

3.1.9. Использование параллельных портов
в начало
Наиболее распространенным применением LPT-порта является, естественно, подключение принтера. Не вдаваясь в проблемы установки и использования программных драйверов, остановимся на аппаратных аспектах – режиме порта и кабеле подключения. Практически все принтеры могут работать с портом в режиме SPP, но применение расширенных режимов дает дополнительные преимущества:
- Двунаправленный режим (Вi-Di) не повышает производительность, но дает дополнительные возможности для сообщения состояния и параметров принтера. Скоростные режимы (Fast Centronics) существенно повышают производительность практически любого принтера (особенно лазерного), но могут потребовать более качественного кабеля (см. ниже). От принтера этот режим не требует каких-либо дополнительных “интеллектуальных” способностей.
- Режим ЕСР потенциально самый эффективный, и он имеет системную поддержку во всех вариантах Windows. Однако он реализует свои способности (включая аппаратную компрессию) не на всех принтерах. Из распространенных семейств ЕСР поддерживают принтеры НР DeskJet моделей 6xx, LaserJet начиная с 4-го, современные модели фирмы Lexmark. Требует применения кабеля, по частотным свойствам соответствующего IEEE 1284.
3.1.10. Параллельный порт и РпР
в начало
Большинство современных периферийных устройств, подключаемых к LPT-порту, поддерживает стандарт 1284 и функции РпР. Для поддержки этих функций компьютером с аппаратной точки зрения достаточно иметь контроллер интерфейса, поддерживающий стандарт 1284. Если подключаемое устройство поддерживает РпР, оно по протоколу согласования режимов 1284 способно “договориться” с портом, представляющим “интересы” компьютера, о возможных режимах обмена. Далее, для работы РпР подключенное устройство должно сообщить операционной системе все необходимые сведения о себе. Как минимум это идентификаторы производителя, модели и набор поддерживаемых команд. Более развернутая информация об устройстве может содержать идентификатор класса, подробное описание и идентификатор устройства, с которым обеспечивается совместимость, В соответствии с принятой информацией операционная система может предпринять действия по установке требуемого программного обеспечения поддержки данного устройства.
3.2. Последовательные интерфейсы: com-порт
в начало
Последовательный интерфейс для передачи данных в одну сторону использует одну сигнальную линию, по которой информационные биты передаются друг за другом последовательно. Такой способ передачи и определяет название интерфейса и порта, его реализующего. Эти названия соответствуют английским терминам Serial Interface и Serial Port (иногда в неудачном переводе их называют “серийными”, что звучит довольно странно). Последовательная передача данных может осуществляться как в асинхронном, так и синхронном режимах.
При асинхронной передаче каждому байту предшествует старт-бит, сигнализирующий приемнику о начале очередной посылки, за которым следуют биты данных и, возможно, бит паритета (контроля четности,). Завершает посылку стоп-бит, гарантирующий определенную выдержку между соседними посылками (рисунок 3.4).
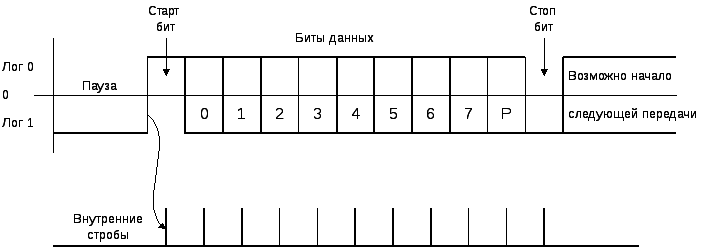
Рис.3.4. Формат асинхронной передачи
Старт-бит следующего посланного байта может посылаться в любой момент после окончания стоп-бита, то есть между передачами возможны паузы произвольной длительности. Старт-бит, имеющий всегда строго определенное значение (лог. 0), обеспечивает простой механизм синхронизации приемника по сигналу от передатчика. Подразумевается, что приемник и передатчик работают на одной скорости обмена, измеряемой в количестве передаваемых бит в секунду. Внутренний генератор синхронизации приемника использует счетчик-делитель опорной частоты, обнуляемый в момент приема начала старт-бита. Этот счетчик генерирует внутренние стробы, по которым приемник фиксирует последующие принимаемые биты. В идеале эти стробы располагаются в середине битовых интервалов, что обеспечивает возможность приема данных и при некотором рассогласовании скоростей приемника и передатчика. Нетрудно заметить, что при передаче 8 бит данных, одного контрольного и одного стоп-бита предельно допустимое рассогласование скоростей, при котором данные будут распознаны верно, не может превышать 5%. С учетом фазовых искажений (затянутых фронтов сигнала) и дискретности работы внутреннего счетчика синхронизации реально допустимо меньшее отклонение частот. Чем меньше коэффициент деления опорной частоты внутреннего генератора (тем выше частота передачи), тем больше погрешность привязки стробов к середине битового интервала, и, следовательно, требования к согласованности частот более строгие. Также, чем выше частота передачи, тем больше влияние искажений фронтов на фазу принимаемого сигнала. Такое «дружное» действие этих двух факторов приводит к повышению требований согласованности частот приемника и передатчика с ростом частоты обмена.
Для асинхронного режима принят ряд стандартных скоростей обмена: 50, 75, 110, 150,300,600, 1200,2400,4800,9600, 19200, 38400, 57600 и 115200 бит/с. Иногда вместо единицы измерения “бит/с” используют “бод” (baud), но в данном случае, при рассмотрении двоичных передаваемых сигналов, это некорректно. В бодах принято измерять частоту изменения состояния линии, а при недвоичном способе кодирования (широко применяемом в современных модемах) в одном и том же канале связи скорости передачи бит (бит/с) и изменения сигнала (бод) могут отличаться в несколько раз.
Количество бит данных может составлять 5, 6, 7 или 8 (5- и 6-битные форматы малораспространены). Количество стоп-бит может быть 1, 1,5 и 2 (“полтора бита” подразумевает, естественно, только длительность стопового интервала).
Асинхронный обмен в РС реализуется с помощью СОМ-порта с использованием протокола RS-232C.
Синхронный режим передачи предполагает постоянную активность канала связи. Посылка начинается с синхробайта, за которым вплотную следует поток информационных бит. Если у передатчика нет данных для передачи, он заполняет паузу непрерывной посылкой байтов синхронизации. Очевидно, что при передаче больших массивов данных накладные расходы на синхронизацию в данном режиме обмена будут ниже, чем в асинхронном. Однако в синхронном режиме необходима внешняя синхронизация приемника с передатчиком, поскольку даже малое отклонение частот приведет к быстро накапливающейся ошибке и искажению принимаемых данных. Внешняя синхронизация возможна либо с помощью отдельной линии для передачи сигнала синхронизации, либо с использованием самосинхронизирующего кодирования данных (например, манчестерский код или NRZ), при котором на приемной стороне из принятого сигнала могут быть выделены и импульсы синхронизации. В любом случае синхронный режим требует либо дорогих линий связи, либо дорогого оконечного оборудования (а может, и того и другого).