

Психоакустическое сглаживание спектра
73

Психоакустическое сглаживание спектра
Сравнение обычного и перцептивного ЛП
Метод перцептивного линейного предсказания 5-го порядка, позволяет получить формантные кривые такие же гладкие, как и
стандартный ЛП-кодер 13 порядка
74

Принятие решения
1.Динамическое программирование
2.Байесовское правило
3.Скрытые Марковские модели
75

Принятие решения
Ключевым вопросом в распознавании |
|
речи является вопрос сравнения |
|
входного образа с эталонными |
|
образами с целью выяснения степени |
|
их подобия |
|
Обычно входной и эталонный образы |
|
имеют разную длину |
|
Сравниваемые образы не могут быть |
|
нормализованы по длительности, |
|
поскольку различные типы звуков |
|
имеет различные возможности по |
|
удлинению произнесения |
|
Необходимо найти способ сравнения |
|
спектральных векторов такой, чтобы |
|
можно было вычислять глобальную |
75 |
меру совпадения образов. |
Динамическое программирование
76

Динамическое программирование
Процедура динамического программирования сводится к нелинейному нормированию во времени двух развертывающихся во времени речевых процессов - входного и эталонного речевых событий.
При обучении некоторым образом формируются эталонные |
|
образы слов в виде последовательности векторов |
|
E e(1),e(2,...,e(N )) |
e(N) |
параметров речевого сигнала |
. Каждый |
вектор описывает речевой сигнал на интервале наблюдения, длительность которого обычно выбирается равной среднему периоду основного тона, равному 15 мсек.
77

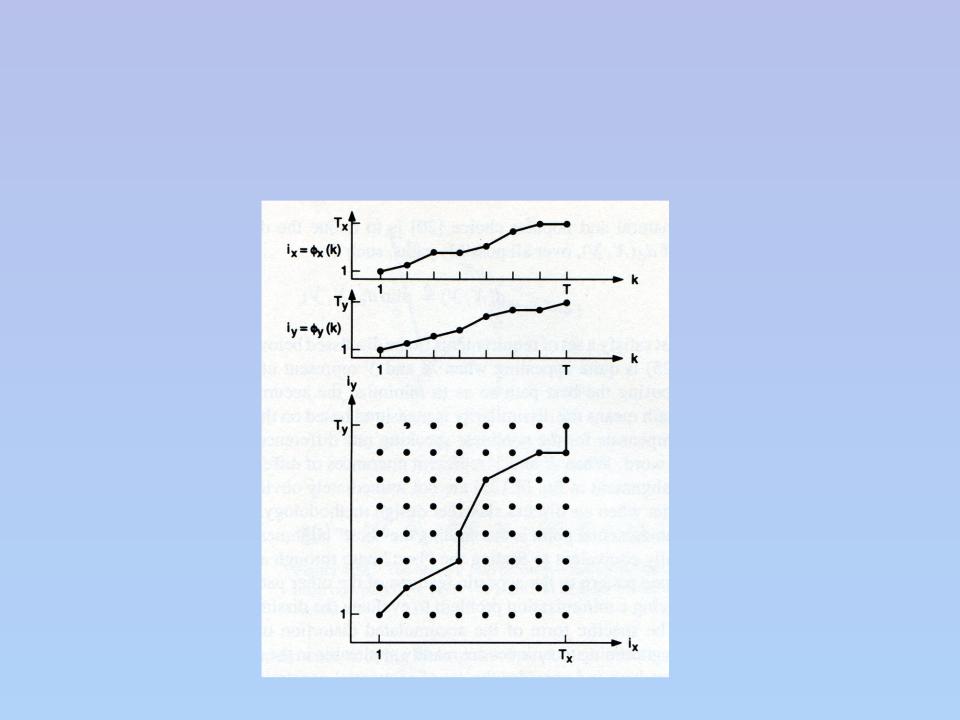
Динамическое программирование
При распознавании последовательность входных векторов
Rn r(1),r(2),..., r(M ) |
сравнивается с эталонной |
|
|
||||
последовательностью на плоскости, вдоль осей которой |
|
||||||
откладываются входная R и эталонная E |
|
|
|||||
|
|
|
|
A c(1),c(2),...,c(k)...,c(K ) |
|
|
|
последовательности. Последовательность точек |
|
|
|||||
c(k) (m(k),n(k)) |
, где |
|
m(k),n(k) |
|
|
||
c(K ) (M , N ) |
, и |
– точки |
|
||||
|
|
|
, |
|
|
||
на осях, соответствующие сравниваемым векторам |
|
|
|||||
параметров последовательностей, задает функцию |
|
||||||
деформации, определяющую временное согласование |
|
||||||
e(n) |
r(m) |
|
|
|
|
|
|
сравниваемых образов. |
|
|
|
|
|||
d(m,n) |
ВNкачестве меры расхождения между векторами |
|
|||||
| ei (n) ri (m) | |
|
|
|
|
|||
признаков |
|
|
|
|
|
|
|
и |
i 1 |
вводится расстояние между ними, например, |
78 |
||||

Динамическое программирование
В качестве меры расхождения между векторами признаков e(n) иr(m) вводится расстояние между ними, например,
|
N |
|
|
d(m,n) | ei (n) ri (m) | |
|
|
i 1 |
|
гдеei (n) иr (m) |
– компоненты векторовe(n) r(mи) |
, |
i |
|
|
соответственно.
Взвешенная сумма расстояний для функции деформации:
K |
|
D(A) d(c(k))w(k) |
|
k 1 |
|
где w(k) – весовой коэффициент |
79 |

Динамическое программирование
80

Динамическое программирование
81