

Термех / Динамика_относительного_движения
.pdfМинистерство образования Российской Федерации. Государственное образовательное учреждение высшего профессионального образования
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра «МЕХАНИКА»
ДИНАМИКА ОТНОСИТЕЛЬНОГО ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
Данное пособие входит в серию электронных учебных пособий по теоретической механике, разрабатываемых на кафедре механики СамГТУ.
Пособие предназначено для самостоятельного изучения студентами темы «Динамика относительного движения материальной точки».
Зав. кафедрой – д.т.н., проф. Я.М.Клебанов, Разработчики – Л.Б.Черняховская, Л.А.Шабанов.
Самара – 2008.

Переносное, относительное и абсолютное движение.
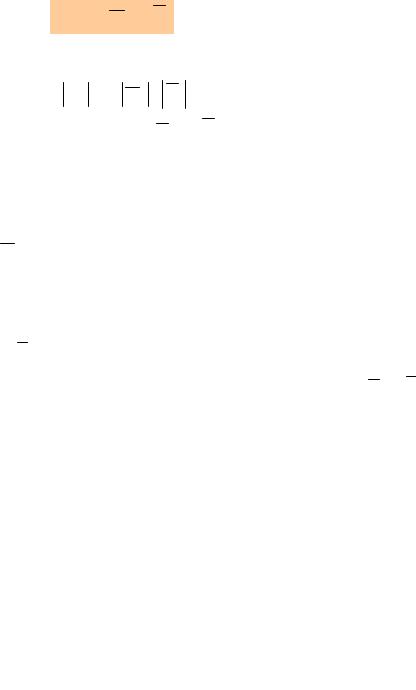
Рассмотрим движение точки М относительно двух систем отсчета, одна
из которых O1x1y1z1 движется относительно другой, неподвижной, |
системы |
||||||||
отсчета Oxyz (рис.1). |
|
|
z1 |
|
|
|
|||
Относительным |
называется |
z |
M(z,y,z) |
||||||
|
|||||||||
движение |
точки |
М относительно |
|
||||||
подвижной системы отсчета O1x1y1z1. |
|
ρ |
|
|
|||||
Переносным |
|
называется |
|
r |
|
||||
|
|
|
|
||||||
движение, |
совершаемое |
подвижной |
|
k |
j |
y |
|||
системой |
отсчета |
Oxyz |
и |
всеми |
|
r0 i |
О |
|
|
неизменно |
связанными |
с |
нею |
О1 |
y1 |
|
|||
точками пространства относительно |
|
x |
|
|
|||||
неподвижной системы отсчета. |
|
|
|
|
|
||||
Абсолютным называется |
|
|
|
|
|
||||
движение точки по отношению x1 |
|
Рис. 1. |
|
|
|||||
к неподвижной системе отсчета O1x1y1z1 .
Всем кинематическим характеристикам, относящимся к относительному движению, присваивается индекс r, кинематическим характеристикам переносного движения–индекс е.
Относительной скоростью Vr называется скорость точки по отношению к подвижной системе отсчета.
Переносной скоростью Vе называется скорость той точки, неизменно
связанной с подвижной системой отсчета, с которой в данный момент совпадает точка М, относительно неподвижной системы отсчета.
Абсолютная скорость V - это скорость точки относительно неподвижной системы отсчета. Аналогично определяются относительное
ускорение ar , переносное ускорение ae и абсолютное ускорение a .
Теорема о сложении скоростей. При сложном движении абсолютная скорость точки равна геометрической сумме переносной и относительной скоростей.
V =Ve +Vr
Теорема о сложении ускорений. При сложном движении ускорение точки равно геометрической сумме переносного, относительного ускорений и ускорения Кориолиса.
a = ae + ar + ac
Полученное равенство выражает теорему Кориолиса:
Ускорение Кориолиса равно удвоенному векторному произведению переносной угловой скорости и относительной скорости точки.
ac = 2ωе ×Vr
Модуль ускорения Кориолиса равен
аС = 2ωe Vr sinα ,
где α - угол между векторами ωе и Vr .
Направление ac определяется в соответствии с общим правилом
векторного произведения.
