

Кработа-ВТиИТ
.pdf1
ЗАДАНИЯ И МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ ПО ВЫПОЛНЕНИЮ КУРСОВОГО ПРОЕКТА
Данное методическое пособие предусматривает методические указания по синтезу микропрограммного автомата, выполняющего функцию управляющего устройства дискретной системы автоматического управления, с использованием принципа жесткой логики. Его выполнение осуществляется после изучения курса и является завершающим этапом обучения студента по дисциплине. Он требует знаний элементной базы цифровых ИМС и знакосинтезирующих индикаторов.
Целями КП являются закрепление полученных знаний и более глубокое изучение предмета, развитие навыков синтеза электрических принципиальных схем дискретных устройств автоматики, приобретение практических навыков минимизации схем с целью выбора более рациональных и экономичных вариантов схемных решений.
Любая автоматическая система проектирования должна основываться на использовании той или иной формальной модели. Для дискретных устройств автоматики формальной моделью служит конечный автомат. На его основе разработан ряд формальных методов синтеза дискретных устройств, широко используемых в настоящее время. Проектирование дискретных устройств на основе формализованных методов теории автоматов позволяет существенно сократить сроки их проектирования и повысить качество разработки.
Методическое пособие дает представление о принципах построения дискретных устройств, содержит методику синтеза, позволяет понять задачи, возникающие при проектировании, содержит разбор примера; в приложении пособия приводятся справочные материалы по цифровым микросхемам, которые могут быть использованы при проектировании. Кроме того, методическое пособие содержит задание на КП, варианты исходных данных, порядок выполнения, требования к оформлению. Материал пособия сформирован так, чтобы его в основном было достаточно для выполнения КП. Список литературы приведен в минимальном объеме, в него включена только та литература, в которой содержатся основные доказательства, обоснования описанных в пособии методов и прилагаемых для использования в процессе проектирования решений, а так же справочный материал. Указанная литература может быть использована для более глубокой проработки вопросов, вошедших в рассматриваемый вариант курсового проекта.
2
1. ОСНОВЫ ПРОЕКТИРОВАНИЯ ДИСКРЕТНЫХ УСТРОЙСТВ
АВТОМАТИКИ
1.1. Принципы построения дискретных устройств автоматики
Структура системы автоматического управления (САУ) состоит из двух основных узлов: объекта управления (ОУ) и управляющего устройства (УУ).
Под управлением понимается процесс воздействия на ОУ с целью обеспечения требуемого течения процессов в ОУ или требуемого изменения его состояния. Структурная схема САУ приведена на рис. 1.1. Состояние ОУ характеризуется величинами х1…хn. От УУ на вход ОУ поступают управляющие воздействия y1…ym. На вход УУ подаются задающие воздействия g1…gk, содержащие информацию о требуемом состоянии ОУ. Дискретное управляющее устройство координирует действия объекта управления; оно вырабатывает в определенной временной последовательности управляющие сигналы, под воздействием которых в ОУ выполняются определенные действия. Необходимо уяснить и запомнить разницу между управляющим воздействием и управляющим сигналом.
|
|
|
|
|
|
|
|
Таким |
|
образом, |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
У1 |
|
|
|
функционирование |
|
ОУ |
||
|
|
|
|
|
|
распадается |
на |
некоторую |
|||
|
|
|
У2 |
|
Х1 |
|
|||||
|
|
УУ |
|
|
последовательность |
|
|
||||
|
|
. |
|
. |
|
|
|
||||
g1 |
|
. |
|
. |
|
элементарных |
действий, |
каждое |
|||
|
|
ОУ |
|
||||||||
. . . |
|
. |
Хn |
|
из которых называется операцией. |
||||||
|
Уm |
|
|
||||||||
g2 |
|
|
|
|
В |
определенные |
тактовые |
||||
|
|
|
|
|
|||||||
|
|
|
Рис. 1.1 |
|
|
|
периоды одновременно |
могут |
|||
|
|
|
|
|
|
выполняться несколько операций. |
|||||
|
|
|
|
|
|
|
|||||
Такая совокупность одновременно выполняемых операций называется командой, а весь набор команд - программой. Вследствие того, что управляющее устройство определяет программу, т.е. какие и в какой временной последовательности должны выполняться операции, оно получило название
автомат (конечный автомат КА).
