

KonspektOKPMRES
.pdf
|
L1 |
|
|
|
V1 |
10mH |
|
|
|
|
|
|
|
|
-1/1V |
|
|
V1 |
X1 |
|
|
|
||
|
C1 |
|
-1/1V |
|
|
10nF |
|
|
|
500 Hz |
R1 |
R2 |
|
X2 |
|
50 |
20k |
500 Hz |
|
|
|
|
|
|
|
Рис. 13.5. |
|
Рис. 13.6. |
|
Вначале найдем передаточную функцию фильтра K(p). В общем случае, если звено представляется в виде схемы на рис. 13.6, то передаточная функция определится как K(p)=X2/(X1+X2).
В нашем случае X1=pL, а X2=X3*R2/(X3+R2), где X3=R1+1/(pC).
Поэтому
X2=(R2+pCR1R2)/[1+pC(R1+R2)]
и передаточная функция составит
X2 |
(R2+pCR1R2)/[1+pC(R1+R2)] |
|
|
|
|||
K(p)= |
= |
|
|
|
= |
|
|
|
|
|
|
||||
X1+X2 |
pL+(R2+pCR1R2)/[1+pC(R1+R2)] |
|
|
|
|||
R2+p(CR1R2) |
|
1+p*τ1 |
|
|
(13.3) |
||
= |
|
|
= |
|
|
, |
|
|
|
|
|
||||
R2+p(CR1R2+L)+p2LC(R1+R2) |
|
1+p*τ2+ p2 *τ32 |
|
|
|
||
где τ1=CR1=5*10-7=0.5u, τ2=CR1+L/R2=10-6=1u, τ32=LC(1+R1/R2)=1.002*10-10=100.2p.
Для контроля правильности преобразований следует обращать внимание на единицы измерения: слагаемые числителя и знаменателя – безразмерны.
Выполняя далее обратное преобразование Лапласа, получаем дифференциальное уравнение RLC-фильтра
τ32d2y(t)/dt2 + τ2dy(t)/dt + y(t) = τ1dx(t)/dt + x(t) |
(13.4) |
Исходя из свойств (13.2), можно убедиться, что ДУ (13.4) описывает ФНЧ (a3 = 0 и b3 ≠ 0) второго порядка.
71
В случае, когда в K(p) степень числителя равна степени знаменателя (РФ, ФВЧ) для улучшения сходимости выражение (13.4) необходимо представить как функцию разности z(t)=x(t)-y[x(t)]:
τ32d2(x-y)/dt2+τ2d(x-y)/dt2+ax-by=0 (13.3)
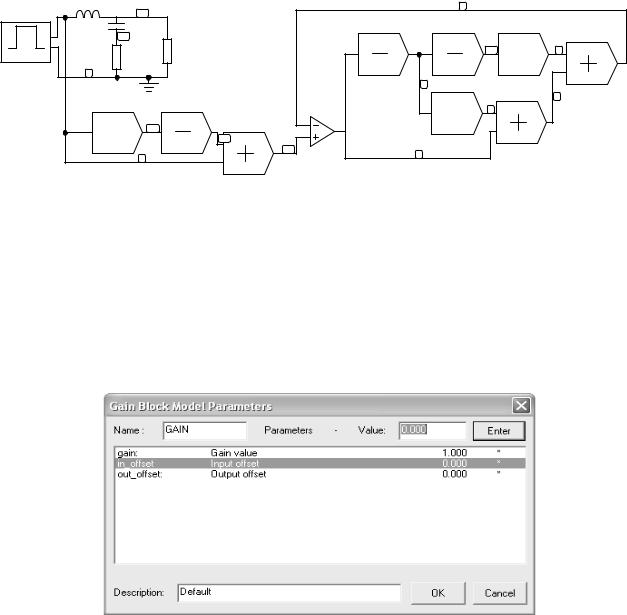
Для решения уравнения (13.4) в пакете Circuit Maker вводим следующую схему.
