произведением форм ω1 и ω2. Мы хотим, также, чтобы отображение
(ω1, ω2) 7→ω1 ω2
было билинейным и антисимметричным, т.е. чтобы
(ω1 + ω2) ω3 = ω1 ω3 + ω2 ω3 , ω1 (ω2 + ω3) = ω1 ω2 + ω1 ω3 ,
(aω1) ω2 = ω1 (aω2) = a(ω1 ω2) (a R)
и
ω ω = 0 ( ω).
Кратные интегралы Интегралы на многообразиях
Приложения
Предметный указатель
Литература
Веб – страница
Титульный лист
JJ II
J I
Страница 122 из 245 
Назад
Полный экран
Закрыть
Выход
Следствием этих свойств, как мы уже знаем, будет равенство
ω1 ω2 = −ω2 ω1 .
Свойства полилинейности и антикоммутативности позволяют ограничиться определением внешнего произведения лишь на базисных формах dx1 и dx2. Последние мы будем считать дуальными к векторам e1 и e2 ортонормированного базиса на плоскости. Поскольку на плоскости любая билинейная антисимметричная форма пропорциональна определителю векторов det, положим по определению
dx1 dx2 = det ,
откуда, в частности,
dx1 dx2(e1, e2) = e1 e2 = 1, ,
и более общо, |
|
v21 |
|
|
|
|
dx1 dx2(v1, v2) = v1 v2 |
= det(v1, v2) = |
v22 |
= det(dxi(vj)) , |
|||
|
|
|
v11 |
v12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где последний определитель следует понимать как определитель матрицы с элементами vij = dxi(vj). Как следствие, если ω1 и ω2 — произвольные дифференциальные 1-формы на плоскости, то
ω1 ω2(v1, v2) = det(ωi(vj)) .
Для доказательства этой формулы заметим, что обе части равенства являются линейными по ω1 и ω2 и антисимметричными, а следовательно, достаточно установить равенство на базисных формах, что и было сделано выше.
Наряду с операцией внешнего произведения 1-форм полезно ввести в некотором роде обратную операцию. Она называется внутренним произведением 2-формы ω на вектор a:
(ω, a) 7→ayω .
Кратные интегралы
Интегралы на многообразиях
Приложения
Предметный указатель
Литература
Веб – страница
Титульный лист
JJ II
J I
Страница 123 из 245 
Назад
Полный экран
Закрыть
Выход
Внутреннее произведение ayω является, по определению, 1-формой такой, что
ayω(v) = ω(a, v) .
Иначе говоря, если в 2-форме ω зафиксировать первую переменную, то получим 1-форму. Вычислим внутреннее произведение формы ω1 ω2, где ω1 , ω2 — 1-формы, на вектор a:
|
|
|
|
|
|
ω1 ω2(a, v) = |
ω1(a) |
ω1 |
(v) |
= ω1(a)ω2(v) − ω2(a)ω1(v) , |
|
ω2 |
(a) |
ω2 |
(v) |
||
|
|
|
|
|
|
|
|
|
|
|
|
откуда
ayω1 ω2 = ω1(a)ω2 − ω2(a)ω1 .
Данные структуры позволяют описать согласование ориентаций области D и ее границы ∂D в следующем виде. Во-первых, заметим, что ориентация может быть описана как выбор соответствующей дифференциальной формы. Действительно, именно задание формы dx1 dx2 (определитель) позволяет отделять базисы одной ориентации (правой) от базисов другой (левой). Поскольку это отделение зависит лишь от знака значения, мы можем вместо формы dx1 dx2 использовать и любую другую, если коэффициент пропорциональности между формами объема — положителен. Наоборот, форма dx2 dx1 будет задавать противоположную ориентацию. Аналогично и для граничной кривой ∂D, выбор ориентации, т.е. касательного вектора τ можно осуществлять дуальной к τ дифференциальной формой или любой другой 1-формой, значения которой на векторе τ положительны. Дуальную форму к вектору τ, задающему положительную ориентацию легко описать. Это форма
Nydx1 dx2 ,
где N — вектор внешней нормали. Действительно,
Nydx1 dx2(τ) = dx1 dx2(N, τ) = N τ = 1 .
