

II лаб работы
.pdfЛабораторная работа 1 Методика синтеза систем подчиненного регулирования
1.1Структура и общая характеристика СПР
Система |
подчиненного |
регулирования |
строится |
в |
соответствием с |
||||||||
обобщенной структурной схемой на рисунке1. Весь объект управления |
|||||||||||||
представляется в виде n последовательно соединенных типовых динамических |
|||||||||||||
звеньев с заданными передаточными функциямиW01 ( p),W02 ( p), ...,W0n ( p) . |
|
||||||||||||
Разбиение на звенья с выходными координатамиx1 , x2 ,..., xn |
производится |
||||||||||||
таким |
образом, чтобы |
каждое |
из |
них |
содержало |
|
минимальное |
число |
|||||
существенных постоянных времени, обычно называемых «большими», влияние |
|
||||||||||||
которых |
должно |
быть |
скомпенсировано |
системой |
с |
целью достижения |
|||||||
предельного |
быстродействия. |
Как |
правило, |
звенья |
содержат |
одну |
или |
||||||
максимум две больших постоянных времени. Для управления каждой из |
|||||||||||||
координат x1 , x2 ,..., xn |
применяются |
отдельные |
регуляторы, имеющие, |
|
|||||||||
соответственно, |
передаточные |
функции |
W p1 ( p),W p2 ( p), ...,Wpn ( p) |
и |
|||||||||
образующие с объектом замкнутые контуры с помощью сигналов обратных
связей с коэффициентами передачиko.c1 ,ko.c 2 ,...,ko.cn . В итоге организуется
каскадное |
включение |
регуляторов, при |
котором |
они |
соединяются |
||
последовательно таким образом, что выход |
одного |
регулятора |
является |
||||
задающим |
воздействием |
для |
другого. На |
входе |
каждого |
регулятора |
|
сравниваются |
сигналы задания uз1 , uз2 ,..., uз(n-1) , uзn |
и обратной |
отрицательной |
||||
связи по регулируемой координатеuо.с1 , uо.с 2 ,..., uо.с (n-1) , uо.сn . |
В результате |
||||||
система состоит из«n» контуров |
регулирования, |
по числу звеньев |
объекта, |
||||
«вложенных» друг в друга. Внутренний контур включает регулятор и звено с |
|||||||
передаточными функциями W p1 ( p) |
и W01 ( p) , а каждый последующий контур |
||||||
содержит кроме регулятора и соответствующего звена объекта предыдущий замкнутый контур. Задание каждому контуру поступает от внешнего по отношению к нему регулятора, который в этом смысле«подчиняет» себе
2

внутренний контур. В итоге вся система оказывается«подчиненной» задаче
управления выходной координатой объекта xn .
Рисунок 1 – Обобщенной структурной схемой системы подчиненного регулирования
В реальных ситуациях структура СПР может усложняться по сравнению со
схемой на рисунке1 за счет внутренних и перекрестных связей между отдельными звеньями объекта, ввиду необходимости учета нелинейностей различных элементов, за счет появления инерционностей в каналах обратных
связей, что |
требует |
замены |
коэффициентов |
их |
передачиk |
на |
|
|
|
|
|
о.с |
|
соответствующие передаточные функции Wо.с ( p) , и других факторов. |
|
|||||
Выбор |
регуляторов |
в СПР |
производится, как |
правило, |
исходя |
из |
требований достижения минимального времени отработки управляющих воздействий при заданном качестве переходного процесса во всех контурах регулирования.
