

Общие указания
Каждый студент выполняет индивидуальное задание на курсовую работу.
Цель курсовой работы – овладеть методикой анализа, выбора и расчета основных параметров типовой радиотехнической следящей системы.
Для всех вариантов задания на курсовую работу предлагается общая структурная схема линейной непрерывной следящей системы: рис. 1а и рис. 1б для систем 1-го и 2-го порядка астатизма соответственно. Общей для всех вариантов является также полиномиальная модель задающего воздействия:
 ,
,
где
 – начальное значение задающего
воздействия;
– начальное значение задающего
воздействия;
 –начальная
скорость изменения задающего воздействия;
–начальная
скорость изменения задающего воздействия;
 – начальное ускорение.
– начальное ускорение.
Физический смысл, а, следовательно, и размерность параметров задающего воздействия определяются типом следящей системы (соответственно для ССЗ, ФАПЧ, АПЧ и ССН параметр x0 имеет размерность мкс, рад, Гц и град).
Помеха n(t) полагается белым шумом со спектральной плотностью N0 Вт/Гц.
Специфика
варианта (табл. 1, табл. 2) определяется
назначением следящей системы, порядком
астатизма системы, численными значениями
параметров x0,
 и
и задающего
воздействия, спектральной плотностиN0
помехи
и коэффициента передачи kд
дискриминатора, а также структурой и
параметрами динамического звена с
передаточной функцией
задающего
воздействия, спектральной плотностиN0
помехи
и коэффициента передачи kд
дискриминатора, а также структурой и
параметрами динамического звена с
передаточной функцией
 ,
,
где k – общий коэффициент передачи типовых звеньев (одного или двух в зависимости от номера варианта); T1, T2, T3 – постоянные времени форсирующего и инерционных звеньев (индексы 1 и 2,3 соответственно).
Как
видно из табл. 1, проектируемые системы
имеют астатизм 1-го или 2-го порядка.
Поскольку рассматриваемые следящие
системы являются астатическими
(статическая ошибка отсутствует),
приведенное в таблице значение параметра
x0используется
лишь при моделировании следящей системы
(пункт 5 задания), а при выполнении других
пунктов оно не используется. Для систем
2-го порядка астатизма приведенное в
таблице значение параметра
 также
используется только при выполнении
пункта 5. При выполнении других пунктов
оно не используется, поскольку помимо
статической ошибки в таких системах
отсутствует и скоростная ошибка.
также
используется только при выполнении
пункта 5. При выполнении других пунктов
оно не используется, поскольку помимо
статической ошибки в таких системах
отсутствует и скоростная ошибка.
Значения исходных данных определяют по номеру варианта, который находят как остаток от деления на 50 числа, определяемого двумя последними цифрами шифра зачетной книжки. Например, шифр зачетной книжки – 539801. Результат деления числа 1 на 50 содержит целую часть – ноль и остаток, равный 1. Следовательно, номер варианта равен 1.
Пояснительная записка оформляется в соответствии с требованиями СТП. Конечные результаты расчетов приводят с указанием единиц измерения, используя стандартные сокращения. Например, герц – Гц, килогерц – кГц, децибел – дБ и пр. Графический материал (функциональная схема) выполняется на листе формата А1.
В конце пояснительной записки необходимо привести список литературы, которую использовал студент при выполнении курсовой работы.
Задание на курсовую работу
Для заданной структурной схемы следящей системы (рис. 1а или рис. 1б) и моделей задающего воздействия x(t) и помехи n(t) выполнить:
1. Определить передаточные функции разомкнутой системы Kр(p) и замкнутой системы Kз(p), а также спектральную плотность Nэ эквивалентных флуктуаций, приведенных к входу дискриминатора.
2. Произвести оптимизацию следящей системы по параметру k используя критерий минимума среднего квадрата ошибки. Определить оптимальное значение шумовой полосы Fш системы и минимально достижимую ошибку слежения emin. Построить графики зависимостей результирующей средней квадратической ошибки слежения, а также ее составляющих (динамической и шумовой ошибок) от полосы Fш.
3.Построить логарифмические амплитудно-частотную (ЛАХ) и фазо-частотную (ЛФХ) характеристики разомкнутой системы и определить по ним запас устойчивости по амплитуде и фазе при оптимальном значении параметра k.
4.
Определить АЧХ замкнутой системы Kз( ),
построить график функцииKз(
),
построить график функцииKз( )
при оптимальном значении параметраk.
По АЧХ замкнутой системы определить
частоту среза и параметры переходного
процесса: быстродействие и перерегулирование.
