

16,17,19
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ ГОУ ВПО «Вятский государственный университет»
Электротехнический факультет
Кафедра физики
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ
Методические указания к лабораторной работе
Дисциплина "Физика" для всех специальностей
Киров – 2009
УДК 531.38(07) В812
Рецензент : доктор технических наук, профессор, зав. кафедрой теоретической и строительной механики ВятГУ А.В. Алешкин
Вращательное движение: Лабораторная работа/ Е.А. Маратканова, В.А. Кузьмин. – Киров: Изд-во ВятГУ, 2009. – 24 с.
Компьютерный набор С.Г. Крившенко
_________________________________________________________________
610000, г. Киров, ул. Московская, 36.
© ГОУ ВПО «Вятский государственный университет», 2009
3 |
|
|
Содержание |
|
|
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ |
.. 5 |
|
МОМЕНТ СИЛЫ ..................................................................................................... |
|
7 |
Лабораторная работа №16 ..................................................................................... |
|
11 |
ЗАДАНИЕ 1. Определение момента инерции J0 ненагруженного диска ........... |
13 |
|
ЗАДАНИЕ 2. Определение момента инерции твердого тела .............................. |
14 |
|
ЗАДАНИЕ 3. Проверка теоремы Штейнера ......................................................... |
|
14 |
Контрольные вопросы ........................................................................................... |
|
15 |
Лабораторная работа № 17 .................................................................................... |
|
16 |
ЗАДАНИЕ 1. Определение момента инерции J z 0 |
системы шкив-крестовина без |
|
грузов 3 ................................................................................................................... |
|
18 |
ЗАДАНИЕ 2. Определение момента инерции J z1 |
системы шкив-крестовина с |
|
грузами 3................................................................................................................. |
|
19 |
ЗАДАНИЕ 3. Проверка основного закона динамики вращательного движения 19
Контрольные вопросы ........................................................................................... |
20 |
Лабораторная работа № 19 .................................................................................... |
21 |
ЗАДАНИЕ............................................................................................................... |
24 |
Контрольные вопросы ........................................................................................... |
25 |
Библиографический список................................................................................... |
25 |
Приложение............................................................................................................ |
26 |

4
Вращательное движение – это такое движение тела, при котором точки тела движутся в параллельных плоскостях и описывают окружности, центры кото-
рых лежат на одной прямой, называемой осью вращения. |
|
|
Кинематические |
характеристики вращательного движения– |
угловая |
r |
r |
|
скорость w и угловое ускорение e . |
|
|
Угловая скорость характеризует быстроту вращения тела. Угловой скоро- |
||
|
r |
|
|
w |
первой |
стью вращательного движения называется вектор , численно равный |
||
æ |
dj ö |
r |
||
производной от угла поворота j по времени t çw = |
|
÷ |
. Направление w опре- |
|
dt |
||||
è |
ø |
|
||
деляется правилом правого буравчика: вращательное движение рукоятки бурав-
чика совпадает с направлением вращения, а поступательное движение буравчика
r
указывает направление w .
Быстрота изменения угловой скорости характеризуетсяугловым ускорением er. Угловое ускорение er – вектор, численно равный первой производной
|
æ |
dw |
|
d2j ö |
|||
|
çe = |
|
= |
|
|
|
÷ |
|
|
|
|
2 |
|||
по времени от угловой скорости ç |
dt |
|
|
dt |
÷. |
||
|
è |
|
|
|
ø |
||
r |
|
|
|
|
|
r |
|
Направление вектора e |
совпадает с направлением w при возрастании уг- |
||||||
|
|
|
|
|
|
|
r |
ловой скорости и противоположно направлению w при убывании угловой скоро- |
|||||||
сти |
|
|
|
|
|
|
|
Равномерное |
Ускоренное |
|
|
Замедленное |
|||
вращение |
вращение |
|
|
|
вращение |
||
r |
r |
r |
= 0 |
d > 0 |
d < 0 |
|
> 0 |
< 0 |
Рис. 1
r
Угловая скорость w и угловое ускорение направлены вдоль оси вращения
тела.
Связь между угловой скоростью, угловым ускорением и линейными скоростями и ускорениями определяется следующими соотношениями:
r |
é |
r |
r |
ù |
r |
r r |
|
M 0 = |
|
× F |
J |
= [w × r ], |
at = e × r , |
||
ër |
û |
||||||
где at – тангенциальное ускорение тела; |
|
||||||