1.2Методика выбора и реализация регуляторов в СПР
В достаточно общем случае передаточная функцияG(p) объекта каждого из оптимизируемых контуров может быть представлена в виде произведения
G( p) = Gk ( p)GH ( p), |
(1) |
где Gk(p) и GH(p) – передаточные функции различных частей объекта, влияния |
|
которых на динамические свойства системы соответственно компенсируются и |
|
не компенсируются регулятором. Как правило, |
в первом приближении |
некомпенсируемая часть состоит из ряда |
последовательно соединенных |
3

апериодических звеньев первого порядка, а структура Gk(p) может отличаться
от GH(p) наличием интегрирующих звеньев:
GК ( p) = L k1
П (Tm p + vm )
m=1
; GH ( p) = M |
k2 |
(2) |
|
П(Tmj p + 1)
j=1
Здесь vm=1 или vm=0 |
соответственно |
для |
апериодических |
и |
|||||||||||
интегрирующих звеньев в составеGk(p); Tm, m=1,2,…,L³1 – компенсируемые |
|
||||||||||||||
постоянные |
времени |
объекта, |
обычно |
именуемые «большими», |
а |
Тmj,j = |
|
||||||||
1,2,...,M³1 – |
так называемые «малые» постоянные |
времени, сумма |
которых |
|
|||||||||||
может считаться незначительной в сравнении с предъявляемыми требованиями |
|
||||||||||||||
к быстродействию и компенсация влияния |
|
которых |
вследствие |
этого |
|||||||||||
нецелесообразна. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Требуемая передаточная функция регулятораWp(p) определяется по |
|
||||||||||||||
желаемой передаточной функции Ф) (рразомкнутого |
|
контура, |
заданным |
|
|||||||||||
передаточным |
функциям G(p) |
и Wо.с.(p) объекта |
и |
обратной |
связи |
по |
|||||||||
регулируемой величине в соответствии с известным соотношением. |
|
|
|
||||||||||||
|
|
|
|
WP ( p) = |
|
F( p) |
, |
|
|
|
|
(3) |
|
||
|
|
|
|
G( p)WO.C ( p) |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где, согласно структурной схеме рис. 1, будем считать, что WO.C ( p) совпадает с |
|
||||||||||||||
коэффициентом передачи kO.C |
датчика |
обратной |
связи. |
Отсюда, |
используя |
|
|||||||||
формулы (1), (2) и (3), и предполагая, что динамикой некомпенсируемой части |
|
||||||||||||||
пренебрегаем, получим Wp(p) в следующем виде: |
|
|
|
|
|
|
|||||||||
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Õ(Tm p +n m ) |
|
|
|
|
|
|
M |
|
|
|
|
|
Wp ( p) = |
m=1 |
|
; Tи |
= ko.c kобTo = 2ko.c kоб åTmj , |
|
(4) |
|
||||||||
|
Tи p |
|
|
||||||||||||
здесь kОБ = k1k2 |
|
|
|
|
|
|
|
|
j=1 |
|
|
|
|
||
– коэффициент передачи объекта. |
|
|
|
|
|
|
|||||||||
Как следует из (4), постоянные времени форсирующих звеньев регулятора |
|
||||||||||||||
равны большим постоянным времени объекта, |
постоянная |
времени |
|
||||||||||||
интегрирующего звена определяется произведением удвоенной суммы малых |
|
||||||||||||||
постоянных времени объекта и коэффициента передачи неизменяемой части |
|||||||||||||||
системы. На |
практике |
применяются |
следующие пять типов регуляторов вида |
|
|||||||||||
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|

(4), соответствующих наиболее характерным вариантам свойств управляемых объектов.
Пропорциональный регулятор (П-регулятор), для которого
|
|
|
W p ( p) = k p . |
(5) |
|||
Как |
следует |
из(4), |
такой |
регулятор требуется в |
том случае, если |
||
Gê ( p) представляет |
собой |
одно |
интегрирующее звено, т.е. |
L = 1, n1 = 0 , и |
|||
k p = T1 Tи . |
|
|
|
|
|
|
|
2. |
Интегральный регулятор (И-регулятор) |
|
|||||
|
|
|
W p ( p) = |
1 |
, |
(6) |
|
|
|
|
|
||||
|
|
|
|
|
Tp p |
|
|
который необходимо применять, в соответствии с (4), если в структуре объекта
вообще не |
содержатся звенья |
с |
большими |
постоянными времени, т. . |
все |
||||||
Tm = 0 и n m =1 в (4). Тогда, очевидно, в (6) надо выбрать Tр = Tи . |
|
||||||||||
3. |
Пропорционально-интегральный регулятор (ПИ-регулятор) |
|
|||||||||
|
W p ( p) = |
t1 p + 1 |
= |
1 |
|
+ k p1 ; k p1 |
= |
t1 |
, |
(7) |
|
|
|
|
|
|
|
||||||
|
|
T p p |
T p p |
T p |
|
||||||
необходимый в том случае, если компенсируемая часть объекта представляет собой одно апериодическое звено ( L =1, n1 = 1 в (4)). Сравнивая выражения (7)
и (4), видим, что следует принять t1 = T1 ; Tp = Tи .