)
при оптимальном значении параметраk.
По АЧХ замкнутой системы определить
частоту среза и параметры переходного
процесса: быстродействие и перерегулирование.
5. Произвести моделирование следящей системы на ЭВМ при типовых воздействиях: а) ступенчатом; б) линейном (система с астатизмом 1-го порядка); линейном и квадратичном (система 2-го порядка). Построить графики переходного процесса y(t) при постоянном ступенчатом воздействии и определить качественные показатели системы в переходном режиме (быстродействие, перерегулирование). Построить графики переходного процесса для ошибки e(t) при типовых воздействиях: ступенчатом и линейном (система 1-го порядка); ступенчатом, линейном и квадратичном (система 2-го порядка).
6. Составить функциональную схему следящей системы заданного типа (схема должна содержать функциональные элементы устройства поиска и обнаружения сигнала).
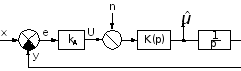
a
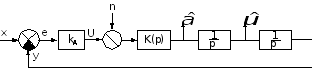
б
Рис. 1 – Структурная схема следящей системы: а – система 1-го порядка астатизма;
б – система 2-го порядка астатизма
Таблица 1– Варианты задания на курсовую работу
|
Номер варианта |
Тип следящей системы |
Порядок астатизма, r |
Параметры задающего воздействия |
Коэффициент передачи дискриминатора |
Спектральная плотность шума |
Параметры динамического звена | ||||
|
|
|
|
|
|
T1, c |
T2, c |
T3, c | |||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
0 |
ССЗ |
1 |
0,8 |
0,5 |
0 |
0,2 |
0,02 |
0 |
0,05 |
0 |
|
1 |
ССЗ |
2 |
1 |
0,3 |
0,15 |
0,5 |
0,01 |
2,5 |
0 |
0 |
|
2 |
ССЗ |
1 |
3 |
0,8 |
0 |
1 |
0,005 |
0,02 |
0,1 |
0 |
|
3 |
ССЗ |
2 |
1 |
0,5 |
0,1 |
0,25 |
8·10-4 |
3,0 |
0 |
0 |
|
4 |
ССЗ |
1 |
0,5 |
1,5 |
0 |
0,3 |
0,04 |
0 |
0,04 |
0,001 |
|
5 |
ССЗ |
1 |
4 |
4,2 |
0 |
1,2 |
0,03 |
0,002 |
0,015 |
0 |
|
6 |
ССЗ |
1 |
0,5 |
0,25 |
0 |
0,75 |
0,004 |
0 |
0,24 |
0 |
|
7 |
ФАПЧ |
1 |
2 |
0,3 |
0 |
0,08 |
4·10-5 |
0 |
0.,15 |
0 |
|
8 |
ФАПЧ |
2 |
0,8 |
0,6 |
0,75 |
0,25 |
0,003 |
0,7 |
0 |
0 |
|
9 |
ФАПЧ |
1 |
1 |
2,75 |
0 |
0,02 |
6·10-6 |
0,005 |
0,02 |
0 |
|
10 |
ФАПЧ |
2 |
2 |
0,4 |
0,6 |
0,014 |
5·10-6 |
1,0 |
0 |
0 |
|
11 |
ФАПЧ |
1 |
3 |
1,5 |
0 |
0,005 |
4·10-7 |
0 |
0,02 |
0,01 |
|
Окончание табл. 1 | ||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
12 |
ФАПЧ |
1 |
3 |
0,45 |
0 |
0,05 |
8·10-7 |
0,07 |
0,2 |
0 |
|
13 |
АПЧ |
1 |
100 |
150 |
0 |
0,09 |
5·10-6 |
0 |
0,001 |
0 |
|
14 |
АПЧ |
2 |
120 |
90 |
25 |
0,1 |
2·10-4 |
0,2 |
0 |
0 |
|
15 |
АПЧ |
1 |
200 |
75 |
0 |
1,3 |
0,08 |
0,001 |
0,003 |
0 |
|
16 |
АПЧ |
2 |
100 |
60 |
5 |
0,018 |
0,003 |
0,3 |
0 |
0 |
|
17 |
АПЧ |
1 |
50 |
25 |
0 |
0,16 |
4·10-4 |
0 |
0,01 |
0,008 |
|
18 |
АПЧ |
1 |
80 |
50 |
0 |
1,1 |
2·10-4 |
0,002 |
0,005 |
0 |
|
19 |
ССН |
1 |
10 |
4,5 |
0 |
0,25 |
1,8 |
0 |
0,2 |
0 |
|
20 |
ССН |
2 |
10 |
4 |
0,25 |
0,6 |
0,5 |
3,0 |
0 |
0 |
|
21 |
