

Термех / Кинематика_твердого_тела
.pdfМинистерство образования Российской Федерации. Государственное образовательное учреждение высшего профессионального образования
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра «МЕХАНИКА»
К И Н Е М А Т И К А ТВЕРДОГО ТЕЛА
Данное пособие входит в серию электронных учебных пособий по теоретической механике, разрабатываемых на кафедре механики СамГТУ.
В пособии излагаются две темы из раздела «Кинематика твердого тела»: 1) поступательное движение твердого тела, 2) вращательное движение твердого тела.
Пособие предназначено для студентов всех специальностей и всех форм обучения, изучающих теоретическую механику.
Зав. кафедрой – д.т.н., проф. Я.М.Клебанов, Разработчики – Л.Б.Черняховская, Л.А.Шабанов.
Самара – 2008.
1. ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Поступательным называется такое движение твердого тела, при котором любая прямая, жестко связанная с телом, перемещается параллельно самой себе.
Основное свойство: при поступательном движении все точки тела движутся одинаково, т.е. описывают одинаковые траектории и имеют геометрически равные скорости и ускорения.
Поступательное движение характеризуется движением любой его точки, поэтому для определения кинематических характеристик поступательного движения достаточно определить соответствующие характеристики одной из его точек.
Пример.
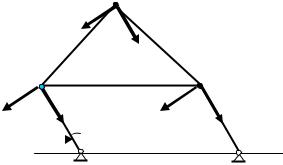
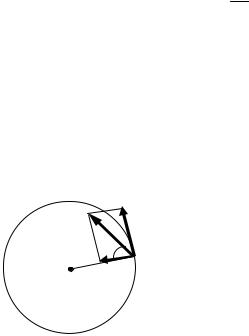
Точка А кривошипа движется со скоростью VA = 0,8 м/с. ОА =0,4 м. Определить траекторию, скорость и ускорение точки М.
Решение.
VМ |
М |
|
аМ |
|
|
|
|
|
А |
VB |
В |
VA |
aВ |
|
аА |
|
|
|
С |
|
О |
|
Движение треугольной пластины ABM, соединенной шарнирно с кривошипами ОА и СВ, является поступательным, поэтому его можно характеризовать движением точки А. Точка описывает окружность радиуса ОА, скорость точки направлена по касательной к этой окружности, т.е. перпендикулярно ОА.
Скорости всех точек пластины одинаковы и равны скорости точки А.
Рис.1 |
VМ = VD = VA. |
Точка А движется с постоянной скоростью, поэтому она имеет нормальное ускорение, направленное по кривошипу к точке О.
аА = |
V 2 |
= |
0,64 |
= (1,6 м/ c2 ) |
|
R |
0,4 |
||||
|
|
|
Ускорения всех точек пластины одинаковы и равны ускорению точки А:
аМ = аВ = aA.
2. ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Вращательным называется такое движение твердого тела, при котором две принадлежащие телу точки остаются неподвижными.