Таким образом, 1-форма, определяющая согласованную ориентацию к ориентации dx1 dx2, равна
dx1(N)dx2 − dx2(N)dx1 = N1dx2 − N2dx1 ,
Кратные интегралы
Интегралы на многообразиях
Приложения
Предметный указатель Литература
Веб – страница
Титульный лист
JJ II
J I
Страница 124 из 245 
Назад
Полный экран
Закрыть
Выход
где N1, N2 — координаты вектора внешней нормали N. Это и есть дуальная форма к вектору τ
T1dx1 + T2dx2 ,
где T1, T2 — координаты единичного касательного вектора τ (T1 = −N2 , T2 = N1). Теперь мы готовы дать определение дифференциала 1-формы ω = f1dx1 + f2dx2:
Опр.
dω = df1 dx1 + df2 dx2
(предполагается, что функции f1, f2 имеют непрерывные производные). Это определение легко привести к координатному виду:
dω = |
∂f1 |
dx1 + |
∂f1 |
dx2 |
dx1 + |
∂f2 |
dx1 + |
|
∂f2 |
dx2 |
dx2 |
|
|
|
|
||||||
∂x1 |
∂x2 |
∂x1 |
∂x2 |
|
|
|
|
||||||||||||||
|
|
|
|
= |
∂f1 |
dx2 dx1 |
+ |
|
∂f2 |
|
dx1 |
dx2 = |
∂f2 |
− |
∂f1 |
dx1 |
dx2 . |
||||
|
|
|
|
∂x2 |
∂x1 |
|
∂x1 |
∂x2 |
|||||||||||||
Из этого представления и равенства |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
∂2f |
= |
|
|
∂2f |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
∂x1∂x2 |
|
|
∂x2∂x1 |
|
|
|
|
|
|
|
|||||
(производные предполагаются непрерывными) вытекает, что
d(df) = 0 .
Действительно, |
|
|
|
|
|
|
|
|
|
|
|
d(df) = d |
∂f |
dx1 + |
∂f |
dx2 |
= |
∂2f |
− |
∂2f |
dx1 |
dx2 |
= 0 . |
∂x1 |
∂x2 |
∂x1∂x2 |
∂x2∂x1 |
Это свойство и свойства дифференциала функции позволяют заключить, что определение дифференциала 1-формы не зависит от выбора системы координат. Действительно, если
Кратные интегралы
Интегралы на многообразиях
Приложения
Предметный указатель Литература
Веб – страница
Титульный лист
JJ II
J I
Страница 125 из 245 
Назад
Полный экран
Закрыть
Выход
ω = f1dy1 + f2dy2, но f1, f2, y1, y2 являются функциями координат x1, x2, то
|
∂yi |
|
∂yi |
|
|
|
∂yi |
|
∂yi |
|
|
|
∂yi |
|
∂yi |
|
|||
d fi |
|
dxj = d fi |
|
|
|
dxj = hdfi· |
|
+fi·d |
|
i dxj = dfi |
|
dxj +fid |
|
dxj , |
|||||
∂xj |
∂xj |
∂xj |
∂xj |
∂xj |
∂xj |
||||||||||||||
откуда по линейности |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
2 |
|
∂yi |
dxj |
2 |
|
|
∂yi |
dxj |
|
|
|
|
|
|
|
||
d(fidyi) = d fi j=1 |
|
∂xj |
= j=1 d fi ∂xj |
|
|
|
|
|
|
|
|||||||||
|
|
X |
|
X |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
= dfi |
2 |
∂yi |
dxj |
|
|
2 |
∂yi |
dxj = dfi dyi + fid(dyi) . |
|
||||||
|
|
|
|
j=1 |
∂xj |
+ fid j=1 |
∂xj |
|
|||||||||||
|
|
|
|
|
|
|
X |
|
|
|
|
X |
|
|
|
|
|
|
|
Ввиду d(dyi) = 0, получаем снова
dω = df1 dy1 + df2 dy2 .
Данное вычисление побуждает рассмотреть еще одну операцию над дифференциальными формами. Пусть θ : R2 → R2 является непрерывно дифференцируемым отображением. Будем считать, что в пространстве определения и в пространстве значений отображения θ системы координат (базисы) выбраны независимо. Координаты на плоскости определения назовем x1, x2, а на плоскости образов — y1, y2. Функцию θ будем описывать равенствами
(
y1 = y1(x1, x2) y2 = y2(x1, x2) .
Имея это ввиду, запишем θ : R2x → R2y.
Функция θ индуцирует отображение θ , которое форме в координатной плоскости R2y ставит в соответствие форму в координатной плоскости R2x — так называемый прообраз формы при отображении θ.
Кратные интегралы
Интегралы на многообразиях
Приложения
Предметный указатель Литература
Веб – страница
Титульный лист
JJ II
J I
Страница 126 из 245 
Назад
Полный экран
Закрыть
Выход
Рассмотрим, сначала, случай 0-формы, т.е. функции f : R2y → R. Ее прообраз определяется как суперпозиция:
θ f = f ◦ θ , θ f : R2x → R.
