

Levitskiy_chm3-1
.pdf51
определенное для производной от нулевой компоненты z, то есть от z0, затем – от z1 и так далее. Следует отметить, что отсчет индексов в MathCAD определяется параметром ORIGIN и обычно по умолчанию начинается с нуля.
Функция rkfixed возвращает найденное решение в виде двухмерного массива (см. рис. 4, а). В приведенном примере результат передается переменной F1. Значения независимой переменной t размещаются в нулевом
столбце F<0> массива. Они изменяются в пределах от t0 до tk с шагом
(tk – t0) / N. В приведенном примере t0 = 0, tk = 5·10–6 c, N = N1 = 500,
поэтому шаг изменения аргумента равен (tk –t0) / N1 = 5·10–6 / 500 = 10–8 с. Найденное численно решение z0(t) и первая производная z1(t) записы-
ваются соответственно в первом и во втором столбцах – F1<1> и F1<2>. Результат решения методом Рунге-Кутта показан графически на рис. 4, б.
|
|
|
|
а |
б |
||
Рис. 4. Решение задачи Коши в MathCAD |
|
|
|
Выполним аналогичный расчет с уменьшенным |
вдвое шагом при |
||
N = N2 = 1000 и оценим погрешность решения по правилу Рунге (11):
Таким образом, погрешность решения ∆ при шаге h/2 не превышает 10–9. Рассмотрим решение этой же задачи методом Эйлера с использованием
рекурсивной процедуры. Изменив для удобства записи обозначения переменных z0 → Y0 и z1 → Y1, преобразуем систему уравнений (17):
dY 0 |
=Y1 |
|
|
|
Y 0i+1 −Y 0i ≈Y1 |
|
|
|
|
Y 0i+1 ≈Y 0i + ∆t Y1i |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
∆t |
|
|
|
|
|
|
|
|
R |
|
|
1 |
|
||
dY1 |
= − |
R |
Y1− |
1 |
Y 0 |
Y1i+1 −Y1i |
≈ − |
R |
Y1i |
− |
1 |
Y 0i |
Y1i+1 |
≈Y1i |
− ∆t |
|
Y1i |
+ |
|
Y 0i . |
||
L |
LC |
|||||||||||||||||||||
|
L |
LC |
|
∆t |
L |
LC |
|
|
|
|
|
|
||||||||||
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
52
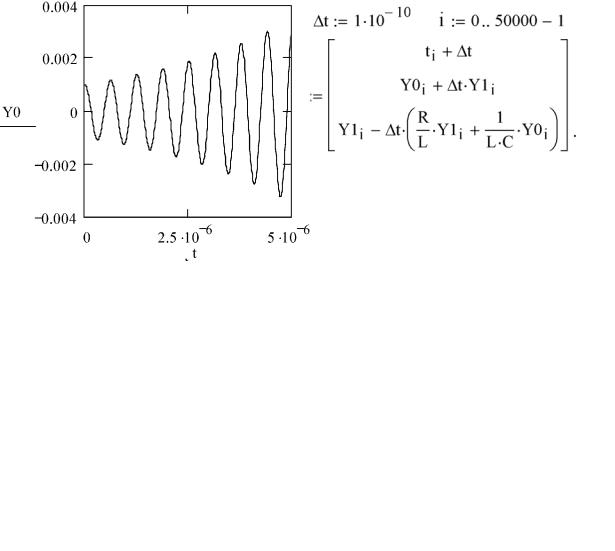
Здесь использована замена производных на их приближенные аналоги dY/dt ≈ ∆Y/∆t. Благодаря этому решение задачи можно представить в MathCAD следующим образом:
В данной записи, соответствующей методу Эйлера (5), параметр ∆t – шаг интегрирования, i – счетчик точек решения. Начальные значения переменных t, Y0 и Y1 заданы одновременным присваиванием. Использованная в примере рекурсивная ("возвратная") процедура вычисляет последующие точки решения с индексом i+1 из предыдущих с индексом i.
