

Превращение свободного гироскопа в гирокомпас.
Если главную ось свободного гироскопа установить в плоскости меридиана, то с течением времени вследствие вращения Земли ось будет уходить из этой плоскости, совершая относительно последней видимое движение.
Земля
в своем суточном движении вращается с
запада на восток вокруг оси NS с угловой
скоростью ω (рис. 3). Перенесем вектор
угловой скорости ω в точку М, лежащую
на земной поверхности под широтой φ, и
разложим его по правилу параллелограмма
на составляющие ω1
и ω2.
Составляющая ω1=cosω, лежащая в плоскости горизонта, называется горизонтальной составляющей земного вращения и определяет скорость вращения плоскости горизонта вокруг горизонтальной оси Мх (полуденной линии). Восточной частью плоскость горизонта опускается в пространстве, а западной частью поднимается.
Составляющая ω2=sinω, направленная по вертикали, называется вертикальной составляющей земного вращения. Вертикальная составляющая определяет вращение плоскости меридиана вокруг оси М (вертикали места).
На экваторе ω1=ω, а ω2=0, т. е. горизонтальная составляющая достигает максимального значения, а вертикальная составляющая обращается в нуль. На полюсе, наоборот, ω2=ω, а ω1=0, т. е. вертикальная составляющая имеет максимальное значение, а горизонтальная составляющая обращается в нуль. На промежуточных широтах имеет место одновременное вращение плоскости горизонта и плоскости меридиана. Для того, чтобы превратить свободный гироскоп в гирокомпас, необходимо сообщить ему направляющий момент, который, воздействуя на гироскоп, приводил бы его главную ось в плоскость меридиана.
Направляющий момент приобретается гироскопом благодаря ограничению одной из трех степеней свободы.
Наиболее
простым способом этого ограничения
является смещение центра тяжести
гироскопа ниже точки подвеса. Гирокомпас,
у которого центр тяжести смещен
относительно точки подвеса, называется
маятниковым гирокомпасом.
Гироскопическая система (гироскоп и его подвес) является основным элементом гирокомпаса; система реагирует на земное вращение и называется поэтому чувствительным элементом. Точкой подвеса гироскопической системы называют ее геометрический центр.
Рассмотрим принцип действия маятникового гирокомпаса, у которого чувствительный элемент имеет один гироскоп. На рис. 4 изображен вид на Землю со стороны северного полюса (плоскость земного экватора совпадает с плоскостью чертежа).
Допустим, что гироскоп находится на экваторе, и в начальный момент (положение I) главная ось гироскопа горизонтальна и направлена в плоскости восток—запад. Центр тяжести чувствительного элемента, вес которого mg, находится в точке G и смещен вниз от точки подвеса О на величину а, называемую метацентрической высотой.
Момент силы тяжести чувствительного элемента mg относительно точки подвеса О называется маятниковым моментом.
В начальном положении маятниковый момент равен нулю, так как направление силы тяжести проходит через точку подвеса.
С течением времени Земля повернется на некоторый угол Θ, и гироскоп окажется в новом положении (положение II). При этом главная ось гироскопа, стремясь сохранить первоначально заданное ей направление, отклонится от вращающейся в пространстве плоскости горизонта OW на тот же угол Θ.
В этом положении направление силы тяжести не пройдет через точку подвеса, и к гироскопу окажется приложенным некоторый маятниковый момент. Величина этого момента равна mga sin Θ; с увеличением угла Θ она возрастает.
Под действием маятникового момента возникает прецессионное движение гироскопа вокруг оси Z. Согласно правилу полюсов полюс гироскопа А будет двигаться к точке севера плоскости горизонта, которая является полюсом силы, т. е. к плоскости меридиана.
Следовательно, гироскоп, у которого центр тяжести находится ниже точки подвеса, принципиально превращается в гирокомпас. При отведении гироскопа от плоскости меридиана у него появляется направляющий момент, стремящийся привести его главную ось в плоскость меридиана.
Значение направляющего момента определяется формулой
R=JΩωcosφsinα,
где JΩ — кинетический момент гироскопа; ωcosφ — горизонтальная составляющая земного вращения; α — угол отклонения полюса гироскопа от плоскости меридиана.
Направляющий
момент достигает максимального значения
на экваторе при отведении главной оси
гироскопа от меридиана на 90°. С увеличением
широты направляющий момент уменьшается
и на полюсе обращается в нуль. Поэтому
на полюсе гирокомпас работать не может.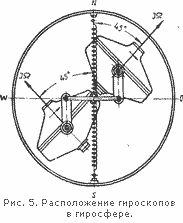
В гирокомпасах типа «Курс» чувствительный элемент представляет собой герметически закрытый шар, называемый гиросферой. Подвес гиросферы обеспечивает возможность вращения вокруг всех трех осей. Для предупреждения вредного влияния качки гироскопическая система гиросферы смонтирована из двух гироскопов.