Формирование управляющих сигналов у1…уm для выполнения определенных команд может зависеть от состояния объекта управления, определяемого сигналами х1…хn, которые передаются по определенным цепям с соответствующих выходов ОУ на входы конечного автомата. Управляющие сигналы, также могут зависеть от внешних сигналов g1…gk.
1.2.Два подхода в построении управляющих устройств
Внастоящее время существуют два принципиально различных подхода
впроектировании автоматов: использование принципа схемной (жесткой)
логики и принципа программируемой (гибкой) логики.
Впервом случае, т.е. при использовании принципа схемной логики, в процессе проектирования подбирается некоторый набор цифровых микросхем
3
(обычно малой и средней степени интеграции) и определяется такая схема соединения их выводов, которая обеспечивает требуемое функционирование.
Устройства, построенные по этому принципу, способны обеспечивать наивысшее быстродействие при заданном типе технологии ИМС. Недостаток этого принципа построения УУ состоит в трудности использования интегральных ИМС большой и сверхбольшой степени интеграции (БИС и СБИС). Это связано с тем, что для различных САУ потребуются различные БИС, которые окажутся узкоспециализированными. Число используемых БИС окажется большим, а потребность в каждом типе – низкой. Это может привести к экономической нецелесообразности выпуска их промышленностью. Кроме того, в устройстве, построенному по принципу жесткой логики, всякое изменение или расширение выполняемых функций влечет за собой демонтаж устройства и монтаж его по новой схеме.
Принцип программируемой логики предполагает построение УУ с использованием микропроцессорного устройства (БИС) – универсальное устройство, содержащее внутреннюю память. Функционирование МПУ обеспечивается введенной в его память программой, поэтому оно способно выполнять самые разнообразные функции. Благодаря использованию принципа программируемой логики любое изменение функционирования УУ сводится к замене программы.
Достоинства цифровых ИМС и МПУ обеспечили широкое использование цифровых методов в различных технических направлениях.
Рассмотрим последовательность проектирования дискретного управляющего устройства (ДУУ) на примере решения задачи.
4
ЗАДАЧА
Разработать электрическую принципиальную схему ДУУ, используя принцип жесткой логики, на ИМС серий КР1533, К555, К155, включающее реле, если сработало 10 датчиков из 13, а также устройство индикации номера контролируемого датчика, при этом преобразователь кода синтезировать на ИМС логики тех же серий.
1.3. Этапы проектирования дискретного управляющего устройства по принципу жесткой логики
1.3.1. Построение структурной схемы ДСАУ и формализация задачи
На этом этапе проектирования необходимо построить структурную схему ДСАУ, определить назначение ее блоков, входных и выходных сигналов, произвести их формальное описание, разобраться в принципе работы устройства в целом, во взаимодействии блоков схемы, т.е. определить место ДУУ в системе автоматического управления.
На рис.1.2 приведена структурная схема ДСАУ, состоящая из четырех блоков. ДУУ – управляющее устройство, принципиальную схему которого требуется разработать, формирующее управляющие сигналы (команды) Y1 – Y5, воздействующие на ОУобъект управления (в соответствии с техническим заданием его схема не разрабатывается), и в результате чего автоматически решается вопрос формирования сигнала для реле. Управляющие сигналы g1 и g2 задают количество контролируемых датчиков и количество сработавших датчиков, необходимых для срабатывания реле (в данном случае 13 и 10 соответственно).
|
|
g1 |
g2 |
С |
|
|
Сигналы |
датчиков |
также |
|||
|
|
|
являются |
|
|
управляющими |
||||||
|
|
|
|
|
|
|
|
|||||
|
Х1 |
|
|
|
|
воздействиями. |
|
|
|
Объект |
||
|
Х2 |
|
|
Y6 к реле |
|
управления выполняет команды |
||||||
|
ДУУ |
|
|
ДУУ по выбору и подключению |
||||||||
|
|
|
|
|||||||||
|
|
|
|
|
|
очередного |
датчика, |
оценивает |
||||
|
Х3 |
|
|
|
|
его |
состояние, |
подсчитывает |
||||
|
Y1 |
Y2 |
Y3 |
Y4 Y5 |
|
|||||||
|
|
количество |
|
|
опрошенных |
|||||||
|
|
|
|
|
|
|
|
|||||
|
|
ОУ |
gn |
БД |
датчиков |
и |
|
|
количество |
|||
|
|
|
|
сработавших, |
однако |
каждое |
||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
действие |
выполняется |
под |
||||
|
|
|
|
|
|
действием |
|
|
управляющих |
|||
|
|
|
|
|
|
сигналов ДУУ. |
|
|
|
|
||
|
|
|
|
|
|
|
БЦИ |
– |
блок |
цифровой |
||
Рис.1.2 |
БЦИ |
|
|
индикации, |
схему |
которого |
||||||
|
|
|
|
|
|
также необходимо разработать. |
||||||
|
|
|
|
|
|
БЦИ содержит три индикатора: |
||||||
два – для индикации номера проверяемого в данный момент времени датчика в |
||||||||||||
десятичном коде и один – для индикации в двоичном коде его состояние. БД – |
||||||||||||
блок |
контролируемых |
датчиков. |
Вход |
С |
предназначен |
для |
подачи |
|||||

5
тактирующих (синхронизирующих) импульсов, также являющиеся входным воздействием.