Ускорение Кориолиса равно нулю в следующих случаях:
1) когда ωе = 0, т.е. когда переносное движение является
поступательным,
2)когда Vr = 0, т.е. в случае относительного покоя,
3)когда угол α = 0, т.е. в тех случаях, когда вектора ωе и Vr
параллельны.
Основной закон относительного движения материальной точки.
Рассмотрим движение материальной точки относительно неинерциальной системы координат, т.е. относительно системы координат, движущейся произвольным образом относительно неподвижной.
В случае сложного движения точки абсолютное ускорение определяется по теореме Кориолиса:
a = ae + ar + aс, |
(1) |
где ae - переносное ускорение, ar - |
относительное ускорение, aс - |
ускорение Кориолиса. |
|
Умножим равенство (1) на массу движущейся материальной точки:
ma = mae + mar + mak .
Выделим в подученном равенстве слагаемое, характеризующее относительное движение материальной точки
mar = ma −mae −maс
|
|
|
|
|
|
|
|
|
|
|
ma = |
|
, где |
|
- |
|
В соответствии со вторым законом Ньютона заменим |
F |
|||||||||||||||
F |
||||||||||||||||
равнодействующая всех сил, приложенных к материальной точке. |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Введем обозначения: |
Фe = −mae , |
Фс = −maс . |
|
|
|
|
|
|||||||||
Тогда |
|
|
|
|
|
|||||||||||
mar = |
|
+ |
|
|
|
|
|
|
|
|
|
|||||
F |
Фe +Фс |
(2) |
|
|
|
|
||||||||||
Вектор Фe = −mae называется переносной силой инерции, вектор Фс = −maс - силой инерции Кориолиса.
Равенство (2) представляет собой основной закон относительного движения материальной точки:
Относительно неинерциальной (подвижной) системы отсчета материальная точка движется так, как будто к ней, кроме действующей силы, приложены переносная сила инерции и сила инерции Кориолиса.
Векторы Фe и Фс можно рассматривать как поправки ко второму закону
Ньютона для материальной точки, движение которой рассматривается относительно неинерциальной системы отсчета.
Частные случаи.
1. Пусть подвижная система отсчета по отношению к инерциальной системе движется поступательно. В этом случае угловая скорость
переносного движенияωе = 0 , следовательно, будут равняться нулю ускорение Кориолиса и сила инерции Кориолиса: aс = 2ωe ×Vr =0 ,
Фс = −maс = 0.
Закон относительного движения материальной точки (2) принимает вид: mar = F +Фe
2. Пусть подвижная система отсчета движется поступательно прямолинейно и равномерно. При таком двиижении ae = 0 , следовательно,
Фe = −mae = 0 . Кроме того, ωе = 0 , aс = 0 , Фс = −maс = 0. Тогда равенство (2) принимает вид:
mar = F
Следовательно, основной закон относительного движения точки в этом случае совпадает с основным законом движения точки по отношению к
инерциальной системе отсчета. Отсюда вытекает принцип относительности, открытый Галилеем:
Никаким механическим экспериментом нельзя обнаружить, находится ли данная система отсчета в покое или совершает поступательное, равномерное, прямолинейное движение по отношению к инерциальной (неподвижной) системе отсчета.
Таким образом, все системы отсчета, движущиеся поступательно, равномерно и прямолинейно относительно инерциальной системы, являются инерциальными.
3. Условие относительного равновесия. В этом случае |
|
|
|
||||||||||
Vr = 0 и |
|||||||||||||
ar = 0 , следовательно, aс = 2 |
|
|
|
|
|
|
|
||||||
ωe ×Vr |
= 0, |
Фс = −m aс |
= 0 . |
||||||||||
Тогда уравнение (2) принимает вид: |
|
|
|
|
|
|
|||||||
|
|
+ |
|
|
|
|
|
|
|||||
F |
Фe = 0 |
(4) |
|
|
|
||||||||
Это уравнение называется уравнением относительного равновесия материальной точки.
Влияние вращения Земли на равновесие тел.
