

Методические указания к выполнению курсовой работы
В первом разделе курсовой работы находят передаточные функции разомкнутой и замкнутой системы [1, с. 29-44; 8, с. 12–18], а также спектральную плотность эквивалентных флуктуаций, приведенных к входу дискриминатора.
Используя правила преобразования структурных схем (перенос сумматора с выхода на вход безынерционного звена[1, с. 34–37]), для спектральной плотности эквивалентного шума nэ(t), приведенного к входу дискриминатора (вход элемента сравнения на схеме рис. 1), можно записать
 .
.
Размерность спектральной плотности Nэ эквивалентного шума определяется как
 ,
,
где
[N0]
– Вт/Гц,
 , [x]
– размерность параметрах.
При записи последнего выражения учтено,
что 1Вт=1В2.
, [x]
– размерность параметрах.
При записи последнего выражения учтено,
что 1Вт=1В2.
Во втором разделе курсовой работы решают задачу оптимизации следящей системы (по одному параметру), а также находят оптимальное значение шумовой полосы и минимально достижимую ошибку слежения, используя [1, с. 67–83; 2, с. 91–116; 3, с. 88—92; 4, с. 84–98].
Оптимизация системы по критерию минимума среднего квадрата ошибки сводится к нахождению значения параметра k, при котором обеспечивается минимум величины
 , (1)
, (1)
при
заданной структуре системы (вид
передаточной функции Kp(p)).
По формуле (1) вычисляют средний
квадрат ошибки
слежения
 в установившемся режиме (
в установившемся режиме ( -оценка
задающего воздействия). Составляющаяeд
определяет динамическую ошибку,
обусловленную инерционностью следящей
системы по отношению к меняющемуся
задающему воздействию (при детерминированном
воздействии ошибка также детерминированная).
Составляющая
-оценка
задающего воздействия). Составляющаяeд
определяет динамическую ошибку,
обусловленную инерционностью следящей
системы по отношению к меняющемуся
задающему воздействию (при детерминированном
воздействии ошибка также детерминированная).
Составляющая
 определяет дисперсию ошибкиen(t),
обусловленной помехой n(t).
определяет дисперсию ошибкиen(t),
обусловленной помехой n(t).
Таким
образом, формула (1) определяет средний
квадрат результирующей ошибки
 .
Черта сверху над величинойe2в
(1) означает статистическое усреднение
по множеству реализаций шумовой ошибки
en(t).
.
Черта сверху над величинойe2в
(1) означает статистическое усреднение
по множеству реализаций шумовой ошибки
en(t).
Динамическая
ошибка eд
определяется параметрами
 и
и задающего воздействия, а также порядком
астатизма (числом интеграторов) и
добротностьюK=kдk
системы. Для систем 1-го и 2-го порядка
астатизма установившаяся динамическая
ошибка соответственно равна
задающего воздействия, а также порядком
астатизма (числом интеграторов) и
добротностьюK=kдk
системы. Для систем 1-го и 2-го порядка
астатизма установившаяся динамическая
ошибка соответственно равна
 , (2)
, (2)
где K1, c-1 – добротность системы по скорости (система 1-го порядка астатизма); K2, c-2 – добротность системы по ускорению (система 2-го порядка астатизма).
Случайная составляющая en(t) ошибки определяется статистическими характеристиками помехи n(t), структурой и параметрами системы. В большинстве практических приложений в качестве помехи n(t) используют модель белого шума с равномерной в полосе частот от 0 до ∞ спектральной плотностью. Хотя реальный шум имеет ограниченную ширину спектра, однако она во много раз превышает полосу Fш пропускания системы, что позволяет использовать модель белого шума. В этом случае дисперсию шумовой ошибки рассчитывают по формуле
 , (3)
, (3)
 , (4)
, (4)
где –
шумовая полоса следящей системы в Гц;
–
шумовая полоса следящей системы в Гц; – АЧХ замкнутой системы.
– АЧХ замкнутой системы.
Для нахождения экстремума среднего квадрата ошибки необходимо продифференцировать выражение (1) по параметру k и приравнять производную нулю:
 (5)
(5)
Решение этого уравнения с использованием формул (2) – (4) дает оптимальное значение коэффициента передачи динамического звена (а, следовательно, и общего усиления разомкнутой системы). Подстановка значения kopt в выражения (1), (4) позволяет определить оптимальное значение шумовой полосы Fшopt системы и минимально достижимую ошибку слежения emin. Пример решения задачи оптимизации динамического звена приводится в Приложении 3.
Физический
смысл существования оптимального
значения полосы Fш
объясняется следующим. При малых
значениях Fш
основной вклад в результирующую ошибку
 вносит составляющаяeд,
а при больших Fш
– шумовая составляющая en
(рис. 2).
вносит составляющаяeд,
а при больших Fш
– шумовая составляющая en
(рис. 2).
В случае затруднений при решении уравнения (5) для нахождения kopt следует использовать графический метод, т.е. построить указанные зависимости ошибки слежения и ее составляющих как функции параметра k и определить kopt, при котором результирующая ошибка минимальна (графики зависимости ошибок от полосы Fш приводятся на другом рисунке). Пример программы оптимизации в среде Mathcad приведен в Приложении 5.
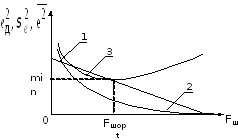
Рис.
2 – График зависимости ошибок слежения
от шумовой полосы системы:
1
– eд2(Fш);
2 – σe2(Fш);
3 –