Для формализации задачи обозначим буквой i номер очередного контролируемого датчика, буквой j – номер сработавшего датчика. Одним из способов определения, что сработавших датчиков не менее заданного количества, является следующий. Предварительно в ОУ необходимо записать количество сработавших датчиков, при котором должен формироваться сигнал для реле, т.е. в данном случае число 10. При обнаружении каждого сработавшего датчика, из этого числа вычитается единица, поэтому если их десять или более, то в момент обнаружения десятого - число оказывается равным нулю, что и является признаком для необходимости формирования сигнала для реле. Для формального рассмотрения алгоритма работы ДУУ, необходимо ввести операторы Y (управляющие сигналы, выходные сигналы ДУУ) и логические условия Х (управляющие воздействия, входные сигналы ДУУ, в соответствии со значениями которых ДУУ принимает решение о дальнейших своих действиях):
Y1 – приравнять i = 0, установка в исходное состояние; Y2 – установить j = 10;
Y3 – увеличить i на единицу, с целью подключения следующего по порядку датчика;
Y4 – вычесть из j единицу;
Y5 – подключить датчик для контроля;
Y6 |
– сформировать сигнал для срабатывания реле; |
||
X1 - |
1, если датчик сработал; |
||
|
|
0, в противном случае; |
|
X2 |
– |
1, если i |
13; |
|
|
0, если i |
13; |
X3 |
- |
1, если j = 0, т.е. сработало не менее 10 датчиков; |
|
|
|
0, если j |
0. |

а0 
Y1
а1 
Y2
а2 
Y3
а3 
0
Х2
 1
1
Y5
а4 
Х1 0
 1
1
Y4
а5 
0
Х3
 1
1
Y6
а0
Рис.1.3
6
1.3.2. Построение схемы алгоритма работы ДУУ
Команды Y1 – Y6 выполняются в последовательности, которую можно изобразить в виде блок-схемы (рис.1.3), в пяти тактовых периодах. Блоки, изображенные в виде прямоугольников, называются операционными, в них записываются операторы. Блоки, изображенные в виде ромбов, называются блоками
условных переходов по признаку (условию) Хn. Начало и конец цикла проверки датчиков обозначаются окружностью.
1.3.3. Построение графа функционирования
Управляющее устройство является логическим устройством последовательностного типа. Команда, выдаваемая в следующем тактовом периоде, зависит от того, какая команда выдается в текущем тактовом периоде, или, иначе, от состояния, в котором находится устройство. Для определения состояний устройства производится разметка схемы алгоритма, представленной блок-схемой, по следующему правилу: символом а0 отмечается начало и конец блок-схемы, затем последовательно отмечаются символами а1, а2, … выходы всех операторных блоков. На рис.1.3 произведена разметка блок-схемы в соответствии с этим правилом. Другими словами, символом аn условно обозначаются внутренние состояния схемы ДУУ, при этом каждое из них изменяется после формирования каждой команды Yn, причем начальное и конечное состояния автомата приравниваются для возможности начала следующего цикла проверки датчиков. После блоков условного перехода состояние автомата не изменяется и не обозначается отдельным символом, т.к. при этом производится лишь проверка выполнения условия по признаку Хn, при этом сохраняется предыдущее состояние.
Таким образом, в данном автомате получилось шесть состояний и можно приступать к построению графа функционирования.