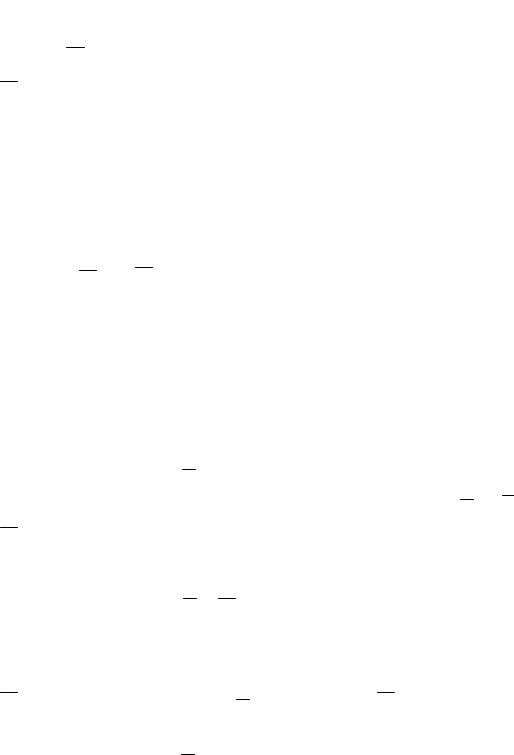
Рассмотрим силы, действующие на материальную точку М, подвешенную на нити (рис.2) и находящуюся в покое относительно Земли.
На точку М действует сила притяжения F, направленная к центру Земли, сила натяжения нити Т и сила переносная инерции Фe = −mae , направленная в сторону, противоположную нормальному ускорению точки
aen , которое в свою очередь направлено по
радиусу вращения ОМ = r к оси вращения Земли.
aen =ω2OM =ω2 r.
При равновесии точки на поверхности Земли геометрическая сумма приложенных к точке сил и переносной силы инерции равна нулю:
F +T +Фe = 0.
Т 
ОМ Фе
Фе
ωF
Сψ ϕmg
(5)Направление вектора Т определяет
Рис.2.
направление вертикали в данном пункте поверхности Земли, а плоскость, |
||||
перпендикулярная силе Т , является горизонтальной плоскостью. Из |
||||
равенства (2.5) следует, что |
|
|
|
|
Т = −(F +Фе) |
|
|
|
|
Сила mg , равная по модулю и направленная противоположно силе Т , |
||||
называется силой тяжести. |
|
|
|
|
mg = −T = F +Фе . |
|
|
|
|
Сила тяжести равна геометрической сумме силы земного притяжения |
||||
и силы инерции, обусловленной суточным вращением Земли. |
|
|||
Таким образом, вращение Земли учитывается при определении силы |
||||
тяжести, включением в нее переносной силы инерции. |
|
|
||
Модуль силы инерции |
|
|
|
|
Фе = maen = mω2 r . |
|
|
|
|
Величина этой силы в виду малости значения ω2 |
очень мала. Наибольшее |
|||
значение сила Фе имеет на экваторе и составляет там 0,034% от |
|
|||
величины силы притяжения. |
|
|
|
|
Влияние вращения Земли на движение тел у ее |
поверхности |
|||
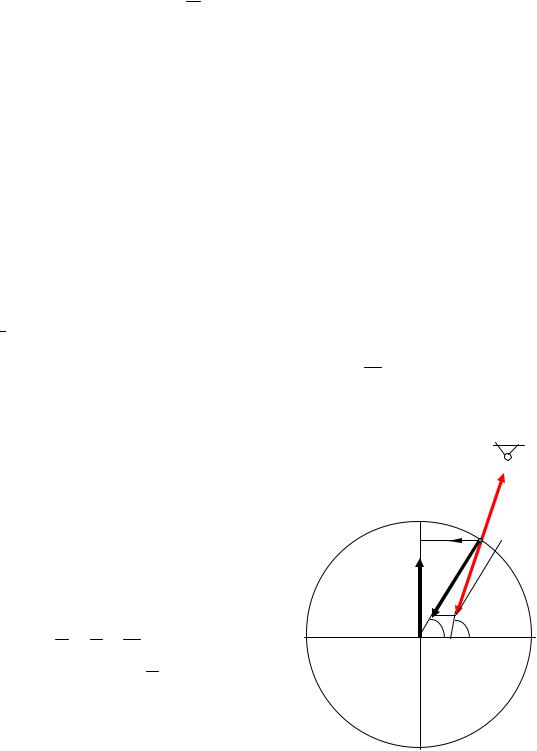
Рассмотрим движение материальной точки по меридиану с юга на север |
||||
(рис.3) и, так как переносная сила инерции включается в силу тяжести, то |
||||