В третьем разделе курсовой работы определяют запас устойчивости системы, используя логарифмические частотные характеристики: асимптотическую ЛАХ и ЛФХ разомкнутой следящей системы [1, с. 44–55; 2, с. 81–91; 3, с. 74—84; 4, с. 72-77; 8, с. 18–24].
Запас по фазе определяется как
 ,
,
где
 – значение ЛФХ на частоте среза
– значение ЛФХ на частоте среза (частота, на которой значение ЛАХL(
(частота, на которой значение ЛАХL( )
равно 0 дБ).
)
равно 0 дБ).
Запас
по усилению
численно равен значению ЛАХ на критической
частоте
 (частота,
на которой ЛФХ равна –
(частота,
на которой ЛФХ равна – рад.). Считается, что запас устойчивости
достаточный, если
рад.). Считается, что запас устойчивости
достаточный, если рад и
рад и 6
дБ.
6
дБ.
Если в результате анализа устойчивости окажется, что запас недостаточный, то необходимо изменить значение k, обеспечив требуемый запас устойчивости. После этого необходимо пересчитать значения шумовой полосы и результирующей ошибки слежения, полученные в предыдущем пункте.
Для выполнения четвертого раздела курсовой работы следует использовать [1, с. 29–43; 8, с. 12–18].
По передаточной функции замкнутой системы определяют АФХ

АЧХ замкнутой системы находят как
 .
(6)
.
(6)
Используя
формулу (6), строят график АЧХ замкнутой
системы при оптимальном значении
коэффициента передачи k.
По графику АЧХ находят частоту
среза (частота,
для которой )
ипараметр
колебательности
)
ипараметр
колебательности

Параметры переходного процесса: перерегулирование и быстродействие – находят, используя значения параметров ср и M:
 ,
,


(для монотонной АЧХ =0).
Для выполнения пятого раздела рекомендуется литература [1, с. 56–66; 2, с.91–104; 3, с. 225–228; 4, с. 170–175, 299–305; 8, с. 25–32]. При моделировании линейной непрерывной системы по ее передаточной функции используют цифровую модель, получаемую заменой непрерывных интегрирующих звеньев дискретными интеграторами.
Передаточная функция цифровой модели следящей системы при использовании интегрирования по методу прямоугольников получается из передаточной функции непрерывной системы путем замены оператора непрерывного интегрирования:
 (7)
(7)
где
T
–
интервал дискретизации, выбираемый из
условия
 .
.
Полученную в результате дискретной аппроксимации (7) передаточную функцию цифровой модели динамического звена необходимо представить в виде дробно-рациональной функции
 (8)
(8)
где
 –
оператор временного запаздывания наТ;
–
оператор временного запаздывания наТ;
 – безразмерные коэффициенты, определяемые
параметрами звена (коэффициент передачи,
постоянные времени), а также дискретомТ:
– безразмерные коэффициенты, определяемые
параметрами звена (коэффициент передачи,
постоянные времени), а также дискретомТ:
 (9)
(9)
Используя передаточные функции цифровых моделей интегратора (7) и динамического звена (8) с учетом безынерционной части системы (рис.1), запишем систему уравнений для цифровой модели непрерывной системы 1-го и 2-го порядков астатизма (i=1, 2,…):
r=1 r=2

 (10)
(10)
В уравнениях (10) учтено, что дискретные значения переменных при отрицательных значениях i равны нулю.
Третья строка в алгоритмах (10) определяет разностное уравнение, описывающее цифровую модель динамического звена:
 (11)
(11)
Формула
(11) записана для случая
r
=
1. При
r
=
2 переменная
 заменяется
на
заменяется
на
 .
Для моделирования необходимо представить
разностное уравнение (11) в рекуррентной
форме. В зависимости от номера варианта
(значений параметров
.
Для моделирования необходимо представить
разностное уравнение (11) в рекуррентной
форме. В зависимости от номера варианта
(значений параметров )
следует использовать одно из рекуррентных
уравнений:
)
следует использовать одно из рекуррентных
уравнений:
1)

 ; (11а)
; (11а)
2)