|
10m |
|
|
|
|
6 |
|
|
|
-1/1V |
14 |
|
|
|
|
|
|
|
|
10n |
|
|
|
|
|
|
|
|
|
|
|
|
DDT |
|
DDT |
|
TAU32 |
SUM |
|
|
15 |
|
|
d |
|
d |
|
|
|
500 Hz |
50 |
|
20k |
|
10 |
gain |
8 |
||
|
dt |
|
dt |
||||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
TAU2 |
|
|
|
|
|
|
|
|
|
|
SUM |
|
|
|
TAU1 |
|
DDT |
|
|
|
|
7 |
|
|
|
IDEAL |
|
gain |
9 |
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
gain |
13 |
d |
SUM |
|
|
|
|
|
|
|
dt |
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 13.7. |
|
|
|
|
|
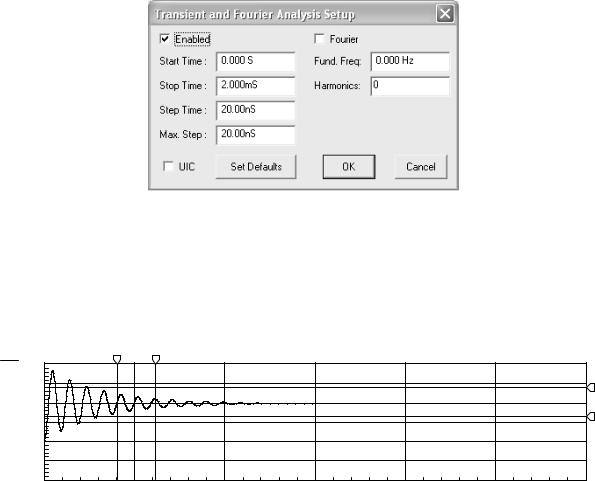
Вначале из базы данных по пути Function Block -> Misc. -> Gain устанавливаем блок по умолчанию. Затем последовательно каждый блок редактируем: двойное нажатие и в окне Edit/Select Model нажимаем кнопку Edit. Открывается новое окно (рис. 13.8), в котором указывается имя нового блока и величина усиления путем нажатия кнопки Enter.
Рис. 13.8.
Значение усиления нужно вводить как можно точнее. После редактирования нужно назначить необходимый блок GAIN в схеме.
72
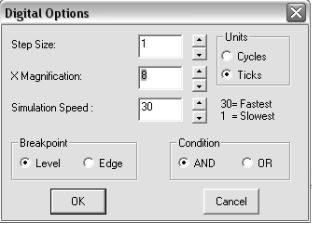
Далее устанавливаем тип моделирования. В данном случае – временную характеристику.
Запускаем моделирование. Если появляется сообщение “Step too small”, то в установках Simulation -> Analyses Setup -> Analog Options задаем большее число шагов поиска решения: ITL4 - max, transient analyses time point iterations - вместо 40 ставим 100…500.
Если моделирование прошло успешно, то сравниваем результаты прямого расчета переходной характеристики фильтра с решением дифференциального уравнения (клавиша Shift для одновременного вывода нескольких графиков).
Далее повышаем точность вычисления путем уменьшения шага интегрирования:
Рис. 13.9.
При этом время счета существенно увеличивается. В результате можно добиться практически полного совпадения переходных характеристик
Xa: |
411.1u |
Xb: |
268.9u |
a-b: |
142.2u freq: 7.031k |
Yc: |
1.800 |
Yd: |
300.0m |
c-d: |
1.500 |
ba
A3
B
2
c
1
d
0
-1
-2
-3
0 |
333u |
667u |
1m |
1.33m |
1.67m |
2m |
|
|
Ref=Ground |
X=333u/Div Y=voltage |
|
|
|
Рис. 13.10.
Для некоторых схем в лабораторной работе №5 совпадение наступает со второго полупериода, что связано с выбором начальных условий в CM. Вместе с файлом *.ckt моделирования функцио-
73
нальной схемы нужно предоставить файл GAIN.MOD, который расположен в папке Models.