проанализируем влияние на это движение |
|
ω |
|
|
силы инерции Кориолиса. Ускорение |
|
ω |
||
|
Vr |
|||
Кориолиса aC = 2ωe ×Vr направлено по |
А |
ФC |
||
параллели на запад, а сила инерции Кориолиса |
||||
направлена в противоположную сторону – на |
аC |
|
М |
|
восток. Следовательно, материальная точка |
φ |
|||
|
||||
при своем движении будет отклоняться на |
О |
|
||
восток. Расчеты показывают, что сила |
|
|
|
|
инерции Кориолиса мала по сравнению с |
|
|
|
|
силой тяжести, поэтому в большинстве |
|
|
|
|
инженерных расчетов, где скорость движения |
|
|
|
|
невелика, силой инерции пренебрегают, и |
Рис.2.3 |
|
||
систему, связанную с Землей, считают |
|
|
|
|
инерциальной. Однако учет вращения Земли приобретает значение в тех |
||||
случаях, когда движение продолжается длительное время и действие силы |
||||
инерции Кориолиса накапливается. Этим обстоятельством объясняется то, |
||||
что в северном полушарии реки размывают правый берег, в южном – левый. Точно также в северном полушарии при движении по железной дороге давление на правый рельс больше, чем на левый.
Силу инерции Кориолиса также необходимо учитывать при стрельбе на дальние расстояния, например, при расчете траекторий межконтинентальных баллистических ракет.
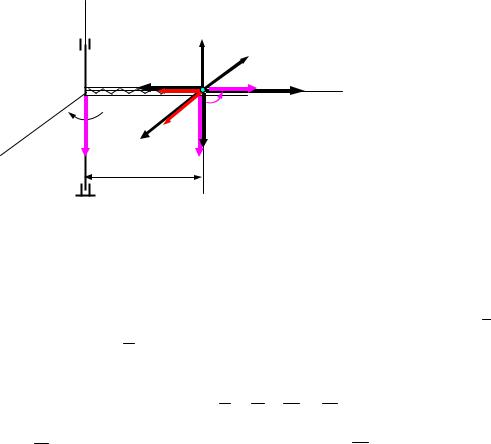
Пример решения задачи на динамику относительного движения материальной точки.
Шарик массой m = 0,1 кг, прикрепленный к концу горизонтальной пружины, коэффициент жесткости которой с = 2 Н/м, находится в трубке, вращающейся с постоянной угловой скоростью ω = 4 1/c вокруг вертикальной оси z1. Длина недеформированной пружины l0 = 0,2 м.
Определить уравнение относительного движения шарика, найти его координату, давление на стенку трубки, а также абсолютную скорость и абсолютное ускорение в момент времени t = 0,2 c.