ССН |
1 |
5 |
0,5 |
0 |
0,075 |
0,012 |
0,5 |
1,5 |
0 |
|
22 |
ССН |
2 |
20 |
8 |
1,25 |
0,9 |
0,05 |
1,5 |
0 |
0 |
|
23 |
ССН |
1 |
15 |
0,15 |
0 |
0,7 |
0,15 |
0 |
6,0 |
0,8 |
|
24 |
ССН |
1 |
30 |
2,2 |
0 |
1,5 |
0,02 |
0,06 |
0,4 |
0 |
|
25 |
ССЗ |
1 |
2,5 |
0,5 |
0 |
0,4 |
0,02 |
0 |
0,05 |
0 |
|
26 |
ССЗ |
2 |
1,5 |
1 |
0,15 |
1,0 |
0,01 |
2,5 |
0 |
0 |
|
27 |
ССЗ |
1 |
4 |
0,8 |
0 |
2,0 |
0,005 |
0,02 |
0,1 |
0 |
|
28 |
ССЗ |
2 |
1 |
1,5 |
0,1 |
0,5 |
8·10-4 |
3,0 |
0 |
0 |
|
29 |
ССЗ |
1 |
2 |
1,5 |
0 |
0,6 |
0,04 |
0 |
0,04 |
0,001 |
|
30 |
ССЗ |
1 |
10 |
4,2 |
0 |
2,4 |
0,03 |
0,002 |
0,015 |
0 |
|
31 |
ССЗ |
1 |
5 |
0,25 |
0 |
1,5 |
0,004 |
0 |
0,24 |
0 |
|
32 |
ФАПЧ |
1 |
0,1 |
0,3 |
0 |
0,16 |
4·10-5 |
0 |
0.,15 |
0 |
|
33 |
ФАПЧ |
2 |
0,8 |
0,4 |
0,75 |
0,5 |
0,003 |
0,7 |
0 |
0 |
|
34 |
ФАПЧ |
1 |
1 |
2,75 |
0 |
0,02 |
6·10-6 |
0,005 |
0,02 |
0 |
|
35 |
ФАПЧ |
2 |
0,5 |
0,25 |
0,6 |
0,028 |
5·10-6 |
1,0 |
0 |
0 |
|
36 |
ФАПЧ |
1 |
2 |
1,2 |
0 |
0,01 |
4·10-7 |
0 |
0,02 |
0,01 |
|
37 |
ФАПЧ |
1 |
3 |
0,45 |
0 |
0,1 |
8·10-7 |
0,07 |
0,2 |
0 |
|
38 |
АПЧ |
1 |
120 |
150 |
0 |
0,18 |
5·10-6 |
0 |
0,001 |
0 |
|
39 |
АПЧ |
2 |
80 |
50 |
25 |
0,2 |
2·10-4 |
0,2 |
0 |
0 |
|
40 |
АПЧ |
1 |
100 |
75 |
0 |
2,6 |
0,08 |
0,001 |
0,003 |
0 |
|
41 |
АПЧ |
2 |
40 |
30 |
5 |
0,036 |
0,003 |
0,3 |
0 |
0 |
|
42 |
АПЧ |
1 |
80 |
25 |
0 |
0,32 |
4·10-4 |
0 |
0,01 |
0,008 |
|
43 |
АПЧ |
1 |
100 |
50 |
0 |
2,2 |
2·10-4 |
0,002 |
0,005 |
0 |
|
44 |
ССН |
1 |
20 |
4,5 |
0 |
0,5 |
1,8 |
0 |
0,2 |
0 |
|
45 |
ССН |
2 |
15 |
1,2 |
0,25 |
1,2 |
0,5 |
3,0 |
0 |
0 |
|
46 |
ССН |
1 |
8 |
0,5 |
0 |
0,15 |
0,012 |
0,5 |
1,5 |
0 |
|
47 |
ССН |
2 |
15 |
2 |
1,25 |
1,8 |
0,05 |
1,5 |
0 |
0 |
|
48 |
ССН |
1 |
10 |
0,15 |
0 |
1,4 |
0,15 |
0 |
6,0 |
0,8 |
|
49 |
ССН |
1 |
30 |
2,2 |
0 |
3,0 |
0,02 |
0,06 |
0,4 |
0 |





Таблица 2 – Область применения автоматической системы
|
Номер варианта |
Область применения |
|
0 |
Система синхронизации модема цифровой РТС ПИ |
|
1 |
Следящий измеритель дальности некогерентной импульсной РЛС (простой сигнал) |
|
2 |
Цифровой следящий измеритель дальности некогерентной импульсной РЛС (простой сигнал) |
|
3 |
Следящий измеритель дальности наземной широкополосной РНС (сложный МЧМ сигнал) |
|
4 |
Следящий измеритель дальности некогерентной импульсной РЛС (сложный ФМ сигнал) |
|
5 |
Цифровой следящий измеритель дальности некогерентной импульсной РЛС (сложный ФМ сигнал) |
|
6 |
Цифровой следящий измеритель дальности некогерентной импульсной РЛС (сложный ЛЧМ сигнал) |
|
7 |
Доплеровский измеритель скорости и угла сноса с непрерывным излучением |
|
8 |
Следящей измеритель скорости НАП спутниковой РНС (сложный ФМ сигнал) |
|
9 |
Демодулятор ОФМ сигнала |
|
10 |
Следящий измеритель дальности наземной широкополосной РНС (сложный МЧМ сигнал) |
|
11 |
Демодулятор ЧМ сигнала |
|
12 |