Рассчитанные методом Эйлера зависимости Y0(t) приведены на рис. 5.
|
|
|
|
|
|
а |
|
б |
Рис. 5. Расчет методом Эйлера
Зависимость, представленная на рис. 5, а получена при ∆t = h = 10–10 с, а на рис. 5, б – при ∆t = h = 7 · 10–9 с. В последнем случае неприемлемый с физической точки зрения результат объясняется выбором слишком большого шага интегрирования (см. п. 1.2.4). Метод Эйлера дает корректный результат при h = 10–10 с, то есть расчете порядка 50000 точек. Однако оценка погрешности такого решения по правилу Рунге дает ∆ ≈ 1,5 · 10–3.
Кроме rkfixed в MathCAD имеется еще ряд функций, обеспечивающих решение задачи Коши. К ним относятся odesolve, rkadapt, Bulstoer, Stiffb и Stiffr. Функциии rkadapt и Bulstoer предназначены для решения задач с гладкими функциями и медленно меняющимися решениями, Stiffb и Stiffr – для задач с жесткими системами. Функция sbval позволяет привести краевую задачу к задаче Коши и решить ее методом стрельбы.
53
1.5.2.Решение задача Коши в MATLAB
ВMATLAB имеется ряд функций для решения задачи Коши. Одна из них – ode45 – использует метод Рунге-Кутта четвёртого-пятого порядка точности с автоматическим выбором размера шага.
Обращение к ode45 выполняется следующим образом (синтаксис приведен для версии 6.Х):
[T,Y] = ode45(ODEFUN,TSPAN,Y0)
Входные параметры процедуры ode45:
ODEFUN – имя функции (в виде строчной переменной), задающей правую часть системы дифференциальных уравнений. Уравнения должны быть записаны в нормальной форме u' = ODEFUN(T,Y), где u' – вычисляемый векторстолбец производных;
TSPAN = [T0 TFINAL] – вектор, задающий интервал изменения независимой переменной. T0 – начальная точка, TFINAL – последнее значение аргумента, при котором завершается расчёт;
Y0 – вектор начальных значений зависимых переменных. Выходные параметры ode45:
T – вектор, содержащий отсчёты аргумента в точках решения;
Y – массив, содержащий вычисленные значения u и u' в точках, соответствующих отсчетам независимой переменной в T.
Требования к точности и другие параметры численного решения задаются в MATLAB по умолчанию. Изменить эти настройки позволяет допол-
нительный аргумент OPTIONS (см. help ODESET).
Рассмотрим дифференциальное уравнение второго порядка, описывающее колебания в нелинейной системе (например, автогенераторе), и известное как уравнение Ван-дер-Поля:
u" + (u2 – b) u' + u = 0 ,
где u, u' и u" – функция, её первая и вторая производные по времени t, b – произвольный параметр. Параметр b определяет потери в системе, а слагаемое u2 в скобках – её нелинейные свойства (например, рабочие характеристики активного элемента автогенератора).
Данное дифференциальное уравнение второго порядка можно привести к системе двух дифференциальных уравнений первого порядка
|
|
2 |
)y1 − y2 |
y1 |
' = (1− y2 |
||
|
|
' = y |
, |
y |
2 |
||
|
1 |
|
|
где y1 = u' и y2 = u, а параметр b принят равным единице.
Для выполнения расчётов воспользуемся внешней функцией vdp1, записанной в m-файле vdp1.m. Эта функция, вычисляющая правую часть уравнения Ван-дер-Поля, имеет следующий вид:
function dydt = vdp1(t,y)
dydt = [y(2); (1-y(1)^2)*y(2)-y(1)] .
54
Для получения решения дифференциального уравнения, описываемого функцией vdp1 на интервале 0 < t <20, при начальных условиях y1 = u' = 2 и y2 = u = 0, следует ввести в MATLAB следующую строку:
[t,y]=ode45(@vdp1,[0 20],[2 0]).