Прямая, проходящая через эти неподвижные точки, называется осью враще- |
|||||||
ния. |
|
|
|
|
|
|
|
2.1. Угловая скорость и угловое ускорение вращающегося твердого |
|||||||
тела |
|
|
|
|
|
||
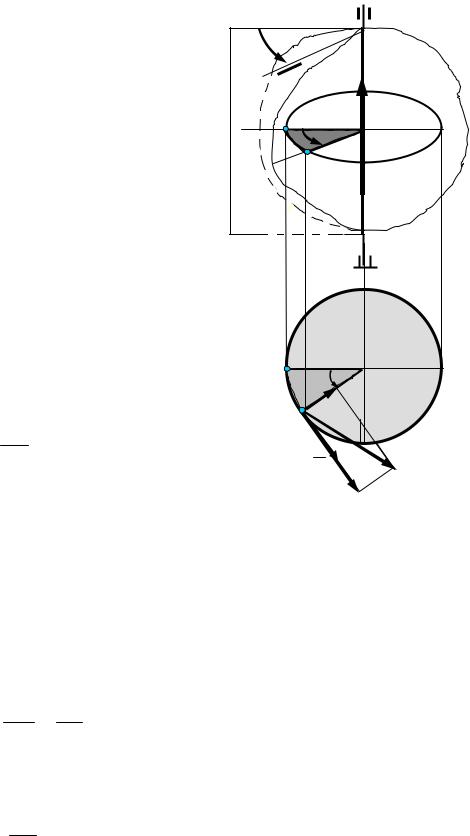
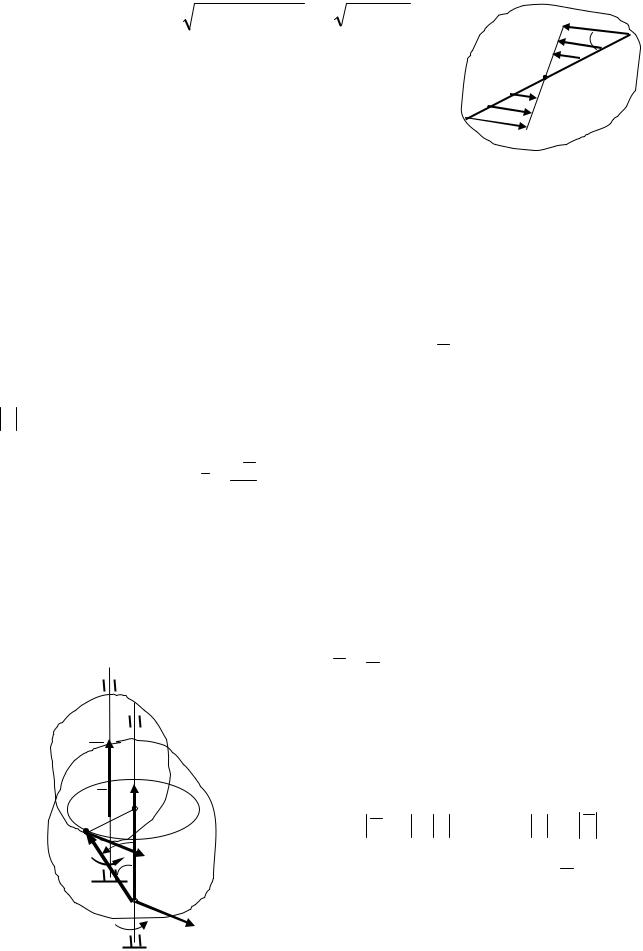
При движении твердого тела, закрепленного в двух неподвижных точках А и В |
|||||||
(рис.1), все точки, расположенные на прямой |
|
A |
|||||
АВ, остаются неподвижными. |
|
φ |
|
||||
Проведем через ось вращения неподвижную |
|
|
|||||
плоскость 1 и плоскость П, жестко связанную |
|
ω |
|||||
с телом. Положение подвижной плоскости |
|
|
|||||
относительно |
неподвижной |
определяется |
MO h |
С |
|||
углом поворота φ. Угол φ измеряется в |
φ |
|
|||||
радианах и считается положительным при |
М |
|
|||||
условии, что он отсчитывается в направлении |
|
|
|||||
против часовой стрелки, если смотреть с |
1 |
|
|||||
положительного конца оси вращения Аz. |
|
||||||
|
Зависимость угла поворота от време- |
П |
B |
||||
ни |
называется |
законом |
вращательного |
||||
|
|
||||||
движения: |
|
|
|
|
|
||
|
|
|
ϕ =ϕ(t) |
|
|
|
|
Угловой |
скоростью вращательного |
MO |
h |
a τ |
C |
|
движения называется производная от угла |
|
a n |
φ |
|
||
поворота по времени: |
|
|
|
|
||
|
M |
|
|
|
||
|
dϕ |
|
|
|
|
|
|
& |
|
|
|
a |
|
|
ω = dt |
=ϕ. |
|
V |
|
|
Знак ω определяет направление вращения: |
|
|
a τ |
|
||
если ω > 0 |
вращение |
происходит против |
|
|
|
|
часовой стрелки, если ω < 0, то тело вращает- |
Рис.1 |
|
ся по часовой стрелке. |
||
|
Если угол поворота измеряется в радианах, а время - в секундах, то единицей угловой скорости будет
[ω]=1/ сек = сек−1.