Цифровая система фазовой синхронизации демодулятора НАП спутниковой РНС |
|
13 |
Система стабилизации промежуточной частоты телевизионного приемника. |
|
14 |
Следящий измеритель скорости НАП спутниковой РНС |
|
15 |
Следящий фильтр доплеровского измерителя скорости |
|
16 |
Следящей измеритель дальности частотной РЛС с непрерывным излучением |
|
17 |
Демодулятор ЧМ сигнала |
|
18 |
Цифровой следящий измеритель дальности частотной РЛС с непрерывным излучением |
|
19 |
Автоматический радиокомпас, работающий по методу последовательного сравнения сигналов |
|
20 |
Фазовый пеленгатор РТС траекторных измерений |
|
21 |
Следящий измеритель азимута импульсной РЛС автосопровождения по направлению |
|
22 |
Цифровой следящий измеритель угловых координат моноимпульсной суммарно-разностной РЛС |
|
23 |
Цифровой следящий измеритель угловых координат импульсной РЛС с коническим сканированием |
|
24 |
РЛС автосопровождения по направлению с использованием ФАР |
|
Окончание табл. 1 | |
|
Номер варианта |
Область применения |
|
26 |
Следящий измеритель дальности некогерентной импульсной РЛС (простой сигнал) |
|
27 |
Цифровой следящий измеритель дальности некогерентной импульсной РЛС (простой сигнал) |
|
28 |
Следящий измеритель дальности НАП спутниковой РНС (сложный ФМ сигнал) |
|
29 |
Следящий измеритель дальности некогерентной импульсной РЛС (сложный ФМ сигнал) |
|
30 |
Цифровой следящий измеритель дальности некогерентной импульсной РЛС (сложный ФМ сигнал) |
|
31 |
Цифровой следящий измеритель дальности некогерентной импульсной РЛС (сложный ЛЧМ сигнал) |
|
32 |
Доплеровский измеритель скорости и угла сноса с непрерывным излучением |
|
33 |
Следящей измеритель скорости НАП спутниковой РНС (сложный ФМ сигнал) |
|
34 |
Демодулятор ОФМ сигнала |
|
35 |
Следящий измеритель скорости НАП спутниковой РНС (сложный ФМ сигнал) |
|
36 |
Демодулятор ЧМ сигнала |
|
37 |
Цифровая система фазовой синхронизации демодулятора НАП спутниковой РНС |
|
38 |
Система стабилизации промежуточной частоты телевизионного приемника. |
|
39 |
Следящий измеритель скорости НАП спутниковой РНС |
|
40 |
Следящий фильтр доплеровского измерителя скорости |
|
41 |
Следящей измеритель дальности частотной РЛС с непрерывным излучением |
|
42 |
Демодулятор ЧМ сигнала |
|
43 |
Цифровой следящий измеритель дальности частотной РЛС с непрерывным излучением |
|
44 |
Автоматический радиокомпас, работающий по методу последовательного сравнения сигналов |
|
45 |
Фазовый пеленгатор РТС траекторных измерений |
|
46 |
Следящий измеритель азимута импульсной РЛС автосопровождения по направлению |
|
47 |
Цифровой следящий измеритель угловых координат моноимпульсной суммарно-разностной РЛС |
|
48 |
Цифровой следящий измеритель угловых координат импульсной РЛС с коническим сканированием |
|
49 |
РЛС автосопровождения по направлению с использованием ФАР |