Остальные два типа регуляторов используются реже и соответствуют
большему числу больших постоянных времени объекта.
4. Пропорционально-дифференциальный регулятор (ПД-регулятор)
W p |
( p) = |
t1 p(t 2 p + 1) |
= |
t1t 2 |
p + |
t1 |
= |
t1 |
(t 2 p + 1) . |
(8) |
Tp p |
Tp |
Tp |
|
|||||||
|
|
|
|
|
Tp |
|
||||
Необходимость в применении ПД-регулятора возникает в том случае, если
объект содержит две большие постоянные времени в составе последовательно
включенных |
интегрирующего |
и |
апериодическогозвеньев: |
L = 2 , n1 = 0 , n 2 =1 |
в (4). Из (4) и (8) следует, что t1 = T1 ; t2 |
= T2 ; Tp = Tи . |
|
5.Пропорционально-интегрально-дифференциальный регулятор
(ПИД-регулятор)
5

W p ( p) = |
(t1 p +1)(t 2 p +1) |
= |
t1t 2 |
p + |
t1 +t 2 |
+ |
1 |
. |
(9) |
|
|
Tp |
Tp |
|
|||||||
|
T p p |
|
|
|
|
Tp p |
|
|||
ПИД-регулятор |
требуется, как это |
следует |
из прямого |
сравнения |
||||||
выражений (4) с (9), если компенсируемая часть объекта представляет собой |
||||||||||
два последовательно |
соединенных |
апериодических |
звена( L = 2 , n1 =n 2 |
= 1 ), |
||||||
причем следует положить t1 = T1 ; t2 |
= T2 ; Tp |
= Tи . |
|
|
|
|
||||
1.3Задание
Для структурной схемы (рис. 2) САУ на основе структуры передаточной функции объекта Wo ( p) выбрать структуру и рассчитать параметры регулятора
Wр ( p) , настроенного на технический оптимум.
Рисунок 2 - Структурная схема САУ
Построить Simulink-модель синтезированной САУ и получить переходные характеристики. Проанализировать влияние коэффициентов регуляторов на перерегулирование и время окончания переходного процесса(изменять параметры регулятора с шагом в 10% от расчетной величины, взять 4-6 точек).
Проанализировать работу САУ с П-, ПИ-, ПИД-регуоляторами.
1.4Варианты
Передаточная функция объекта Wo ( p) имеет следующий вид:
|
|
W ( p) = |
k1 |
× |
|
k2 |
. |
|
(10) |
||
|
|
|
|
|
|
||||||
|
|
o |
T1 p +1 T2 p + a |
|
|
|
|||||
Группа 1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
№ |
K1 |
|
T1 |
|
K 2 |
T2 |
a |
|
||
|
1 |
83 |
|
120 |
|
|
42 |
25 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
97 |
|
119 |
|
|
40 |
39 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6
№ |
K1 |
T1 |
K 2 |
T2 |
a |
3 |
108 |
119 |
37 |
53 |
1 |
|
|
|
|
|
|