В технике угловую скорость определяют числом оборотов в минуту, обозначая эту величину как n об/мин. Зависимость между угловой скоростью и числом оборотов в минуту определяется по формуле:
ω = 260πn = π30n 1/cек.
Изменение угловой скорости характеризуется угловым ускорением.
Угловым ускорением называется производная от угловой скорости по времени:
ε = ddtω .
Учтем, что |
ω = |
dϕ |
, тогда ε = |
dω |
= |
d 2ϕ |
, или |
& && |
|
||||||||
dt |
dt |
dt2 |
ε =ω =ϕ . |
|||||
|
|
|
|
|
|
Единица измерения углового ускорения:
[ε] = 1/c2 = с-2 .
Вращение будет ускоренным, если угловая скорость и угловое ускорение будут иметь одинаковые знаки: ω > 0, ε > 0 или ω < 0, ε < 0.
Вращение будет замедленным, если: ω > 0, ε < 0 или ω < 0, ε > 0.
2.2. Скорости точек при вращательном движении
Все точки вращающегося твердого тела описывают окружности, плоскости которых перпендикулярны оси вращения, а центры лежат на этой оси.
В самом деле, в силу неизменяемости расстояний точки М от неподвижных точек А и В, точка М должна постоянно оставаться как на поверхности сферы, описанной из точки А радиусом АМ, так и на поверхности сферы, описанной их точки В радиусом ВМ. Следовательно, точка М остается на линии пересечения обеих сфер, т.е. на окружности, плоскость которой перпендикулярна к прямой АВ, центр лежит на этой прямой, а радиус равен расстоянию точки до оси вращения.
Положение точки М, находящейся на окружности радиуса h (рис. 1), в соответствии с естественным способом задания, определяется длиной дуги окружности, отсчитываемой от начального положения МО, находящегося на неподвижной плоскости:
S = MO M = hϕ .
Скорость точки М, движущейся по окружности радиуса h, определяется по формуле
V = dSdt = h ddtϕ = h ω
Скорость точки вращающегося твердого тела равна произведению угловой скорости тела на ее
радиус вращения
V = hω
Вектор скорости лежит в плоскости, перпендикулярной оси вращения и направлен по касательной к описываемой точкой окружности в направлении
С


 V
V
Рис.2
вращения.
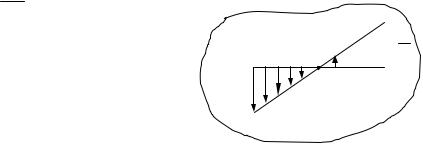
Так как угловая скорость ω для всех точек тела имеет в данный момент одно и то же значение, то скорости точек вращающегося твердого тела пропорциональны радиусам вращения. Поле скоростей точек вращающегося твердого тела имеет вид, показанный на рис.2.
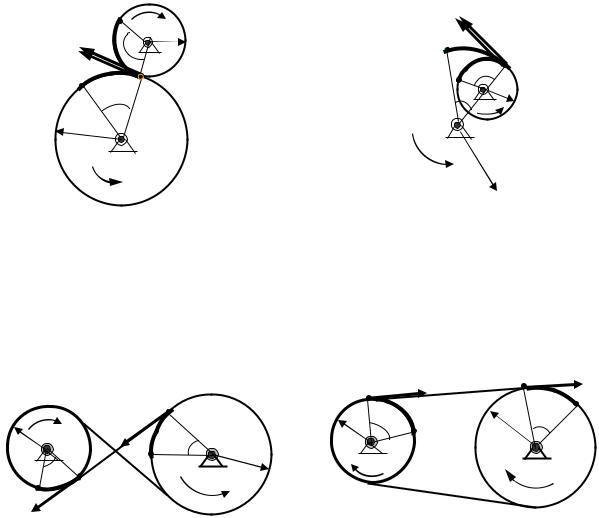
2.3. Передача вращательного движения от одного тела к другому осуществляется непосредственным контактом (зубчатые и фрикционные зацепления см. рис .6 и рис.7) или при помощи ременной передачи (рис.8).