|
|
|
|
|
|
|
Решение. |
|
z |
|
Nz |
|
|
|
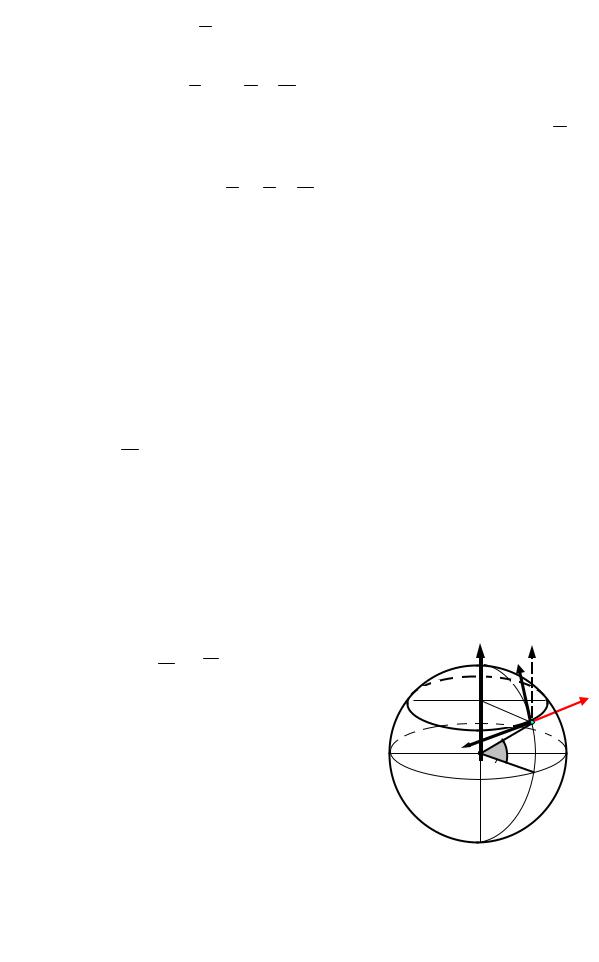
Свяжем подвижную |
|
|
|
Фс |
|
|
систему отсчета Oxyz с |
|
|
|
F |
М |
Vr |
Фе |
x |
вращающейся трубкой, |
|
О |
направив ось х вдоль |
|||||
|
|
aen |
|
|
|
|
трубки и поместив начало |
у |
|
Ny |
aс |
mg |
|
|
координат в точке О |
ωe |
x |
ωe |
|
|
|
(рис.4), ось z совместим с |
|
|
|
|
|
осью вращения трубки, ось |
|||
|
|
|
|
|
|
|
у проведем |
|
|
|
|
|
|
|
перпендикулярно |
|
Рис.4 |
|
|
|
|
|
плоскости Охz. |
Движение шарика, принимаемого за материальную точку М, внутри трубки является относительным, переносным - вращательное движение трубки вокруг оси Oz. На точку действуют сила тяжести mg , сила упругости F , и реакция стенки трубки N .
Основной закон относительного движения точки:
mar = mg + F + N +Фе +Фс , (а)
где Фе = −mae - переносная сила инерции; Фс = −maс - сила инерции Кориолиса.
Переносная сила инерции направлена противоположно переносному ускорению точки. Так как вращение трубки происходит с постоянной
угловой скоростью, то переносное ускорение является нормальным и
направлено по оси х к точке О. Следовательно, Фе направлена по оси х вправо.
Нормальное ускорение точки равно: aen =ωe2 OM =ωe2 x . Модуль Фе = maе= mωe2 x .
Ускорение Кориолиса определяется векторным равенством aс = 2ωe ×Vr ,
в соответствии с которым вектор aс в данном случае направлен
перпендикулярно плоскости Охz в положительном направлении оси Оу (рис.4), следовательно, сила инерции Кориолиса направлена за чертеж.
Модуль силы инерции Кориолиса равен Фс = 2mωeVr , так как векторы ωe и Vr перпендикулярны.
Под действием силы инерции Кориолиса шарик будет прижиматься к задней стенке трубки, поэтому полную нормальную реакцию стенки разложим на две взаимно-перпендикулярные составляющие N y и N z .
N = N y + N z
Сила упругости равна коэффициенту жесткости пружины, умноженному на ее удлинение F = c l , и направлена в сторону, противоположную удлинению, величина которого l = c(x −l0 ) .
Составим дифференциальное уравнение относительного движения шарика:
|
&& |
=Фe − F |
|
|
mx |
||
или |
&& |
2 |
x −c(x −l0 ) . |
mx |
= mωe |
||
После сокращения на m и элементарных преобразований получим
&& |
|
c |
|
2 |
|
c |
|
+( m |
−ω |
|
)x = m l0 |
||||
x |
|
||||||
Подставим численные значения |
|
|
(б) |
||||
x + 4x = 4 . |
|
|
|
||||
&& |
|
|
|
|
|
|
|
Общее решение полученного дифференциального уравнения имеет вид:
х = х1+ х2. |
(в) |
где х1 – общее решение соответствующего однородного дифференциального уравнения, х2 – частное решение дифференциального уравнения (б).
Составим характеристическое уравнение и найдем его корни:
r 2 + 4r = 0 . r = ±2 i .