4 |
116 |
118 |
33 |
67 |
1 |
|
|
|
|
|
|
5 |
118 |
116 |
28 |
80 |
1 |
|
|
|
|
|
|
6 |
116 |
115 |
23 |
92 |
1 |
|
|
|
|
|
|
7 |
108 |
113 |
19 |
104 |
1 |
|
|
|
|
|
|
8 |
97 |
110 |
16 |
114 |
1 |
|
|
|
|
|
|
9 |
83 |
108 |
14 |
123 |
1 |
|
|
|
|
|
|
10 |
68 |
105 |
13 |
131 |
1 |
|
|
|
|
|
|
11 |
53 |
102 |
14 |
138 |
1 |
|
|
|
|
|
|
12 |
39 |
99 |
16 |
143 |
1 |
|
|
|
|
|
|
13 |
28 |
95 |
19 |
147 |
1 |
|
|
|
|
|
|
14 |
20 |
92 |
23 |
149 |
1 |
|
|
|
|
|
|
15 |
18 |
88 |
28 |
150 |
1 |
|
|
|
|
|
|
16 |
20 |
84 |
33 |
149 |
1 |
|
|
|
|
|
|
17 |
28 |
79 |
37 |
147 |
1 |
|
|
|
|
|
|
18 |
39 |
75 |
40 |
143 |
1 |
|
|
|
|
|
|
19 |
53 |
70 |
42 |
138 |
0 |
|
|
|
|
|
|
20 |
68 |
65 |
43 |
131 |
0 |
|
|
|
|
|
|
21 |
83 |
60 |
42 |
123 |
0 |
|
|
|
|
|
|
22 |
97 |
55 |
40 |
114 |
0 |
|
|
|
|
|
|
23 |
108 |
49 |
37 |
104 |
0 |
|
|
|
|
|
|
24 |
116 |
44 |
33 |
92 |
0 |
|
|
|
|
|
|
25 |
118 |
38 |
28 |
80 |
0 |
|
|
|
|
|
|
26 |
116 |
33 |
23 |
67 |
0 |
|
|
|
|
|
|
27 |
108 |
27 |
19 |
53 |
0 |
|
|
|
|
|
|
28 |
97 |
21 |
16 |
39 |
0 |
|
|
|
|
|
|
29 |
83 |
16 |
14 |
25 |
0 |
|
|
|
|
|
|
30 |
68 |
10 |
13 |
10 |
0 |
|
|
|
|
|
|
Группа 8+8а
7

№ |
K1 |
T1 |
K 2 |
T2 |
a |
1 |
59 |
65 |
30 |
17 |
0 |
|
|||||
2 |
69 |
65 |
28 |
25 |
1 |
|
|||||
3 |
77 |
64 |
26 |
32 |
1 |
|
|||||
4 |
82 |
64 |
23 |
38 |
1 |
|
|||||
5 |
83 |
63 |
20 |
45 |
1 |
|
|||||
6 |
82 |
62 |
17 |
51 |
1 |
|
|||||
7 |
77 |
61 |
14 |
57 |
1 |
|
|||||
8 |
69 |
60 |
11 |
62 |
1 |
|
|||||
9 |
59 |
59 |
10 |
67 |
1 |
|
|||||
10 |
48 |
58 |
9 |
71 |
1 |
|
|||||
11 |
37 |
56 |
10 |
74 |
1 |
|
|||||
12 |
27 |
54 |
11 |
77 |
1 |
|
|||||
13 |
19 |
53 |
14 |
78 |
1 |
|
|||||
14 |
14 |
51 |
17 |
80 |
1 |
|
|||||
15 |
13 |
49 |
20 |
80 |
1 |
|
|||||
16 |
14 |
47 |
23 |
80 |
1 |
|
|||||
17 |
19 |
45 |
26 |
78 |
1 |
|
|||||
18 |
27 |
42 |
28 |
77 |
1 |
|
|||||
19 |
37 |
40 |
30 |
74 |
0 |
|
|||||
20 |
48 |
38 |
30 |
71 |
0 |
|
|||||
21 |
59 |
35 |
30 |
67 |
0 |
|
|||||
22 |
69 |
32 |
28 |
62 |
0 |
|
|||||
23 |
77 |
30 |
26 |
57 |
0 |
|
|||||
24 |
82 |
27 |
23 |
51 |
0 |
|
|||||
25 |
83 |
24 |
20 |
45 |
0 |
|
|||||
26 |
82 |
21 |
17 |
38 |
0 |
|
8
|
№ |
K1 |
T1 |
K 2 |
T2 |
a |
|
27 |
77 |
19 |
14 |
32 |
0 |
|
|
|||||
|
28 |
69 |
16 |
11 |
25 |
0 |
|
|
|||||