|
V2 |
V1 |
|
V2 |
R2 |
|
|
φ2 |
K |
||
V1 |
K2 |
||
φ2 |
|||
|
K1 |
φ1 R2 |
|
R1 |
φ1 |
|
R1
Рис.6 |
Рис.7 |
При внешнем зацеплении (рис. 6) и скрещивающейся ременной передаче (рис.9) вращение колес противоположно по направлению, при внутреннем зацеплении (рис. 7) и нескрещивающейся ременной передаче (рис.8) направления вращения колес совпадают.
|
|
|
V1 |
|
|
|
V2 |
|
V1 |
φ2 |
φ1 |
|
R1 |
||
R2 |
φ1 |
R2 |
|
|
R1 |
|
|
|
|
|
|
|
φ2 |
|
|
V2 |
|
|
|
|
Рис.9 |
|
Рис.8 |
|
|
|
При отсутствии проскальзывания пути, проходимые за одинаковый промежуток времени точками, расположенными на ободах сцепленных колес для всех видов сцепления, равны:
S1 = S2. S1 = R1ϕ1 , S2 = R2ϕ2 ,
где φ1 и φ2 - углы, на которые опираются дуги окружностей, описываемые контактирующими точками.
R1ϕ1 = R2ϕ2 .
Полученное равенство связывают углы поворота контактирующих тел.
Скорости точек, лежащих на соединенных ободах обоих тел для всех видов сцепления равны:
|
|
dS1 |
= |
dS2 |
|
, V1 =V2 . |
||
|
|
|
dt |
dt |
||||
|
|
|
|
|
|
|
||
R1 |
dϕ1 |
|
= R2 |
dϕ2 |
|
, ω1 R1 =ω2 R2 . |
||
dt |
|
|
dt |
|
||||
|
|
|
|
|
|
|
||
Угловые скорости тел, находящихся в зацеплении, обратно пропорциональны их радиусам.
=R2 .
ω2 R1
2.4.Ускорения точек вращающегося тела.ω1
Ускорение точки, движущейся по окружности, раскладывается на нормальную и касательную составляющие:
aa τ
Оh aμn  М
М
Рис.10
a = a τ |
+ a n . |
|||||||||
Эти составляющие вычисляются по формулам, |
||||||||||
определяемым естественным способом задания: |
||||||||||
aτ = |
dV |
; |
a n = |
V 2 |
. |
|||||
|
|
|
|
|||||||
|
|
dt |
|
|
ρ |
|||||
Подставим в эти формулы значение скорости |
||||||||||
точки вращающегося тела |
V =ωh и, учитывая, что |
|||||||||
ρ = h, получим: |
d |
|
|
|
dω |
|
|
|||
aτ = |
(ωh) =h |
= h ε; |
||||||||
|
|
|||||||||
|
dt |
|
|
dt |
||||||
a n = |
ω2 h 2 |
=ω2 h. |
||||||||
|
|
h |
||||||||
|
|
|
|
|
|
|
|
|||
Окончательно касательное и нормальное ускорения определяются по формулам:
aτ =ε h; an =ω2 h.
Касательное ускорение (рис.10) направлено перпендикулярно радиусу враще-
ния и совпадает с вектором скорости, если вращение тела является ускоренным; касательное ускорение противоположно вектору скорости при замедленном вращении.
Нормальное ускорение всегда направлено по радиусу к центру вращения.
a τ a n
Модуль полного ускорения точки М (рис. 10):
a = (an )2 +(aτ)2 =h ω4 +ε2 . |
a |
|||||||
|
|
|
|
|
|
|
μ |
|
Вектор полного ускорения образует с радиусом h угол |
О |
|||||||
μ, определяемый соотношением (рис.3): |
|
|
|
|||||
tgμ = |
aτ |
= |
ε h |
= |
ε |
|
|
|
a n |
ω2 h |
ω2 |
Рис.11 |
|||||
|
|
|
||||||
|
|
|
|
|
|
|
||
В данный момент времени значения ε |
и ω для всех |
|
||||||
точек одинаковы, следовательно, угол μ также одинаков для всех точек, а модули ускорений точек пропорциональны радиусам вращения. Поле ускорений показано на рис. 11.