Состояния в графе функционирования представляются узлами, изображенными кружками на рис.1.4, с записью внутри них соответствующих состояний. Дугами, соединяющими узлы, показывают возможные переходы между узлами. На дугах записывают условия (значения признаков, поступающих на входы ДУУ с выхода ОУ), при которых происходит переход,

7
и какая команда должна выдаваться ДУУ на входы ОУ. При этом, обратите внимание, что, если значение признака Хi равно нулю, то это означает отрицание выполнения условия, поэтому аргумент Хi на графе обозначается с инвертором.
|
|
|
|
|
|
|
-; Y2 |
|
1.3.4. Кодирование состояний |
||||||
|
-; Y1 |
|
а1 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
В |
процессе |
кодирования |
||||
|
|
|
|
|
|
|
|
а2 |
состояний |
каждому |
из |
них |
|||
|
|
|
|
|
|
|
|
должна |
быть |
поставлена |
в |
||||
|
а0 |
|
|
|
|
|
|||||||||
|
|
X1; - |
|
||||||||||||
|
|
|
|
|
|
|
соответствие некоторая кодовая |
||||||||
|
|
|
|
|
|
|
|
-; Y3 |
|||||||
|
|
|
|
|
|
|
|
комбинация. |
Число разрядов |
||||||
X3; Y6 |
X2; - |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
кода выбирается из следующих |
||||||||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
соображений: |
|
если |
число |
|||
|
X3; - |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
а3 |
состояний |
равно |
М, |
то |
для |
||
|
|
|
|
|
|
|
|
обеспечения |
М |
кодовых |
|||||
|
|
|
|
|
|
|
|
|
|||||||
|
а5 |
|
|
|
X2; Y5 |
|
комбинаций |
требуется |
k- |
||||||
|
|
|
|
|
|
|
|
разрядный |
код, |
где |
k |
– |
|||
|
|
|
|
X1; Y4 |
|
|
|
||||||||
|
|
|
|
|
|
|
минимальное целое число, |
при |
|||||||
|
Рис.1.4 |
|
|
а4 |
|
|
|
||||||||
|
|
|
|
|
|
|
котором |
|
|
|
выполняется |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
неравенство М |
2k. |
|
|
|||
В рассматриваемом случае М = 6 и k = 3. Таким образом, состояния устройства отображаются трехразрядными кодовыми комбинациями. Зададим соответствие между состояниями устройства и кодовыми комбинациями с помощью таблицы 1.1.
Таблица 1.1
|
|
Кодовые |
|
||
Состояния |
комбинации |
||||
|
Q3 |
|
Q2 |
|
Q1 |
|
|
|
|
|
|
а0 |
0 |
|
0 |
|
0 |
а1 |
0 |
|
0 |
|
1 |
а2 |
0 |
|
1 |
|
0 |
а3 |
0 |
|
1 |
|
1 |
а4 |
1 |
|
0 |
|
0 |
а5 |
1 |
|
0 |
|
1 |
|
|
|
|
|
|

8
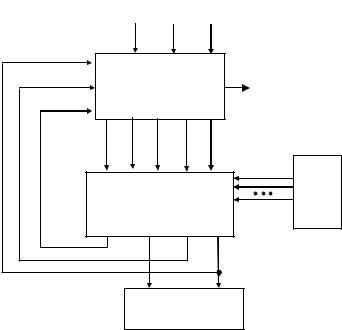
1.3.5. Структурная схема ДУУ
Структурная схема ДУУ приведена на рис. 1.5. RS-триггеры образуют трехразрядный регистр текущего состояния. Комбинационный узел по состоянию регистра (комбинации значений Q3, Q2, Q1) и значениям поступающих с выходов ОУ условий Х1, Х2, Х3 определяет новое состояние, в которое должно перейти ДУУ. При этом формируется такие сигналы S3, R3, S2, R2, S1, R1, которые в момент положительного фронта синхронизирующего импульса на входе С устанавливают в регистре кодовую комбинацию, соответствующему следующему состоянию. Комбинационный узел формирует также команды Y1 – Y6, под действием которых в ОУ выполняются команды.