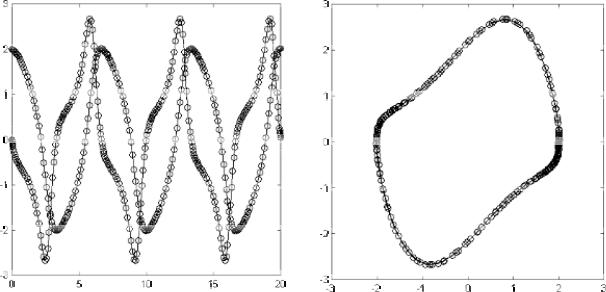
На рис. 6, а представлены рассчитанные функцией ode45 и построенные с помощью команды plot зависимости y2(t) ≡ u(t) и y1(t) ≡ u’(t).
a б
Рис. 6. Результаты решения уравнения Ван-дер-Поля
График на рис. 6, а показывает, что с течением времени колебания в системе нарастают. Однако в дальнейшем рост амплитуды колебаний замедляется и система переходит в устойчивое состояние, описываемое фазовыми кривыми y2 (y1), представленными на рис. 6, б.
Кроме рассмотренной функции ode45 MATLAB содержит ряд других функций для решения задачи Коши – см. ode23, ode113, ode15s, ode23s, ode23t, ode23tb.
2. УКАЗАНИЯ К ВЫПОЛНЕНИЮ РАБОТЫ
2.1. Подготовка к работе
Изучите методы решения уравнений на ЭВМ, используя указанную литературу. Обратите особое внимание на следующие вопросы:
1.Различие обыкновенных дифференциальных уравнений и уравнений
вчастных производных;
2.Отличие формулировок задачи Коши и краевой задачи;
3.Cвойства одно– и многошаговых методов решения задачи Коши;
4.Решение систем обыкновенных дифференциальных уравнений.
55
2.2.Порядок выполнения работы
1.Формализуйте задачу для решения на ЭВМ. При необходимости произведитеее нормировкуидругиепреобразования, облегчающиерешениенаЭВМ.
2.Выберите программную реализацию решения (с помощью специальных процедур в MATLAB, MathCAD или в виде отдельной программы).
3.Выполните расчет на ЭВМ, используя разные шаги интегрирования, оцените погрешность полученного решения.
4.Оформите отчет по работе.
2.3.Содержание отчета
1.Цель работы.
2.Задание.
3.Описание метода решения – сведения из теории (формулы, алгоритм).
4.Распечатка решения задачи на ЭВМ, включая графики и комментарии.
5.Краткие выводы по работе.
2.4.Контрольные вопросы
1.Приведите примеры задач с обыкновенными дифференциальными уравнениями. Чем отличаются формулировки задачи Коши и краевой задачи?
2.Назовите основные различия, достоинства и недостатки одношаговых и многошаговых методов решения задачи Коши.
3.Опишите решение задачи Коши методом Эйлера.
4.Опишите решение задачи Коши модифицированным методом Эйлера.
5.Опишите решение задачи Коши методом Рунге-Кутта.
6.Что такое порядок точности метода и как он связан с его эффективностью? Приведите примеры методов разных порядков.
7.Как влияет размер шага при решении задачи Коши на погрешность результата? Как работает процедура автоматического выбора шага?
8.Составьте алгоритм решения задачи Коши для системы двух уравнений первого порядка методом Эйлера.
9.Опишите процедуру решения задачи Коши для уравнения второго порядка одношаговым методом.
10.Поясните понятие устойчивости решения задачи Коши.
11.Опишите решение задачи одним из многошаговых методов.
12.Опишите решение задачи Коши методом предиктор-корректор.
13. Приведите схему решения краевой задачи методом стрельбы
сиспользованием метода деления отрезка пополам.
14.Приведите схему решения краевой задачи методом стрельбы для линейного дифференциального уравнения.
15.Расскажите об особенностях представления чисел в ЭВМ.
16.Для чего используется нормировка уравнений при решении на ЭВМ?