|
|
|
|
|
|
|
5 |
|
|
a = w2 |
× r , где |
a |
n |
– нормальное ускорение тела; |
|
||||
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
a = a2 |
+ a2 |
=r × e2 +w4 |
, |
||
|
|
|
|
|
n |
t |
|
|
|
где a - модуль вектора полного линейного ускорения тела:
r |
r r |
a |
= an + at . |
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Момент инерции J – мера инертности тела при вращательном движении. Момент инерции представляет собой скалярную физическую величину, численно равную сумме масс материальных точек тела, умноженных на квадрат их расстояния до оси вращения:
J = åmi × ri2 ,
где mi и ri – масса и расстояние до оси вращения достаточно малых частей тела.
Как видно из определения, момент инерции есть величина аддитивная: момент инерции тела равен сумме моментов инерции его частей; момент инерции системы равен сумме моментов инерции отдельных тел.
Момент инерции тела зависит от:
1)распределения массы в теле (тело может быть неоднородно);
2)размеров тела;
3)формы тела;
4)положения оси вращения.
Для тела с непрерывным распределением массы следует воспользоваться интегральным представлением момента инерции
J = òr2dm = òr 2 rdV ,
где r – плотность вещества тела; dV – бесконечно малый объем тела; dm –масса бесконечно малого объема тела. Пределы интегрирования определяются формой
иразмерами тела.
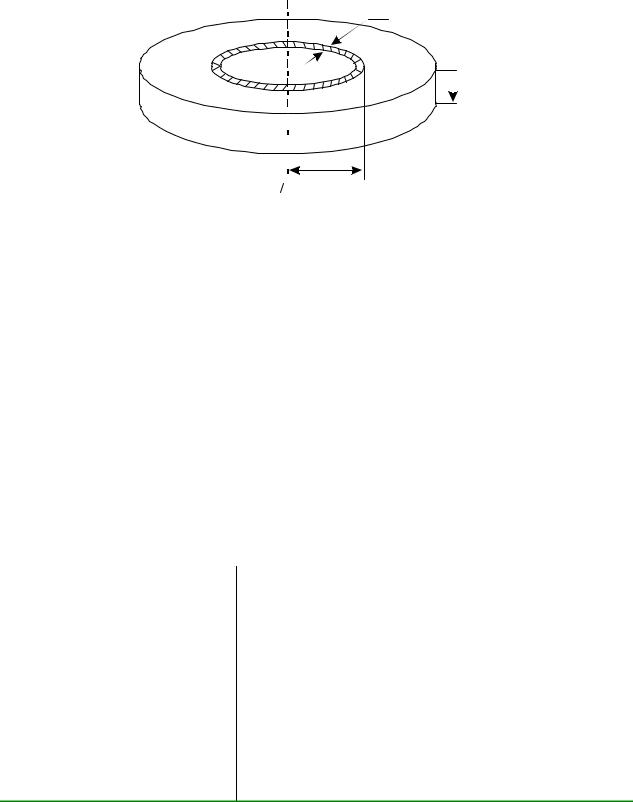
Вкачестве примера найдем момент инерции однородного диска относительно оси 00', перпендикулярной плоскости диска и проходящей через его центр(рис. 2).
Разобьем диск на кольцевые слои толщиной dr . Объем такого слоя,
dV = b × 2p × rdr ,
момент инерции диска
R |
R |
r4 |
|
|
J = r=òr2dV r òr2b × 2p × r dr= |
2p ×b × r=òr3dr 2p ×b × r |
, |
||
4 |
||||
0 |
0 |
|
||
|
|
где b – толщина диска; R – его радиус.
6
O 
dr
 в
в
O |
|
r |
||
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
|
Рис. 2 |
|||
|
|
|||
Масса диска m = r ×b ×p × R2 , следовательно, J = |
1 |
× mR2 . |
||
|
||||
2
Аналогично получены формулы для моментов инерции тел простейшей формы, приведенные в табл. 1.
Во всех случаях, рассмотренных в таблице, ось вращения проходит через центр масс тела.
Центр масс или центр инерции– это геометрическая точка С, положение
которой характеризует |
распределение масс |
в |
теле |
или |
механической системе, а |
||||||
|
|
r |
|
1 |
r |
|
|
r |
|
|
|
радиус-вектор которой |
равен ri |
= |
|
åmi × ri |
,- |
где mi |
; ri |
- масса материальной |
|||
m |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
точки и радиус-вектор этой точки соответственно. |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
Таблица 1 |
||
Характеристики тела |
Положение оси вращения |
Момент инерции |
|
||||||||
Полный тонкостенный цилиндр или обруч радиуса R и массой т Сплошной цилиндр или
диск радиуса R и массой m
Шар радиуса R и массой m
Тонкий однородный стержень длиной l и массой m
ось симметрии |
J = mR2 |
|||||
ось симметрии |
J = |
1 |
mR2 |
|||
|
||||||
|
2 |
|
|
|||
ось проходит через центр |
J = |
2 |
mR2 |
|||
шара |
|
|||||
5 |
|
|
||||
ось перпендикулярна |
J = |
1 |
ml2 |
|||
стержню и проходит через |
||||||
|
||||||
его середину |
12 |
|
||||
|
|
|
|
|
||