5*. Векторные формулы
Угловую скорость можно представить в виде вектора ω .
Вектор угловой скорости направлен по оси вращения в ту сторону, откуда вращение тела видно против часовой стрелки (рис.5), а его модуль равен
ω .
Угловое ускорение тела также можно представить в виде вектора
ε = ddtω .
Направление вектора углового ускорения совпадает с направлением вектора угловой скорости, если тело вращается ускоренно (рис.12), и эти векторы противоположны по направлению, если вращение тела – замедленное.
Вектор скорости точки вращающегося тела равен векторному произведению вектора угловой скорости тела на радиус – вектор, проведенный из любой точки, взятой на оси вращения, в данную точку.
ω
hε С ω
С ω
M
r α V
Рис.12О
ω x r
V =ω ×r
Доказательство. Два вектора равны, если они равны по величине и одинаковы по направлению.
Модуль векторного произведения:
ω ×r = ω r sinα = ωh = V .
Векторное произведениеω ×r направлено по перпендикуляру к плоскости
Рис.12
треугольника ОМС, где лежат перемножаемые векторы, в сторону, откуда совмещение вектора угловой скорости с радиусом - вектором на меньший угол видно против часовой стрелки.
Вектор скорости V лежит в плоскости, перпендикулярной оси вращения, и направлен по касательной к окружности в сторону вращения тела (перпендику-
лярен радиусу h).Следовательно, направления векторов ω ×r и V совпадают, значит V =ω ×r .
Аналогично докажем, что вектор касательного ускорения выражается в виде
векторного произведения: aτ =ε ×r .
Действительно:
h
M
r α
ε ×r = ε r sinα = ε h = aτ .
Вектор ε ×r направлен (рис.13) по касательной
ωк окружности, по которой движется точка и совпада-
Сет по направлению с вектором скорости точки, если
ε |
векторы |
ω |
и ε |
направлены в одну сторону, |
что со- |
||||
ответствует ускоренному вращению тела. |
Вектор |
||||||||
aτ |
|||||||||
V |
ε |
× |
r |
направлен противоположно вектору скорости, |
|||||
|
если |
вращение тела является замедленным, |
т.е. век- |
||||||
Оторы ω и ε противоположны по направлению.
 ε x r
ε x r
Рис.13
ω ω
an С
ωx r  h
h
M
V
Рис.15
Вектор нормального ускорения точки также можно представить в виде векторного произведения:
a n = ω ×V
Действительно
ω ×V = ω
 V sin 900 =ωωh =ω2 h = an .
V sin 900 =ωωh =ω2 h = an .
Векторное произведение ω ×V перпендику-
лярно векторам ω и V и направлено по этому перпендикуляру так, чтобы с его конца совмещение
вектора ω с вектором V на меньший угол было видно против часовой стрелки. В соответствии с этим правилом вектор ω ×V направлен по радиусу вращения точки к центру окружности (рис.15),
т.е. совпадает с вектором a n .
Полное ускорение равно сумме касательного и нормального ускорений, следовательно
a =ε ×r +ω ×V .
6.Основные определения и формулы
Вэтом пункте дана сводка основных определений и формул.
1.Вращательным называется такое движение твердого тела, при котором две его точки остаются неподвижными.
2.Осью вращения называется прямая, проходящая через неподвижные точки.
3.Углом поворота φ называется угол между двумя проведенными через ось вращения плоскостями: неподвижной плоскостью и плоскостью, жестко связанной с телом.
4.Уравнением вращательного движения называется зависимость уг-
ла поворота от времени |
ϕ =ϕ (t) |
5.Угловой скоростью называется производная от угла поворота по времени
ω= ddtϕ =ϕ&
6.Угловым ускорением называется производная от угловой скорости
по времени
ε = ddtω .
Вращательное движение будет ускоренным, если ω и ε имеют одинаковые знаки, вращение – замедленное, если ω и ε имеют разные знаки.