Гироскопы расположены в гиросфере под углом 90° друг к другу и под углом 45° к линии NS гиросферы (рис. 5). Гироскопы связаны между собой кривошипом, а с оболочкой гиросферы — пружинами и могут вращаться вокруг своих вертикальных осей.
Кинетический
момент одного из гироскопов направлен
на северо-восток, второго—на северо-запад.
Разложим по правилу параллелограмма кинетические моменты на их составляющие по осям OW и NS (рис. 6). Составляющие по оси OW взаимно уничтожатся, а составляющие по оси NS сложатся. Поэтому систему двух гироскопов можно рассматривать как одногироскопную, суммарный кинетический момент которой направлен по оси NS и равен H = 2/Ω cos 45° = √2 / Ω (рис.7).
Следовательно, поведение гиросферы при вращении Земли будет аналогично поведению чувствительного элемента одногироскопного маятникового гироскопа.
Устройство гироскопических навигационных приборов.
Гиироскопические приборы, электромеханические устройства, содержащие Гироскопы, и предназначенные для определения параметров, характеризующих движение (или положение) объекта, на котором они установлены, а также для стабилизации этого объекта. Г. у. используют при решении задач навигации, управления подвижными объектами и др.
Наиболее существенными признаками, характеризующими применяемые в технике разнообразные Г. у., являются: тип гироскопа, физический принцип построения чувствительного гироскопического элемента, тип подвеса, назначение Г. у.
Типы гироскопов. Различают два основных типа гироскопов: с тремя и двумя степенями свободы. Гироскопы с тремя степенями свободы делятся на уравновешенные, или астатические, и неуравновешенные, или позиционные.
Астатическим называется гироскоп, у которого центр тяжести совпадает с точкой пересечения осей карданова подвеса (т. е. с точкой подвеса). Сила тяжести не влияет на движение оси такого гироскопа и её уходы при внешних возмущениях могут вызываться лишь моментами сил в осях подвеса (моменты сил трения и др.). При отсутствии моментов внешних сил гироскоп называется свободным. Хотя астатические гироскопы не обладают избирательностью по отношению к заданному направлению, т. е. "направляющей силой", стремящейся привести ось гироскопа в определенное положение, они используются в ряде Г. у., например, в гироскопах направления (См. Гироскоп направления), гировертикалях и др., причём прецизионные гироскопы могут применяться без корректирующих устройств.
Позиционным называется гироскоп, обладающий избирательностью по отношению к некоторому направлению; при отклонении его оси от этого направления возникает "направляющая сила", стремящаяся вернуть ось гироскопа в заданное положение. Для придания Г. у. позиционных свойств применяют два способа. Первый состоит в смещении центра тяжести гироскопа относительно точки подвеса. Он используется в Гирокомпасах, у которых "направляющая сила" возникает при отклонении оси гироскопа от плоскости меридиана, и в гиромаятниках, у которых "направляющая сила" возникает при отклонении оси гироскопа от вертикали места. Др. способ состоит в применении астатического гироскопа и соответствующей системы коррекции, например маятниковой (см. Гировертикаль).
Гироскопы с двумя степенями свободы используют в Г. у. чаще всего в качестве дифференцирующих и интегрирующих гироскопов, которые осуществляют дифференцирование (или интегрирование) входного сигнала, т. е. измеряют производную (или интеграл) от той величины, на воздействие которой реагирует Г. у. Например, в Гиротахометре дифференцирующий гироскоп, реагируя на поворот объекта, измеряет его угловую скорость, а поплавковый интегрирующий гироскоп (см. Гироскопический интегратор), реагируя на угловую скорость объекта, измеряет угол его поворота.
Физические принципы построения чувствительных гироскопических элементов. Различают гироскопы с механическим ротором, с жидкостным ротором, вибрационные, лазерные, ядерные. Наиболее распространены гироскопы с механическим ротором: у них носителем кинетического момента является быстровращающееся массивное твёрдое тело - ротор. Носителем кинетического момента может быть и жидкая среда. Вибрационные гироскопы (См. Вибрационный гироскоп) в качестве чувствительного элемента содержат вибрирующие массы (например, ротор с упругим подвесом или упругие пластины) и служат для определения угловой скорости объекта. Лазерный гироскоп представляет собой устройство, в котором используется оптический Квантовый генератор направленного излучения и содержится плоский замкнутый контур (образованный тремя и более зеркалами), где циркулируют два встречных световых потока (луча); он также служит для определения угловой скорости объекта (см. Квантовый гироскоп). Ядерный гироскоп основан на том свойстве, что ядро атома содержит протоны, обладающие спиновыми и орбитальными моментами количества движения, а также связанными с ними магнитными моментами. При этом наличие механического вращательного момента у ядра сообщает ему свойства гироскопа, а наличие магнитного момента даёт возможность ориентировать ось этого гироскопа в пространстве и определять её положение. Ядерные гироскопы могут использоваться в качестве стабилизаторов направления, датчиков угловых скоростей.