 (11б)
(11б)
3)
 ,
,
 (11в)
(11в)
Уравнения
(11а
–
11в)
записаны для случая
r
=
1 . При
r
=
2 переменная
 заменяется на
заменяется на .
.
Пример построения цифровой модели следящей системы рассматривается в Приложении 4.
Качественные показатели переходного процесса (быстродействие, перерегулирование) определяют по графику зависимости y[iT], где iT= T, 2T, … – дискретное время, кратное интервалу Т дискретизации) для ступенчатого воздействия
 , (12)
, (12)
При
этом быстродействие оценивается временем
переходного процесса tп
(время, в течение которого ошибка
уменьшается по абсолютной величине до
значения 0,05), а перерегулирование –
величиной максимального выброса emin
в переходной характеристике (рис. 3): .
.
Формирование дискретных значений линейного или квадратичного воздействия производится соответственно по формулам
 (13)
(13)
или их рекуррентным аналогам (более удобным для реализации на ЭВМ)
 .
.
Здесь
 xт
– приращение параметра x
за интервал T,
равное соответственно
xт
– приращение параметра x
за интервал T,
равное соответственно
 и
и – при линейном и квадратичном воздействиях.
– при линейном и квадратичном воздействиях.

Рис. 3 – Переходной процесс в системе при постоянном ступенчатом воздействии: 1 – монотонный (перерегулирование отсутствует), 2 – апериодический, 3 – колебательный
В шестом разделе требуется составить функциональную схему автоматической системы с учетом указанной в табл. 2 области применения. Функциональные схемы типовых следящих систем и описание принципа их работы приводятся в [1, с. 83–133; 2, с. 9–33; 3, с. 13–19; 4, с. 10–22]. Примеры их использования в РТС различного назначения содержатся в [9, с. 178–209]. Помимо литературы, указанной для выполнения этого пункта задания, рекомендуется [10–12].
Независимо
от типа следящей системы для первоначального
ввода ее в режим слежения (а также при
потере сигнала из-за срыва слежения)
используется устройство поиска сигнала
(в режиме слежения оно используется для
контроля). Необходимое условие нормальной
работы следящей системы заключается в
том, чтобы начальное рассогласование
(ошибка) не превышало значения,
определяемого апертурой дискриминационной
характеристики (для систем АПЧ и ФАПЧ
полосой захвата). Назначение устройства
поиска – свести начальное рассогласование
до указанного значения, после чего
система переходит в режим слежения.
Процедура поиска сигнала состоит в
изменении параметра
 опорного сигнала с дискретом, не
превышающим значения, требуемого для
ввода системы в режим слежения, и принятии
решения о наличии сигнала (обнаружение)
для каждого значения параметра
опорного сигнала с дискретом, не
превышающим значения, требуемого для
ввода системы в режим слежения, и принятии
решения о наличии сигнала (обнаружение)
для каждого значения параметра (возможно также непрерывное изменение
(возможно также непрерывное изменение со скоростью, согласованной с параметрами
со скоростью, согласованной с параметрами ,
, задающего воздействия).
задающего воздействия).
Структурные схемы оптимальных обнаружителей для различных моделей сигналов представлены в [9, с. 29–65], а цифровых обнаружителей в [12, с. 129–155]. Вопросы организации процедуры поиска сигнала рассматриваются в [2, с. 271–288; 11, 12].
Библиографический список
1. Бондаренко, В.Н. Системы радиоавтоматики. Основы теории и принципы построения: Учебное пособие. Красноярск: ИПК СФУ, 2010.
2. Первачев, С.В. Радиоавтоматика. /С. В. Первачев, М.: Радио и связь, 1982 – с., 296.
3. Бесекерский, В.А. Радиоавтоматика /В. А. Бесекерский, А. А. Елисеев, А. В. Небылов и др.; Под ред. В. А. Бесекерского. М.: Высш. школа, 1985.
4. Коновалов, Г.Ф. Радиоавтоматика / Г. Ф. Коновалов, М.: Высш. школа, 1990.
5. Бесекерский, В.А. Теория систем автоматического управления / В. А. Бесекерский, Е. П. Попов. – СПб. : Профессия, 2003.
6. Ерофеев, А.А. Теория автоматического управления / А. А. Ерофеев. – СПб. : Политехника, 1998.
7. Шавров, А.В. Автоматика / А. В. Шавров, А.П. Коломиец. М. : Колос, 2000.
8. Бондаренко, В.Н. Радиоавтоматика. Методические указания по выполнению расчётно-графического задания. Красноярск: ИПЦ КГТУ, 2005.
9. Чердынцев, В. А. Радиотехнические системы. – Минск: Высш. школа, 1988. – 368 с.
10. Цифровые системы фазовой синхронизации / Под. Ред. М. И. Жодзишского. – М.: Сов. радио, 1980. – 208 с.
11. Казаринов, Ю. М. Радиотехнические системы / Ю. М. Казаринов, Ю. А. Коломенский, В. М. Кутузов и др. – М.: Академия, 2008. – 590 с.
12. Проектирование импульсных и цифровых устройств радиотехнических систем / Ю. П. Гришин, Ю. М. Казаринов, В. М. Катиков и др.; Под ред. Ю. М. Казаринова. –М.: Высш. школа, 1985. – 264 с.
13.Система менеджмента качества, общие требования к построению, изложению и оформлению документов учебной и научной деятельности СТО 4.2-07-2010