Дальнейшие операции по синтезу устройства сводятся к синтезу его комбинационного узла.
|
|
|
|
S3 |
Т |
Q3 |
|
|
|
|
|
||
|
|
Комбинационный |
C |
|
|
|
|
g1 |
узел |
|
|
|
|
|
|
|
|
|
||
|
g2 |
|
|
R3 |
Тг3 |
|
От |
Х1 |
|
|
|
||
|
|
|
|
|
||
ОУ |
Х2 |
|
|
|
|
Q2 |
|
Х3 |
|
|
S2 |
Т |
|
|
|
|
|
|||
|
|
|
|
C |
|
|
|
|
Y1…………Y5 |
Y6 |
R2 |
Тг2 |
|
|
|
|
|
|
||
|
|
К ОУ |
К РЕЛЕ |
|
|
|
|
|
|
|
S1 |
Т |
Q1 |
|
C |
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
Рис.1.5 |
|
R1 |
Тг1 |
|
|
1.3.6. Построение таблицы функционирования ДУУ |
|||||
Таблица функционирования содержит графы, в которые заносятся данные текущего состояния, значения входных условий, данные следующего состояния, в которое должно перейти устройство, и выходные сигналы комбинационного узла.
Функционирование комбинационного узла рассматриваемого устройства представлено в табл. 1.3.
При заполнении таблицы используется граф функционирования, приведенный на рис.1.4 и таблица переходов RS-триггера (табл.1.2). Заполнение этой таблицы производится из следующих соображений. Для перехода прямого выхода RS-триггера 0 0 на входе S должен быть обязательно обеспечен уровень лог.0, т.к. назначение этого входа – установка 1, в противном случае, при подаче на него активного уровня – лог.1 (триггер с
9
прямыми входами) перехода 0 0 не произойдет. На входе же R может быть любой уровень, т.к. при уровне лог.0 организуется режим хранения (S = 0, R = 0) и поскольку предыдущее состояние – лог.0, то именно это состояние и сохранится. Если на этом входе установить активный уровень лог.1, то триггеру задается режим установки 0 (S = 0, R = 1), поэтому на его прямом выходе будет лог.0. таким образом, в любом случае обеспечивается переход
0 0. Аналогичные рассуждения можно произвести и для перехода 1 |
1. |
|||||||||
|
|
|
|
Переключения 0 |
1 и 1 |
0 обеспечиваются |
||||
|
Таблица 1.2 |
подачей соответствующих |
таблице |
состояний |
||||||
|
RS-триггера логических уровней для режимов уст.1 |
|||||||||
Переход |
S |
R |
||||||||
и уст.0. |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
0 |
0 |
0 |
X |
По значению текущего состояния Q1, Q2, Q3, |
||||||
0 |
1 |
1 |
0 |
принимаемому из регистра текущего состояния, и |
||||||
поступающим из |
объекта управления |
значениям |
||||||||
|
|
|
|
|||||||
1 |
0 |
0 |
1 |
условий Х1, Х2, Х3 |
в таблице определяется |
|||||
1 |
1 |
X |
0 |
следующее состояние, сигналы для входов R и S |
||||||
триггеров, необходимые для установки регистра в |
||||||||||
|
|
|
|
|||||||
|
|
|
|
следующее состояние, и логические значения |
||||||
|
|
|
|
команд Y1 – Y6. |
|
|
|
|
|
|
|
Заполнение |
таблицы происходит |
следующим |
образом. |
В |
графе |
||||
следующего состояния задается состояние а0; по графу (рис.1.4) находится дуга, ведущая в узел, соответствующий состоянию а0; найденных дуг оказывается три – одна из узла а3, и две из узла а5. Рассмотрим сначала первую дугу, выходящую из узла а3. Поскольку а0 занесено в графу следующее состояние, то текущим – оказывается а3, его заносят в соответствующую графу, в ту же строку. На дуге указано условие перехода Х2. Заносим в таблицу
кодовые комбинации а3 и а0, при этом выясняется, что переход а3 |
а0 связан |
||||||||||||||||
с переходами Q3 : 0 |
0, |
Q2 : 1 |
|
0 и Q1 : 1 0. Из таблицы переходов RS- |
|||||||||||||
триггера определяем, что сигнал должен присутствовать на входах R2 = 1, |
|||||||||||||||||
R1 = 1. Сигнал команды не формируется. |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1.3 |