Пусть теперь ω является дифференциальной 1-формой на пространстве R2y. Она имеет вид
ω = f1dy1 + f2dy2 ,
где f1, f2 — непрерывные функции R2y → R. Прообразом формы ω при отображении θ называется форма на R2x
θ ω = θ f1 · θ dy1 + θ f2 · θ dy2 ,
где
Опр. |
∂yj |
|
∂yj |
|
θ dyj = d(θ yj) = d(yj ◦ θ) = |
|
dx1 + |
|
dx2 . |
∂x1 |
∂x2 |
Подчеркнем отличие здесь между dyj и d(yj ◦ θ). В первом случае это дифференциал независимой переменной yj, во втором — это дифференциал функции yj(x1, x2). Таким образом, смысл отображения θ элементарен: это замена переменных в записи дифференциальной формы — всюду переменные yj надо заменить на функции yj(x1, x2).
Это правило сохраняется и для 2-форм. Если ω — дифференциальная 2-форма на R2y, т.е. ω = fdy1 y2, то
Опр. |
θ dy2 . |
θ ω = θ f · θ dy1 |
Из определения легко вытекают следующие свойства отображения θ :
1.Если ω1 и ω2 — 1-формы на R2y, то θ (ω1 ω2) = θ ω1 θ ω2 .
2.Если ω — 1-форма на R2, то θ dω = dθ ω .
Кратные интегралы
Интегралы на многообразиях
Приложения
Предметный указатель
Литература
Веб – страница
Титульный лист
JJ II
J I
Страница 127 из 245 
Назад
Полный экран
Закрыть
Выход
Доказательство первого из свойств из соображений симметрии (точнее — антисимметрии) и билинейности достаточно провести для случая ω1 = fdy1 и ω2 = dy2. Но это в точности соответствует определению. Второе свойство в точности означает независимость определения дифференциала 1-формы от системы координат и было проверено выше.
Получим формулы для (θ ω)x(v) в случае 1-формы ω и (θ ω)x(v, w) в случае 2-формы.
(θ dyi)x(v) = |
∂y (x) |
|
∂y (x) |
dx2 (v) = |
|
∂y (x) |
|
∂y (x) |
|
|
|
|
||||||||
i |
|
dx1 + |
i |
|
|
i |
|
dx1 |
(v) + |
i |
dx2(v) |
|
||||||||
∂x1 |
∂x2 |
|
|
∂x1 |
|
∂x2 |
|
|||||||||||||
|
|
|
|
|
= |
∂yi(x) |
v |
1 |
+ |
∂yi(x) |
v = (θ0 (v)) |
i |
= dy |
(θ0 |
(v)) , |
|||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
∂x1 |
|
|
∂x2 |
2 |
x |
i |
x |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
откуда в случае 1-формы ω = f1dy1 + f2dy2 находим
(θ f1 · θ dy1 + θ f2 · θ dy2)x(v) = f1(θ(x))dy1(θx0 (v)) + f2(θ(x))dy2(θx0 (v)) ,
т.е.
(θ ω)x(v) = ωθ(x)(θx0 (v)) .
Подчеркнем, что θx0 (v) есть результат умножения матрицы Якоби θ0 в точке x на вектор v.
Далее, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ dy1 θ dy2 = |
∂y1 |
|
dx1 + |
|
∂y1 |
dx2 |
|
∂y2 |
dx1 + |
∂y2 |
dx2 |
|
||||||||
∂x1 |
|
|
∂x2 |
∂x1 |
∂x2 |
|
||||||||||||||
|
∂y1 |
|
∂y2 |
|
∂y1 |
|
∂y2 |
|
|
|
|
∂(y1, y2) |
|
|
||||||
= |
|
· |
|
− |
|
|
· |
|
dx1 dx2 = |
|
|
dx1 dx2 |
= det θ0 · dx1 dx2 . |
|||||||
∂x1 |
∂x2 |
∂x2 |
∂x1 |
∂(x1, x2) |
||||||||||||||||
Отсюда в случае 2-формы ω = fdy1 dy2
θ ω = f ◦ θ · det θ0 · dx1 dx2
и
(θ ω)x(v, w) = f(θ(x)) · det θ0(x) · dx1 dx2(v, w) = f(θ(x)) · det θ0(x) · v w .
Кратные интегралы Интегралы на многообразиях Приложения
Предметный указатель Литература
Веб – страница
Титульный лист
JJ II
J I
Страница 128 из 245 
Назад
Полный экран
Закрыть
Выход

Мы заканчиваем обсуждение формулы Грина определением интеграла от дифференциальной формы по ориентированной области. Если ω = fdx1 dx2 и область D ориентирована заданием формы dx1 dx2, то
ZZ
Опр.