Типы подвесов гироскопов. В гироскопах с механическим ротором различают механический, поплавковый, газовый, магнитный, электростатический типы подвесов. В большинстве Г. у. используются гироскопы с механическим подвесом; выполненным в виде карданова подвеса (см. Гироскоп).
В различных двух- и трёхстепенных гироскопах для разгрузки механических опор применяются жидкостные, или поплавковые, подвесы (например, в поплавковом интегрирующем гироскопе), вследствие чего подобные гироскопы мало подвержены вибрационным, ударным и др. возмущающим воздействиям и обладают высокой точностью.
Существенное повышение точности Г. у. достигается при применении гироскопов с газовым подвесом. Ротор такого гироскопа обычно имеет сферическую форму и опирается па чрезвычайно тонкий газовый слой, образующийся между шаром-ротором и специальной опорой. Такой шар является практически свободным гироскопом. Газовые опоры могут также применяться в осях подвеса ротора и кардановых колец.
В некоторых Г. у. используется гироскоп с магнитным подвесом, ротор которого, выполненный в виде ферритовой сферы, поддерживается магнитным полем во взвешенном состоянии. Необходимые характеристики поля автоматически регулируются специальной следящей системой. Другой разновидностью магнитного подвеса является т. н. криогенный подвес ротора, в котором используется взаимодействие магнитных полей, создаваемых токами в сверхпроводниках (См. Сверхпроводники). Поддерживающие силы магнитного поля возникают при изменении положения ротора по отношению к элементам подвеса. Материал ротора, катушек электромагнитов и специальных экранов приводится в сверхпроводящее состояние путём глубокого охлаждения.
В гироскопе с электростатическим подвесом ротор представляет собой полую сферу, наружная поверхность которой имеет высокую проводимость. Ротор помещается между электродами, к которым подводится высокое напряжение, регулируемое специальной следящей системой. Под действием электростатических сил ротор центрируется в пространстве между электродами.
Основные Г. у. По назначению Г. у. подразделяют на следующие группы: 1) Г. у. для определения угловых отклонений объекта. Сюда относятся различные астатические и позиционные гироскопы, а именно: гироскопы направления, определяющие азимутальные отклонения объекта (углы рыскания корабля или летательного аппарата), и гировертикали или гиромаятники, определяющие отклонения объекта относительно плоскости горизонта (углы килевой и бортовой качки корабля, углы тангажа и крена летательного аппарата); 2) Г. у. для определения угловых скоростей и угловых ускорений объекта, в которых используются дифференцирующие гироскопы. К ним относятся гиротахометры и вибрационные гироскопы, определяющие угловые скорости вращения объекта и гиротахоакселерометры, определяющие угловые скорости и угловые ускорения вращения объекта; 3) Г. у. для определения интегралов от входных величин, в которых используются интегрирующие гироскопы: гироскопические интеграторы угловых скоростей, определяющие углы отклонения объекта; интегро-дифференцирующие гироскопы, определяющие углы и угловые скорости вращения объекта, а также гироскопические интеграторы линейных ускорений, которые служат для нахождения линейной скорости объекта; 4) Г. у. для стабилизации объекта или отдельных приборов и устройств, а также для определения угловых отклонений объекта, называют Гиростабилизаторами; 5) Г. у. для решения навигационных задач. Сюда относятся: гирокомпасы, определяющие курс объекта и азимут (пеленг) ориентируемого направления; гиромагнитные компасы (См. Гиромагнитный компас), определяющие магнитный курс объекта, гирошироты, предназначенные для определения широты места; гирошироткомпасы, с помощью которых определяются курс и широта местоположения объекта; гирогоризонткомпасы, служащие для определения курса объекта и углов отклонения его относительно плоскости горизонта, инерциальные навигационные системы (См. Инерциальная навигационная система), которые предназначены для нахождения ряда параметров, необходимых для навигации объектов; Гироорбитанты, которые служат для определения углов рыскания, искусственного спутника Земли; гирорулевые, обеспечивающие автоматическое управление курсом корабля.
Г. у. применяют в морском флоте, авиации, ракетной и космической технике, народном хозяйстве для решения разнообразных задач навигации и управления подвижными объектами, а также при проведении некоторых специальных работ (маркшейдерских, геодезических, топографических и др. - см. Гиротеодолит)