17.Опишите источники погрешностей при решении задач на ЭВМ.

56
3. ВАРИАНТЫ ЗАДАНИЙ
Ниже приведены варианты заданий. Каждое из заданий включает ряд вариантов, отличающихся друг от друга набором исходных данных. Все параметры в формулах, если не оговорено иное, следует записывать в системе СИ.
Задание 1. Для защиты от вибрации приборный блок установлен специальные на упругие опоры (амортизаторы). Его движение на амортизаторах при отсутствии боковых и крутильных колебаний опи-
сывается дифференциальным уравнением вида
m d2x +βdx +kx =0 , dt2 dt
где x – отклонение блока от исходного положения, t – время, m – масса блока, d2x/dt2 – ускорение, β – коэффициент трения (в амортизаторах), dx/dt – скорость движения при колебаниях блока, kx – слагаемое, отвечающее за сопротивление упругих элементов (пружин), k – коэффициент жесткости амортизаторов. Суммарнаяжесткостьпружинзависитотдеформацииx: k = k0 (1 + ax2).
Решите уравнение при следующих данных: β = 0,5 кг/с; начальные условия x = 1 см, dx/dt = 0 при t = 0. Остальныепараметры заданывтаблице.
Параметр |
|
|
В а р и а н т |
|
|
||
1-1 |
1-2 |
1-3 |
1-4 |
1-5 |
1-6 |
||
|
|||||||
m, кг |
12 |
5 |
7 |
9,5 |
15 |
4 |
|
k0, Н/м |
0,5 |
1 |
1,5 |
1 |
2 |
2 |
|
a, 1/м2 |
1 |
–0,5 |
2 |
2 |
+3 |
–0,5 |
|
Получите точки решения, охватывающие не менее пяти периодов колебаний, и постройте по ним соответствующий участок зависимости x(t).
Задание 2. Приборный блок установлен на упругие опоры (амортизаторы). Его вертикальные колебания описывается дифференциальным уравнением, приведенным в задании 1.
Амортизаторы имеют встроенные демпфирующие элементы. Поэтому коэффициент трения β в системе зависит от деформации x: β = β0 (1 + ax2).
Решите уравнение для следующих исходных данных: коэффициент трения k = 1 Н/м; начальные условия x = 1,5 см и dx/dt = 0 при t = 0. Остальные параметры заданы в таблице.
Параметр |
|
|
В а р и а н т |
|
|
||
2-1 |
2-2 |
2-3 |
2-4 |
2-5 |
2-6 |
||
|
|||||||
m, кг |
5 |
10 |
8,5 |
7 |
3 |
12 |
|
β0, кг/с |
1,5 |
1 |
0,5 |
0,5 |
0,3 |
1 |
|
a, 1/м2 |
0,5 |
1 |
1,5 |
0,2 |
0,3 |
0,3 |
|
Получите начальные точки решения, охватывающие несколько периодов колебаний, и постройте по ним соответствующий участок зависимости x(t).
57
Задание 3. Вертикальные колебания механической системы (см. задание 1) под действием вынуждающей силы описывается уравнением вида
m d2 x +βdx +kx = F(t) , dt2 dt
где x – отклонение системы от исходного положения, t – время, m – масса блока, β – коэффициент трения, k – коэффициент жесткости амортизаторов.
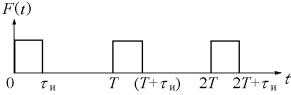
Внешнее воздействие представляет собой периодическую последовательность ударных импульсов F(t)
F |
при |
nT ≤ t < nT +τ |
|
, |
|
F (t) = |
m |
при |
|
и |
|
0 |
|
nT +τи ≤ t < (n +1)T , |
|||
где n = 0, 1, 2, 3, 4… .
Решите уравнение для следующих данных: масса m = 1 кг; коэффициент трения β = 0,5 кг/с, коэффициент жесткости k = 5 Н/м. Начальные условия x = 0 и dx/dt = 0 при t = 0. Остальные параметры даны в таблице.