ω = f .
DD
Здесь справа стоит обычный двукратный интеграл от функции f. Таким образом, в случае правой ориентации
|
DZ f(x1, x2)dx1 dx2 = DZ |
f(x1, x2)dx1dx2 . |
|||||||
При изменении ориентации интеграл от формы изменит знак. |
|||||||||
Таким образом, формула Грина принимает вид |
f1dx1 + f2dx2 |
||||||||
|
Z |
∂x1 |
− ∂x2 |
dx1dx2 = Z |
|||||
|
|
∂f2 |
|
∂f1 |
|
|
|
|
|
|
D |
|
|
|
|
∂D |
|
|
|
или (в стандартных обозначениях) |
|
|
∂x − |
|
|
||||
Z |
P (x, y)dx + Q(x, y)dy = Z |
∂y |
dxdy . |
||||||
|
|
|
|
|
|
|
∂Q |
∂P |
|
∂D |
|
|
|
|
D |
|
|
|
|
Для доказательства формулы Грина нам понадобится следующие варианты формул замены переменных в криволинейном и кратном интегралах. Пусть — ориентированная гладкая кривая с параметризацией γ : [a, b] → R2 и θ : R2 → R2 — непрерывно дифференцируемое отображение. Тогда θ( ) — тоже гладкая кривая с параметризацией θ ◦ γ (чем задается ее ориентация). В случае 1-формы ω = f1dx1 + f2dx2 находим
Z |
|
b |
b |
Z |
|
Z |
|
θ ω = Z (θ ω)γ(t)(γ0(t)) dt = Z |
ωθ(γ(t))(θγ0 (t)(γ0(t))) dt = |
ωθ◦γ((θ ◦ γ)0) = |
ω . |
||||
|
a |
a |
|
[a,b] |
|
θ( ) |
|
Кратные интегралы
Интегралы на многообразиях
Приложения
Предметный указатель
Литература
Веб – страница
Титульный лист
JJ II
J I
Страница 129 из 245 
Назад
Полный экран
Закрыть
Выход
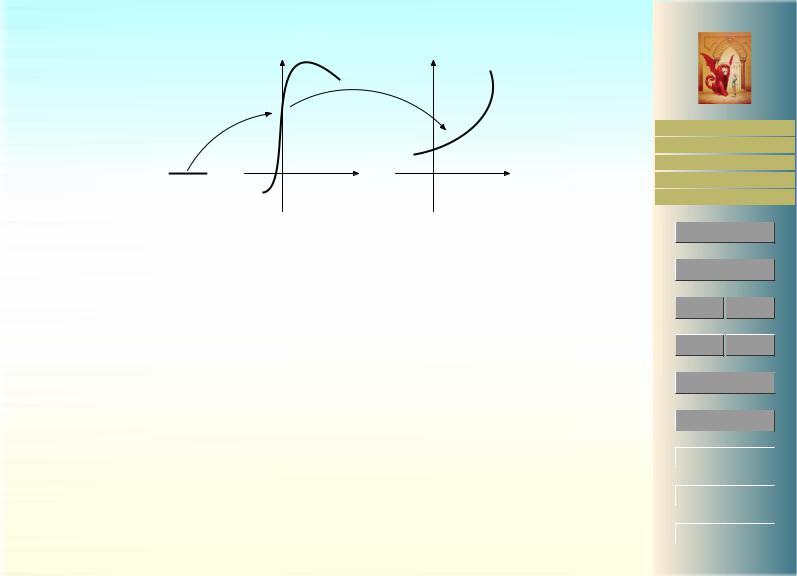
Γ
θ
γ
θ(Γ)
ab
Рис. 20: Образ кривой при отображении θ
Аналогично, в случае 2-формы ω = fdx1 dx2 и жордановой области D
Z |
θ ω = Z |
f ◦ θ det θ0 · dx1 dx2 = Z |
f ◦ θ · det θ0 = |
Z |
f = |
Z |
ω , |
D |
D |
D |
|
θ(D) |
|
θ(D) |
|
где мы воспользовались формулой замены переменных в кратном интеграле. Таким образом, имеют место формулы замены переменных для форм:
Кратные интегралы
Интегралы на многообразиях Приложения
Предметный указатель
Литература
Веб – страница
Титульный лист
JJ II
J I
Страница 130 из 245 
ZZ
|
θ ω = |
|
ω , |
|
Назад |
|
|
θ( ) |
(9.2) |
|
|||
|
||||||
θ ω = |
ω , |
Закрыть |
||||
Z |
Z |
|||||
|
|
|
|
|
Полный экран |
|
D |
|
θ(D) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выход |
|
|
|
|
|
|
|