|
29 |
59 |
13 |
10 |
17 |
0 |
|
|
|||||
|
30 |
48 |
10 |
9 |
10 |
0 |
|
|
|||||
Группа 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ |
K1 |
T1 |
K 2 |
T2 |
a |
|
|
|
|
|
|
|
|
1 |
48 |
47 |
24 |
15 |
0 |
|
|
|
|
|
|
|
|
2 |
56 |
46 |
23 |
20 |
1 |
|
|
|
|
|
|
|
|
3 |
63 |
46 |
21 |
24 |
1 |
|
|
|
|
|
|
|
|
4 |
67 |
46 |
19 |
29 |
1 |
|
|
|
|
|
|
|
|
5 |
68 |
45 |
16 |
33 |
1 |
|
|
|
|
|
|
|
|
6 |
67 |
45 |
13 |
37 |
1 |
|
|
|
|
|
|
|
|
7 |
63 |
44 |
11 |
41 |
1 |
|
|
|
|
|
|
|
|
8 |
56 |
43 |
9 |
45 |
1 |
|
|
|
|
|
|
|
|
9 |
48 |
43 |
8 |
48 |
1 |
|
|
|
|
|
|
|
|
10 |
39 |
42 |
8 |
50 |
1 |
|
|
|
|
|
|
|
|
11 |
30 |
41 |
8 |
53 |
1 |
|
|
|
|
|
|
|
|
12 |
22 |
40 |
9 |
54 |
1 |
|
|
|
|
|
|
|
|
13 |
16 |
38 |
11 |
56 |
1 |
|
|
|
|
|
|
|
|
14 |
12 |
37 |
13 |
56 |
1 |
|
|
|
|
|
|
|
|
15 |
10 |
36 |
16 |
57 |
1 |
|
|
|
|
|
|
|
|
16 |
12 |
35 |
19 |
56 |
1 |
|
|
|
|
|
|
|
|
17 |
16 |
33 |
21 |
56 |
1 |
|
|
|
|
|
|
|
|
18 |
22 |
32 |
23 |
54 |
1 |
|
|
|
|
|
|
|
|
19 |
30 |
30 |
24 |
53 |
0 |
|
|
|
|
|
|
|
|
20 |
39 |
28 |
25 |
50 |
0 |
|
|
|
|
|
|
|
|
21 |
48 |
27 |
24 |
48 |
0 |
|
|
|
|
|
|
|
|
22 |
56 |
25 |
23 |
45 |
0 |
|
|
|
|
|
|
|
9
№ |
K1 |
T1 |
K 2 |
T2 |
a |
23 |
63 |
23 |
21 |
41 |
0 |
|
|
|
|
|
|
24 |
67 |
21 |
19 |
37 |
0 |
|
|
|
|
|
|
25 |
68 |
19 |
16 |
33 |
0 |
|
|
|
|
|
|
26 |
67 |
18 |
13 |
29 |
0 |
|
|
|
|
|
|
27 |
63 |
16 |
11 |
24 |
0 |
|
|
|
|
|
|
28 |
56 |
14 |
9 |
20 |
0 |
|
|
|
|
|
|
29 |
48 |
12 |
8 |
15 |
0 |
|
|
|
|
|
|
30 |
39 |
10 |
8 |
10 |
0 |
|
|
|
|
|
|
10
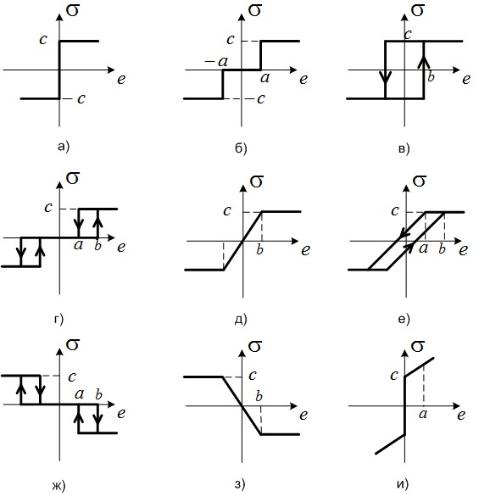
Лабораторная работа 2 Исследование типовых нелинейных элементов
На рисунке 1 представлены графики типовых нелинейных элементов.
а) идеальное реле; б) идеальное реле с зоной нечувствительности;
в) реле с гистерезисом; г), ж) идеальное реле с гистерезисом и зоной нечувствительностью;
д), з) коэффициент усиления с ограничением; е) люфт;
и) сухое и вязкое трение Рисунок 1 - Графики типовых нелинейностей
Необходимо создать Simulink-модель, в которой будут реализованы все типы нелинейностей, а так же построена статическая характеристика каждой нелинейности.
Для построения статической характеристики необходимо реализовать в
Simulink структурную схему, представленную на рисунке 2.
2