Параметр |
|
|
В а р и а н т |
|
|
||
3-1 |
3-2 |
3-3 |
3-4 |
3-5 |
3-6 |
||
|
|||||||
τ и, с |
0,5 |
1 |
0,1 |
0,3 |
0,2 |
1,2 |
|
T, с |
1,5 |
2 |
1 |
1,5 |
2,5 |
1,7 |
|
Fm , Н |
3000 |
2500 |
2000 |
3000 |
2500 |
2000 |
|
Получите начальные точки решения, охватывающие не менее трех периодов колебаний. Постройте зависимости F(t) и x(t).
Задание 4. Вертикальные колебания механической системы (см. задание 1) под действием последовательности полусинусоидальных импульсов описывается дифференциальным уравнением вида
m d2 x +βdx +kx = |
|
F cos(ωt) |
|
, |
|
|
|
||||
dt2 |
dt |
|
m |
|
|
|
|
|
|
||
где x – отклонение системы от исходного положения, t – время, m – масса блока, β – коэффициент трения, k – коэффициент жесткости амортизаторов, Fm и ω – параметры вынуждающей силы.
Решите уравнение для следующих данных: масса m = 3 кг; коэффициент трения β = 1 кг/с, коэффициент жесткости k = 4 Н/м. Начальные условия x = 0 и dx/dt = 0 при t = 0. Остальные параметры даны в таблице.
Параметр |
|
|
В а р и а н т |
|
|
||
4-1 |
4-2 |
4-3 |
4-4 |
4-5 |
4-6 |
||
|
|||||||
m, кг |
2 |
3 |
1,5 |
14 |
2,5 |
3 |
|
Fm, Н |
150 |
1960 |
980 |
720 |
250 |
170 |
|
ω, рад/с |
0,1 |
2 |
2 |
0,2 |
12,5 |
0,3 |
|
Получите участок решения x(t), на котором устанавливаются устойчивые колебания в системе. Постройте зависимости F(t) = |Fmcos(ωt)| и x(t).

58
Задание 5. Прогиб однородной балки под собственным весом при консольном закреплении описывается дифференциальным уравнением
y′′ = − |
PL2 |
1 |
− |
x |
|
1+ (y′) |
2 |
|
32 |
, |
|
|
|
|
|
|
|
|
|||||
EJ |
|
2 |
|
|
|||||||
|
L |
|
L |
|
|
|
|
|
|
||
где L – длина балки, P – удельный вес бал-
ки (на единицу длины), EJ – жесткость балки, x – координата (0 < x < 1).
Задавшись начальными условиями y = 0 и y′ = 0 при x = 0, получите точки решения y(x) на всей длине балки для указанных параметров.
Параметр |
|
|
В а р и а н т |
|
|
||
5-1 |
5-2 |
5-3 |
5-4 |
5-5 |
5-6 |
||
|
|||||||
L, м |
1,5 |
1 |
0,9 |
2 |
2,5 |
1 |
|
PL2/EJ |
0,001 |
0,005 |
0,002 |
0,01 |
0,015 |
0,002 |
|
Задание 6. Количество особей в популяциях двух видов, взаимодействующих между собой по типу жертва – хищник, равно соответственно x и y. Изменение популяций во времени описывается системой дифференциальных уравнений (модель Лотки-Вольтерра)
dxdt = ax −bxy ,
dydt = −cy + dxy ,
где t – время, ax – скорость размножения жертв, bxy – скорость их истребления с учетом частоты встреч с хищниками, cy – скорость вымирания хищников, dxy – скорость размножения хищников в присутствии жертв.
Задавшись параметрами a, b, c, d и приняв начальные условия x0, y0 при t = 0, решите задачу. Получите участок решения, на котором наблюдаются повторяющиеся колебания численности популяций. Постройте соответствующие графики x(t), y(t) и y(x).