||
Текущее состояние |
|
Следующее состояние |
Условие |
Выходные сигналы |
|||||||||||||
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
перехода |
|
|
|
||
Внутр |
|
Код |
|
Внутр |
|
|
|
Код |
|
|
Установки триггеров |
|
Коман- |
||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
сост. |
Q3 |
Q2 |
|
Q1 |
сост. |
|
Q3 |
|
Q2 |
|
Q1 |
|
|
|
регистров |
|
да |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
а3 |
0 |
1 |
|
1 |
а0 |
|
0 |
|
0 |
|
0 |
|
|
|
R1, R2 |
|
- |
|
|
Х 2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
а5 |
1 |
0 |
|
1 |
а0 |
|
0 |
|
0 |
|
0 |
|
|
|
R1, R3 |
|
- |
|
|
|
Х 3 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
а5 |
1 |
0 |
|
1 |
а0 |
|
0 |
|
0 |
|
0 |
|
Х3 |
R1, R3 |
|
Y6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а0 |
0 |
0 |
|
0 |
а1 |
|
0 |
|
0 |
|
1 |
- |
|
S1 |
|
Y1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а1 |
0 |
0 |
|
1 |
а2 |
|
0 |
|
1 |
|
0 |
- |
|
R1, S2 |
|
Y2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а2 |
0 |
1 |
|
0 |
а3 |
|
0 |
|
1 |
|
1 |
- |
|
S1 |
|
Y3 |
|
а3 |
0 |
1 |
|
1 |
а4 |
|
1 |
|
0 |
|
0 |
|
Х2 |
R1, R2, S3 |
|
Y5 |
|
а4 |
1 |
0 |
|
0 |
а2 |
|
0 |
|
1 |
|
0 |
|
|
|
S2, R3 |
|
- |
|
|
|
|
|
Х 1 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
а4 |
1 |
0 |
|
0 |
а5 |
|
1 |
|
0 |
|
1 |
|
Х1 |
S1 |
|
Y4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

10
Далее в следующие две строки таблицы, в графу следующего состояния заносится снова состояние а0 и используя ту же методику заполняются графы таблицы для двух других дуг, выходящих из узла а5. Так далее заполняется вся таблица, при этом каждой дуге графа соответствует отдельная строка таблицы. Порядок строк значения не имеет.
1.3.7. Построение системы выходных логических уравнений
Для каждой строки таблицы функционирования комбинационного узла составляют логическое уравнение в следующей форме: в левой части перечисляют переменные, приведенные в графе выходных величин Y1 – Y6, в правой части – логическое выражение, представленное через текущее состояние а0 – а5 и значение условия перехода. Для рассматриваемого устройства из табл. 2.3 получаем следующие логические выражения:
|
|
|
|
|
R1 , R2 |
a3 |
|
X 2 ; |
|
|
|
|
|
|
R1 , R3 |
a5 |
|
X 3 ; |
|
R1 , R3 ,Y6 |
a5 X 3 ; |
|||
S1 ,Y1 |
a0 ; |
|
|
|
R1 , S2 ,Y2 |
a1 ; |
|||
S1 ,Y3 |
a2 ; |
|
|
|
R1 , R2 , S3 ,Y5 a3  X 2 ;
X 2 ;
S2 , R3 |
a4 X1 ; |
S1 ,Y4 |
a4 X1. |
Затем определяют логическое выражение для каждой выходной величины. Для этого записывают равенство, в левой части которого указывают выходную величину, а в правой части – связанные через операцию дизъюнкции правые части тех из ранее составленных выражений, в которых представлена данная выходная величина. Полученные логические выражения приводят к минимальной их форме.
R1 a3  X 2 a5
X 2 a5  X 3 a5
X 3 a5  X 3 a1 a3
X 3 a1 a3  X 2 a3 a5 a1 ;
X 2 a3 a5 a1 ;
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
a3 X 2 |
a3 X 2 |
a3 ; |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R3 |
a5 X 3 |
a5 X 3 |
a4 X1 a5 a4 X1 ; |
|||||||||
S1 |
a0 |
|
a2 |
a4 X1; |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
S2 |
a1 |
a4 X1; |
|
|
|
|
|
|||||
S3 |
a3 Х2 ; |
|
|
|
|
|
|
|
|
|||
Y1 |
a0 ; |
|
|
|
|
|
|
|
|
|
|
|
Y2 |
a1 ; |
|
|
|
|
|
|
|
|
|
|
|
Y3 |
a2 ; |
|
|
|
|
|
|
|
|
|
|
|
Y4 |
a4 X1 ; |
|
|
|
|
|
|
|
|
|||
Y5 |
a3 |
X 2 ; |
|
|
|
|
|
|
|
|
||
Y6 |
a5 |
X 3 ; |
|
|
|
|
|
|
|
|
||