7.Траекторией любой точки вращающегося твердого тела является окружность, плоскость которой перпендикулярна оси вращения, а радиус h которой равен кратчайшему расстоянию до оси вращения и называется радиусом вращения точки.
8.Скорость точки направлена по касательной к окружности (перпендикулярно радиусу вращения)
V
 h
h 
8. Модуль скорости точки равен произведению угловой скорости те-
ла на радиус вращения точки.
V =
= ω
ω h
h
9. Скорости точек пропорциональны их радиусам вращения.
VA = hA VB hB
10. Ускорение раскладывается на нормальную и касательную составляющие a =
= a
a τ
τ
 +
+ a
a n
n 
11. Вектор касательного ускорения совпадает с вектором скорости, если вращение тела ускоренное, и противоположен вектору скорости,
если вращение замедленное, но всегда aτ
 h
h

12. |
Касательное ускорение равно |
|
aτ =εh |
13. |
Нормальное ускорение направлено по радиусу вращения к центру |
и равно |
an =ω2 h. |
14.Модуль полного ускорения:
a =
= h
h
 ω4 +
ω4 + ε2
ε2  .
.
16.Ускорения точек пропорциональны радиусам вращения:
aτ |
aτ |
a |
A |
|
h |
A |
||
A |
= |
A |
= |
|
= |
|
||
|
|
aB |
hB |
|||||
aτB |
aτB |
|
||||||
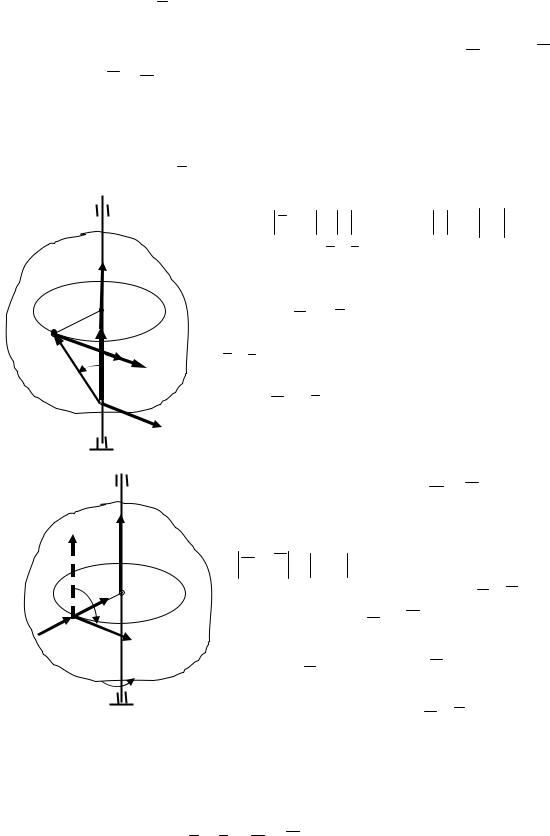
7. Пример на определение скоростей и ускорений точек вращающихся тел.
Две одинаковые круглые пластины радиуса R вращаются, как показано на рис.16 и рис.17, с одинаковыми угловыми скоростями ω и одинаковыми угловыми ускорениями ε. Определить скорость точки М, расположенной на каждой пластине, как показано на рисунках.
М |
|
М |
450 |
45 |
0 |
С |
|
|
С |
|
О |
|
Рис.16 |
Рис.17 |
|
Решение. Значения скорости, нормального и касательного ускорений точки
определяются по формулам: V =ωh , an =ω2 h , aτ = ε h .
Так как в обоих случаях угловые скорости и угловые ускорения заданы, то для определения всех характеристик необходимо определить радиусы вращения точек в обоих случаях.
В первом случае (рис.16) ось вращения пластинки, проходит через точку О перпендикулярно плоскости чертежа, радиус вращения h точки М, определяемый как перпендикуляр, опущенный из точки М на ось вращения, равен отрезку
ОМ. Треугольник ОСМ является равнобедренным, углы при основании равны α
= 22,50.