Параметр |
|
|
В а р и а н т |
|
|
||
6-1 |
6-2 |
6-3 |
6-4 |
6-5 |
6-6 |
||
|
|||||||
a |
0,15 |
0,2 |
3,2 |
0,2 |
0,15 |
0,1 |
|
b |
0,0001 |
0,001 |
2,1 |
0,001 |
0,02 |
0,01 |
|
c |
1 |
2,1 |
1,8 |
3,1 |
5 |
2,7 |
|
d |
0,005 |
0,01 |
1 |
0,01 |
0,001 |
0,002 |
|
x0 |
200 |
500 |
5 |
1000 |
10000 |
1000 |
|
y0 |
50 |
150 |
3 |
500 |
200 |
50 |
|

59
Задание 7. Развитие популяций хищников и их жертв описывается моделью Холлинга-Тэннера:
dx |
|
|
|
x |
b |
|
|
|
= a 1− |
|
|
x − |
|
xy , |
|
|
|
k2 + x |
|||||
dt |
|
|
k1 |
|
|||
|
|
|
|
y |
|
|
|
dy |
|
|
|
|
|||
|
= c |
− d |
|
|
y , |
|
|
|
|
|
|
||||
|
|
|
x |
|
|
||
dt |
|
|
|
|
|||
где x и y – относительная численность жертв и хищников соответственно, t – время, ax – скорость размножения жертв, ax/k1 – учитывает конкуренцию жертв из-за пищи, bxy/(k2+x) – скорость истребления жертв хищниками с
учетом |
насыщения |
последних, |
cy – |
скорость размножения |
хищников, |
|||||||||||
сdy2/x – учитывает вымирание хищников при недостатке пищи x. |
|
|||||||||||||||
Используя заданные в таблице параметры и начальные условия x0, y0 |
||||||||||||||||
получите участок решения, описывающий колебания x(t) и y(t). |
|
|||||||||||||||
Параметр |
|
|
|
|
|
|
|
|
|
|
В а р и а н т |
|
|
|||
|
7-1 |
|
|
7-2 |
|
7-3 |
|
7-4 |
7-5 |
7-6 |
||||||
|
|
|
|
|
|
|
||||||||||
x0 |
|
|
20 |
|
|
|
35 |
|
|
7 |
|
32 |
15 |
50 |
||
y0 |
|
|
5 |
|
|
|
7 |
|
|
3 |
|
17 |
2 |
5 |
||
a |
|
|
1,5 |
|
|
1,7 |
|
|
2,7 |
|
1,1 |
2,4 |
1,6 |
|||
b |
|
|
1,5 |
|
|
4,2 |
|
|
3,1 |
|
2,9 |
4,1 |
5,6 |
|||
c |
|
|
0,1 |
|
|
0,6 |
|
|
0,2 |
|
0,09 |
0,08 |
0,2 |
|||
d |
|
|
0,1 |
|
|
0,13 |
|
0,05 |
|
0,15 |
0,08 |
0,1 |
||||
k1 |
|
|
8 |
|
|
|
9,3 |
|
|
7,6 |
|
12 |
5,9 |
13,5 |
||
k2 |
|
|
1 |
|
|
|
2,1 |
|
|
2,5 |
|
1,5 |
2,1 |
1,8 |
||
Задание 8. Свободные колебания тока в последовательном электриче- |
||||||||||||||||
ском колебательном контуре описываются диффе- |
|
|
||||||||||||||
ренциальным уравнением |
|
|
|
|
|
|
|
|||||||||
|
|
L |
d 2i(t) |
+ R |
di(t) |
+ |
1 |
i(t)= 0 , |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
dt2 |
|
|
dt |
C |
|
|
|
|
|
|||
где i – ток, L – индуктивность катушки, R – сопротивление потерь контура, C – емкость конденсатора. Предполагается, индуктивность катушки зависти от протекающего через нее тока: L =L0 (1 – k i 2), где k – коэффициент.
