

Система ашл без датчика натяжения
Ф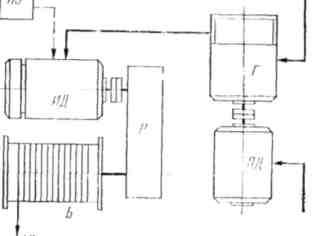 ункционально
система является наиболее простой (рис.
3.30). Здесь оценка усилия производится
самим электродвигателем. В автоматическом
режиме он стоит под током и уравновешивает
момент,создаваемый натяжением троса
па барабане. Наиболее часто в АШЛ такого
вида реализуется система Г- /I. где
создаются благоприятные крутоиадаюшие
механические характеристики.Системы
имеют достаточно высокие технико-экономические
показатели. Ручное управление при
швартовных операциях осуществляется
комапдоапнаратом ПУ, который, воздействуя
на возбуждение генератора Г и двигателя
ИД,создает необходимые тяговые
характеристики лебедки. При переходе
в режим автоматического управления
рукоятка -поста ставится в одно из
начальных положений в зависимости от
требуемого натяжения. Равновесное
состояние достигается самостоятельно.
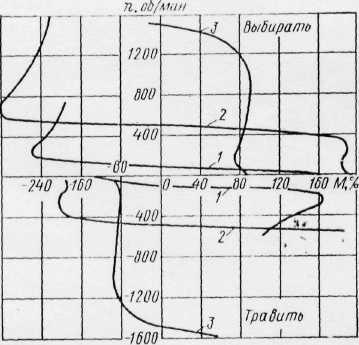
Если усилие мало, то ИД работает в
двигательном режиме, выбирая слабину
троса. С увеличением натяжения частота
вращения ИД согласно характеристике
надает и в конечном итоге он останавливается
пол током. Если начальное натяжение
велико, происходит стравливание каната
до тех пор, пока противодействующие
моменты не выровняются. Двигатель здесь
работает в режиме противовключения.
Для АШЛ этого типа характерно , что
частота вращения ИД является переменной
и определяется приведенным моментом
на двигателе
ункционально
система является наиболее простой (рис.
3.30). Здесь оценка усилия производится
самим электродвигателем. В автоматическом
режиме он стоит под током и уравновешивает
момент,создаваемый натяжением троса
па барабане. Наиболее часто в АШЛ такого
вида реализуется система Г- /I. где
создаются благоприятные крутоиадаюшие
механические характеристики.Системы
имеют достаточно высокие технико-экономические
показатели. Ручное управление при
швартовных операциях осуществляется
комапдоапнаратом ПУ, который, воздействуя
на возбуждение генератора Г и двигателя
ИД,создает необходимые тяговые
характеристики лебедки. При переходе
в режим автоматического управления
рукоятка -поста ставится в одно из
начальных положений в зависимости от
требуемого натяжения. Равновесное
состояние достигается самостоятельно.
Если усилие мало, то ИД работает в
двигательном режиме, выбирая слабину
троса. С увеличением натяжения частота
вращения ИД согласно характеристике
надает и в конечном итоге он останавливается
пол током. Если начальное натяжение
велико, происходит стравливание каната
до тех пор, пока противодействующие
моменты не выровняются. Двигатель здесь
работает в режиме противовключения.
Для АШЛ этого типа характерно , что
частота вращения ИД является переменной
и определяется приведенным моментом
на двигателе
1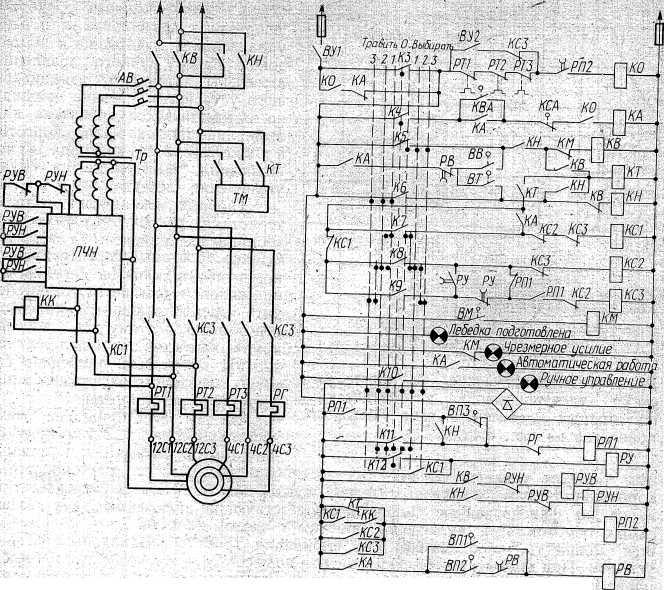 23Схема
электропривода переменною тока
автоматической швартовной лебедки с
использованием преобразователя частоты
тина ТТС
40 К.
23Схема
электропривода переменною тока
автоматической швартовной лебедки с
использованием преобразователя частоты
тина ТТС
40 К.