Таким образом, общее решение однородного уравнения имеет вид
х1 =С1соs 2t + C2 sin2t
Частное решение уравнения (б) находим в форме х2 = В. Здесь B-
постоянная величина. Подставим это значение в уравнение (б), учитывая, |
||
что х2 = 0 , получим В = 1. |
|
|
&& |
|
|
Решение (в) дифференциального уравнения относительного движения |
||
точки М принимает вид |
|
|
х = С1соs 2t + C2 sin2t +1. |
|
(г) |
Скорость этого движения |
|
(д) |
& |
|
|
х = -2С1 sin2t +C2cos2t . |
|
|
Подставив начальные условия t = 0, х0 = 0,2 м, |
& |
= 0 в уравнения (г) и (д), |
х0 |
||
получим значения постоянных интегрирования:
С1 = - 0,8, С2 =0.
Уравнение относительного движения точки М принимает вид:
х = - 0,8 соs 2t +1. |
Vr |
= x =1,6sin 2t . |
||||
Скорость относительного движения шарика |
||||||
|
|
|
|
|
|
& |
Относительное ускорение |
|
|
|
|
|
|
ar = |
dVr |
= |
d |
(1,6sin 2t) = 3,2cos 2t . |
||
dt |
|
|||||
|
|
dt |
|
|
||
При t = 0,2 c: |
|
|
|
|
|
|
х = - 0,8соs 0,4 + 1 = - 0,8 cos 22,90 + 1 = 0,264. м. Vr = 1,6 sin 0,4 = 1,6 sin 22,90 = 1,024 м/c.
аr = 3,2 cos 0,4 =3,2 cos22,90 = 2,94 м/c.
Ускорение Кориолиса при t = 0,2 c. Равно ас =2 ωe Vr = 8,1 м/c.
Для определения составляющих реакции стенки трубки N y и N z запишем проекции векторного равенства (а) на оси у и z .
0 = Ny –Фс, 0 = Nz –mg, откуда Ny = Фс, Nz = mg.
Сила инерции Кориолиса
Фс = 2m ωeVr = 2·0,1· 4 ·1,024 =0,81H. Следовательно, Ny = Фс = 0,81(Н), Nz = mg = 9,81(Н).
Реакция стенки трубки N = N y2 + N z2 =  0,812 +0,9812 =1,2 H Абсолютная скорость шарика
0,812 +0,9812 =1,2 H Абсолютная скорость шарика
V =Vе +Vr
Переносная скорость Ve перпендикулярна ОМ и направлена в сторону вращения трубки.
Ve = ωe OM = ωe x = 4· 0,264 = 1,056 м/с.
Так как векторы Vе и Vr взаимно перпендикулярны, то модуль
абсолютной скорости точки |
V = Ve2 +Vr2 = 1,47 м/c. |
Абсолютное ускорение шарика
a = ae +ar +aс .
Модуль переносного ускорения равен
ае= ωe2 ОМ = ωe2 х1= 4,22 м/c.
Найдем проекции абсолютного ускорения на оси Ох и Оу:
ах = - ае + аr =-4,33 + 2,94 = - 2,39,
ау = аk = 8,44.
Модуль абсолютного ускорения равен
а =  ах2 + ау2 =
ах2 + ау2 =  (−1,39)2 +8,442 = 8,55 м/ с .
(−1,39)2 +8,442 = 8,55 м/ с .
Контрольные вопросы.
1.Какая система отсчета называется инерциальной?
2.Какая система отсчета не является инерциальной?
3.Какое движение точки называется относительным?
4.Записать основной закон относительного движения точки.
5.Какое движение точки называется переносным?
6.Что называется переносной силой инерции?
7.Чему равна и как направлена переносная сила инерции, если переносное движение является поступательным?
8.Как определяется переносная сила инерции, если переносное движение является равномерным вращением вокруг неподвижной оси?
9.Что называется силой инерции Кориолиса?
10.Как направлен вектор угловой скорости?
11.Как направлена сила инерции Кориолиса?
12.Записать модуль силы инерции Кориолиса.
13.Записать дифференциальные уравнения движения материальной точки относительно системы координат, движущейся поступательно
14.Записать дифференциальные уравнения движения точки относительно системы координат, совершающей вращение вокруг неподвижной оси.