Рассчитайте и постройте график зависимости i(t), охватывающий не менее пяти периодов колебаний, для начальных условий di/dt = 0 и i = 10 мА при t = 0. Остальные параметры указаны в таблице.
Параметр |
|
|
В а р и а н т |
|
|
||
8-1 |
8-2 |
8-3 |
8-4 |
8-5 |
8-6 |
||
|
|||||||
R, Ом |
1 |
0,5 |
1 |
2 |
1,5 |
2 |
|
C, мкФ |
0,001 |
0,01 |
0,1 |
0,047 |
0,0068 |
0,068 |
|
L0, мкГн |
1 |
5 |
10 |
50 |
50 |
10 |
|
k, 1/A2 |
5·103 |
9·103 |
103 |
5·103 |
4·102 |
103 |
|

60
Задание 9. Вынужденные колебания тока в электрическом колебательном контуре (см. рисунок) описываются дифференциальным уравнением
L d 2i |
+ R di |
+ |
1 |
i =U |
|
ωcos(ωt ), |
|
m |
|||||
dt2 |
dt |
|
C |
|
||
где i – ток, L – индуктивность катушки, R – сопротивление потерь, C – емкость конденсатора, Um – амплитуда напряжения генератора,
ω = 2π f – угловая частота. Сопротивление нелинейного резистора зависит от протекающего через него тока: R = R0 (1 + k i 2), где k – коэффициент.
Рассчитайте и постройте графики зависимостей u(t) = Umsin(ωt) и i(t), охватывающие несколько периодов колебаний, для Um = 1 В и начальных условий di/dt = 0 и i = 0 при t = 0. Остальные данные приведены в таблице.
Параметр |
|
|
В а р и а н т |
|
|
||
9-1 |
9-2 |
9-3 |
9-4 |
9-5 |
9-6 |
||
|
|||||||
R0, Ом |
2 |
3 |
5 |
3 |
7,5 |
1 |
|
L, мкГн |
1 |
5 |
10 |
50 |
2 |
10 |
|
C, мкФ |
0,001 |
0,01 |
0,1 |
0,047 |
0,0047 |
0,068 |
|
f, Гц |
106 |
5·106 |
105 |
2·105 |
2·106 |
6·104 |
|
k, 1/A2 |
8·1010 |
2·1014 |
1014 |
5·1010 |
4·1015 |
7·1012 |
|
Задание 10. На выходе однополупериодного диодного выпрямителя для ослабления пульсаций напряжения параллельно нагрузке включен конденсатор. Зависимость напряжения u на выходе выпрямителя от времени t описы-
вается дифференциальным уравнением
du |
= |
1 |
|
Um cos(ωt )−u |
− |
u |
|
, |
|
|
|
||||||||
dt |
|
R + R |
R |
||||||
|
C |
|
|
|
|||||
|
|
|
|
0 Д |
|
H |
|
||
где C – емкость конденсатора, Rн – сопротив-
ление нагрузки, R0 – выходное сопротивление источника переменного напряжения (трансформатора), RД – сопротивление диода,
Um – амплитуда переменного напряжения, ω = 2π f – угловая частота. Рассчитайте и постройте графики зависимостей u0(t) = Umcos(ωt) и u(t)
при Um = 12 В, f = 50 Гц для приведенных в таблице параметров. Начальное условие u(t=0) = 0. В расчете используйте аппроксимацию
|
|
|
|
5 |
|
|
|
|
R0 |
10 , еслиu > Um cos(ωt), |
|
|
|||
|
+ RД = |
|
|
|
|
||
|
|
|
5, еслиu ≤Um cos(ωt). |
|
|
||
|
|
|
|
|
|
|
|
Параметр |
|
|
|
В а р и а н т |
|
|
|
10-1 |
|
10-2 |
10-3 |
10-4 |
10-5 |
10-6 |
|
|
|
||||||
RН, Ом |
200 |
|
310 |
170 |
100 |
75 |
180 |
C, мкФ |
2000 |
|
500 |
200 |
470 |
5000 |
680 |