12CI — 12C3 —зажимы основной обмотки электродвигатели; 4CI—4С3—зажимы обмотки для операций с нагруженным тросом; ПЧН — статический преобразователь частоты с непосредственной связью; ТМ — тормозной электромагнит; Тр — силовой трансформатор питания преобразователя частоты; АВ автоматическим выключатель защиты преобразователя частоты; KB — контактор направления выбирания; КН — контактор направления травления; КТ — контактор тормозного электромагнита; КС1, КС2. КСЗ — контакторы малой, основной и большой скорости соответственно; КК — контактор контроля напряжения преобразователя; К0 —контактор нулевой защиты; КА —контактор режима автоматической работы; KBА —кнопка автоматической работы; КСА — кнопка отключения режима автоматической работы; КМ — контактор сигнала чрезмерного усилия: ВМ, ВВ. ВТ, ВП1, ВП2, ВП3 — контакты командоаппарата усилий, связанного со взвешивающим устройством лебедки; РУ — реле ускорения с выдержкой времени 0,5 с; РП1 — реле грузовой защиты; PП2 — реле контроля сборки схемы; РУВ, РУН — реле управления преобразователем: РВ — реле времени; ВУ1 — выключатель управления; ВУ2 - выключатель шунтировки тепловой защиты; PT1—РТ3— тепловые реле защиты; РГ — грузовое реле (срабатывает за время, на 40 %
меньшее, чем время срабатывания реле РТЗ); К3—К12 - контакты командоконтроллера.
Схемы электроприводов автоматических швартовных лебедок.
Поскольку автоматические швартовные лебедки применяются только на судах с сетями переменного тока, электроприводы к ним выполняются на основе использования многоскоростных короткозамкнутых электродвигателей переменного тока. Системы с исполнительными электродвигателями постоянного тока, получающими питание по системе Г—Д или через регулируемые выпрямители, в отечественной практике не применяются. При контакторном управлении электроприводами автоматических швартовных лебедок с трехскоростными короткозамкнутыми электродвигателями силовая схема полностью повторяет силовую часть швартовных механизмов, а в цепь управления в дополнение к командоконтроллеру ручного управления включены датчики от взвешивающего устройства, дающие команду на автоматическое травление или выбирание троса на малой скорости, а также устройства контроля и сигнализации, выведенные на пульт управления лебедкой.
Однако требуемый перспективными нормативами диапазон регулирования скорости (свыше 1:15) обеспечил электромашинным способом невозможно, поэтому для наиболее крупных лебедок с. тяговым усилием 125 кН могут быть применены системы смешанного электромашинно-частотного регулирования.
На рис. приведена схема электропривода автоматической швартовной лебедки с номинальным тяговым усилием 125 кН. Электропривод выполнен с двухскоростным короткозамкнутым электродвигателем мощностью 50 кВт. Электродвигатель имеет две фиксированные скорости, соответствующие включению двух независимых обмоток. При включении обмотки с.числом полюсов 2р = 12 реализуется мощность, необходимая для выбирания троса с номинальным тяговым усилием. При включении обмотки с числом полюсов 2/> — 4 обеспечивается выбирание и травление троса с малой нагрузкой. Включение обмоток высшей и номинальной скорости, а также реверсирование электродвигателя осуществляются с помощью магнитного контроллера, управляемого командоконтроллером. Обмотка с числом полюсов 2р = 12 помимо питания прямо от сети может получить питание от статического тиристорного преобразователя частоты с непосредственной связью. При этом максимальная частота на выходе преобразователя составляет 16 Гц, а минимальная — около 8 Гц. При управлении через командоконтроллер реализуются частота 10 Гц и соответственно скорость, составляющая около 40 % номинальной. После установки командоконтроллера в положение, соответствующее малой скорости, двигатель с помощью магнитного контроллера включается в заданное направление вращения, и его обмотка подключается к преобразователю. С помощью преобразователя достигается плавное нарастание частоты вращения при постоянном значении пускового тока, и электропривод обеспечивает операции швартования с малой скоростью ручного управления.
При автоматическом управлении заранее подготавливается схема включения обмотки электродвигателя через статический преобразователь частоты. Для включения электродвигателя достаточно от датчика тягового усилия через контакты ВТ или ВВ получить команду на выбирание или травление троса. По этой команде включаются реверсивные контакторы KB или КН, а преобразователь формирует частоту около 8 Гц, что соответствует скорости троса, составляющей около 20 % номинальной.
 Отключение
электропривода происходит при прекращении
импульса от датчика тягового усилия.
Если лебедка имеет регулятор с несколькими
значениями
уставок натяжения, то преобразователь
частоты формирует при заданной
частоте меняющиеся значения эффективного
напряжения, что позволяет
ограничивать пусковой момент при
выбирании троса.
Отключение
электропривода происходит при прекращении
импульса от датчика тягового усилия.
Если лебедка имеет регулятор с несколькими
значениями
уставок натяжения, то преобразователь
частоты формирует при заданной
частоте меняющиеся значения эффективного
напряжения, что позволяет
ограничивать пусковой момент при
выбирании троса.