

Рисунок 8.4
Избыточная работа движущих сил расходуется на разгон машинного агрегата (на накопление кинетической энергии).
|
При установившемся движении ω = |
ω о , соответственно |
||||||||||
|
|
|
|
J |
пр |
ω |
2 |
|
J |
пр |
ω 2 |
|
|
T − T |
= |
|
|
|
|
− |
|
o |
= 0 , |
||
|
|
|
|
|
|
|
|
|
||||
|
o |
|
|
|
2 |
|
|
|
2 |
|
||
или |
Ад = Ac , т.е. работа движущих сил расходуется на преодоление сил |
|||||||||||
сопротивления полностью. |
|
|
|
|
|
|
|
|
|
|
|
|
|
При выбеге ω < ω о , соответственно |
|
|
|
|
|||||||
|
|
|
|
J |
пр |
ω |
2 |
|
J |
пр |
ω 2 |
|
|
T − T |
= |
|
|
|
|
− |
|
o |
< 0 , |
||
|
|
|
|
|
|
|
|
|
||||
|
o |
|
|
|
2 |
|
|
|
2 |
|
||
|
Ад < Ac . Машинный |
|
|
|
|
|
|
|
||||
или |
|
агрегат |
работает за счет накопленной |
|||||||||
кинетической энергии (по инерции). |
|
|
|
|
|
|
|
|||||
|
8.5 Уравнение движения |
|
|
|
|
|
|
|
|
|
|
|
|
Уравнение движения машинного агрегата в любой момент можно |
|||||||||||
выразить в дифференциальной форме из выражения (8.21) |
||||||||||||
|
|
dT = dA , |
|
|
(8.22) |
|||||||
или
æ |
J |
пр |
w 2 |
ö |
|
(М д - Мс )dj , |
dç |
|
|
÷ |
= |
||
|
2 |
|||||
ç |
|
÷ |
|
|
||
è |
|
|
|
ø |
|
|
где Мд – приведенный момент движущих сил; Мс – приведенный момент сил сопротивления.
Преобразуем уравнение движения
d |
æ |
|
w 2 |
ö |
|
|
|
ç |
Jпр |
|
÷ |
= |
М д - Мс . |
|
ç |
2 |
÷ |
|||
dj è |
|
ø |
|
|
||
Рассмотрим левую часть
|
d |
æ |
|
w 2 ö |
|
|
d(w 2 / 2) |
|
|
w 2 |
dJпр |
|
||||||||
|
|
|
ç |
Jпр |
|
÷ |
= |
J |
пр |
|
|
|
+ |
|
× |
|
|
|
, |
|
|
dj |
2 |
dj |
|
|
2 |
dj |
|||||||||||||
|
ç |
|
÷ |
|
|
|
|
|
|
|
|
|
||||||||
где |
|
|
è |
|
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d(w 2 / 2) |
|
|
d(w 2 / 2) |
dw |
|
dw dt |
|
dw 1 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dj |
|
= |
|
dw |
|
× |
dj |
= w |
dt |
× dj |
|
|
= w |
dt × w |
||||||
|
|
|
|
|
= e = j . |
|||||||||||||||
Уравнение движения в конечном виде будет |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
w 2 |
dJпр |
|
Мд - |
Мс . |
|
|
|
|
||||||
|
|
|
|
|
|
|
× |
|
= |
|
|
|
(8.23) |
|||||||
|
|
|
|
Jпрj + |
|
2 |
dj |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Для машин ротационного типа при Jпр = const, второе слагаемое в левой части равно нулю и уравнение движения машинного агрегата
упрощается |
|
Jпрϕ = М д − Мс . |
(8.24) |
Функция Мд определяется механической характеристикой электродвигателя.
Если в расчетах принять Мд = const, то расчет называется без учета характеристик электродвигателя.
При учете характеристик электродвигателя движущий момент является функцией угловой скорости (рисунок 2.26)
Мд = М д (ω 1 ) .
8.6Неравномерность хода машинного агрегата
Приведенный момент инерции (8.13) и приведенный момент сопротивления движению (8.18) является величинами переменными, т.е. функциями положения механизма
Jпр = Jпр(ϕ ),
Mc = Mc (j ).

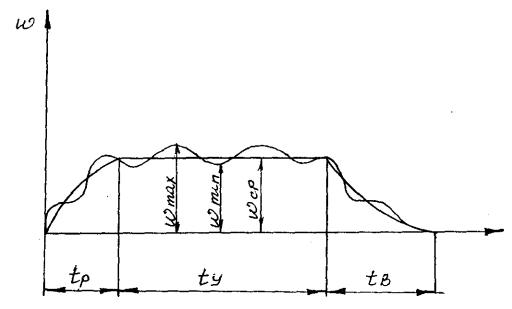
В результате этого движение машинного агрегата характеризуется периодическим изменением скорости, т.е. неравномерностью как при разбеге, так и при установившемся движении (рисунок 8.4).
Рассмотрим установившееся движение. Скорость звена приведения
колеблется относительно ω ср от ω max до ω min .
Характеристикой неравномерности хода машин является коэффициент неравномерности движения
d |
= |
ω max − |
ω min |
, |
|
(8.25) |
|||||||
|
|
|
|||||||||||
|
|
|
|
w ср |
|
|
|
|
|
||||
где ω ср - средняя скорость звена приведения. |
|
||||||||||||
w ср = |
ω max + |
ω min |
. |
(8.26) |
|||||||||
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
Величина δ зависит от технологических свойств машины. |
|
||||||||||||
Для металлорежущих станков δ = |
|
|
0,02...0,05 . |
|
|||||||||
Прессы и ножницы δ = 0,10...0,15 . |
|
|
|
|
|
|
|||||||
В курсовых проектах величина δ |
|
задана в исходных данных. Сложим и |
|||||||||||
вычтем два равенства (8.25) и (8.26) |
|
|
|
|
|
|
|
|
|
|
|
||
δ ω ср = |
ω max − ω min |
|
|||||||||||
±2w ср = |
w max + |
w min |
|
||||||||||
После сложения получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
1 + |
|
|
d |
ö |
|
|
|
|
|
||
w max = |
w ср ç |
|
|
|
÷ |
|
, 1/с. |
(8.27) |
|||||
|
2 |
|
|||||||||||
|
è |
|
|
|
ø |
|
|
|
|
|
|||
После вычитания получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
w min = |
w ср |
æ |
- |
|
d |
ö |
, 1/с. |
(8.28) |
|||||
ç 1 |
2 |
÷ |
|||||||||||
|
|
|
è |
|
|
ø |
|
|
|
|
|||
Пример – Дано: ωср = 100 1 |
с |
, |
δ = 1 . |
|
|
|
|
|
|
|
|
Находим: |
|
5 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
ωmax = ωср (1 + |
δ) = 100(1 + |
|
1 |
|
) = 110 |
1 |
с |
, |
|||
10 |
|||||||||||
|
2 |
|
|
|
|
||||||
ωmin = ωср (1 - |
δ) = 100(1 - |
1 |
) = 90 1 |
с |
. |
|
|||||
10 |
|
||||||||||
|
2 |
|
|
|
|
|
|||||
Рассмотрим движение машинного агрегата при Jпр = const, считая, что экстремальные значения кинетической энергии соответствуют положениям механизма со скоростями ωmax и ωmin звена приведения.
Уравнение движения (8.21) будет
|
(1/ 2)Jпрω max2 − (1/ 2)Jпрω min2 = Amax , |
|
|
|
||||||
|
Jпр = |
|
2 |
Amax |
|
|
|
|||
или |
|
|
|
|
|
. |
|
|
|
|
ω |
2 |
2 |
|
|
|
|||||
|
|
max − ω min |
|
|
|
|||||
|
С учетом (8.27) и (8.28) имеем |
|
|
Amax |
|
|
|
|||
|
Jпр = |
|
|
|
(8.29) |
|||||
|
|
|
|
. |
|
|
||||
|
|
|
2 |
|
|
|||||
|
|
|
|
|
δ ω ср |
|
|
|
||
|
Откуда |
|
|
|
|
δ |
= |
Amax |
. |
|
|
|
|
|
|
2 |
|||||
|
|
|
|
|
|
|
|
|
Jпрω ср |
|
(8.30) |
Коэффициент неравномерности движения тем меньше, чем больше Jпр |
|||||||||
|
||||||||||
и ω ср и чем меньше максимальная величина избыточной работы |
Amax . |
|||||||||
Практически требуемую неравномерность движения δ можно обеспечить увеличивая Jпр, т.е. установкой дополнительной так называемой маховой массы. Такую массу оформляют в виде маховика - массивного диска или колеса со спицами, который выполняет роль механического аккумулятора энергии.
Расчет момента инерции маховых масс оказывается простым, если принять Jпр = const .
Расчетное значение Jпр для обеспечения заданного коэффициента неравномерности - δ определяется по выражению (8.29).
Если приведенный момент инерции машинного агрегата - Jпр.маш. меньше расчетного, то необходимо установить маховик.
Момент инерции маховика
Jмахов. = Jпр − Jпр.маш. .
По величине Jмахов. определяют размеры маховика, обеспечивающего заданную неравномерность движения.