Контрольные вопросы
1.Дайте определение функциональной схемы.
2.Что такое дифференциальное уравнение и какое решение оно дает?
3.Получите дифференциальное уравнение для интегрирующего звена.
4.Опишите методику решения дифуравнения с помощью ОУ.
5.Нарисуйте функциональную схему определения переходной характеристики RC-звена на основе решения дифуравнения.
74

14. Моделирование цифровых схем. Часть 1
Перед тем, как процессор сгорит, в его памяти проносятся все операции, которые он совершал в своей жизни
14.1. Преимущества и недостатки цифровых схем по сравнению с аналоговыми
Для аналогового сигнала характерна непрерывность, соответствие некоторой физической величине. Здесь схема моделируется так, как если бы это был реальный макет.
|
|
|
Усил. |
|
|
|
|
|
|
МКФ |
|
|
|
Фильтр |
|
|
|
|
|
|
|
|
|
|
(Анал. |
|
|
|
|
|
|
|
|
|
|
Усил. |
|
Гр. |
|
|
|
|
|
|
обраб.) |
|
|
||
|
|
|
Магни- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тофон |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 14.1.
Достоинства аналоговых схем:
•Простота – мало элементов, невысокая стоимость
•Высокое быстродействие – все элементы работают одновременно Недостатки аналоговых схем
•Низкая помехозащищенность: наводки и тепловые шумы
•Низкая точность и стабильность выполнения операций
•Низкая надежность хранения информации
Для цифрового сигнала характерны дискретность по времени и уровню, а также определенный способ организации (кодирования) данных. Моделирование осуществляется на уровне логики с задержками отсчетов.
МКФ |
|
Усил |
|
АЦП |
|
Цифр. |
|
ЦАП |
|
Усил |
|
Гр. |
|
|
|
|
|
|
Функ. |
|
|
|
|
|
|
|
|
|
|
HD,CD |
|
|
|
|
|
|
|
|
|
|
|
|
|
преобр |
|
|
|
|
|
|
|
|
|
|
|
Flash |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 14.2.
Достоинства цифровой обработки:
•Высокая помехозащищенность
•Высокая точность преобразования
75
•Эффективность хранения данных
•Программируемость
•Предсказуемость и технологичность Недостатки цифровых методов:
•Низкое быстродействие
•Сложность
•Высокая стоимость
14.2.Системные параметры цифровых схем
1.Метод представления данных. Цифровые данные могут представляться в параллельном или последовательном коде. Парал-
лельный код передается по n линиям (разрядам). Общее количество состояний равно 2n. Последовательный код передается по одной линии, но с тактовой частотой в 2n раз больше. Данные могут быть представлены как с фиксированной, так и с плавающей точкой.
2.Выбор разрядности. Определяется как большее из двух значений по таким параметрам:
•динамический диапазон – отношение максимального уровня к минимальному уровню передаваемых сигналов. Представляется обычно в децибелах. Здесь разрядность вычисляется по правилу 6 дБ динамического диапазона на один разряд.
•допустимая ошибка вычислений, которая составляет 1/2n.
3.Выбор тактовой частоты или частоты дискретизации. Определяется для параллельного кода теоремой Котельникова, согласно которой информация о передаваемом аналоговом сигнале не будет потеряна, если частота дискретизации fд при переходе к дискретному сигналу превышает удвоенную верхнюю частоту 2Fв передаваемого сигнала. Это объясняется тем, что при дискретизации спектр сигнала становится периодическим и если fд<2Fв, то границы спектров будут суммироваться и разделить их при переходе к аналоговому сигналу будет невозможно, т.е. неизбежно возникнут ошибки. На практике обычно частоту дискретизации берут как fд=3…5Fв для снижения требований к ФНЧ на выходе цифроаналогового преобразователя.
76
14.3.Особенности моделирования цифровых схем
вCircuit Maker
Моделирование цифровых схем в CM производится по тактам в виде логических операций и задержек сигналов, кратных числу тактов.
Установка режима цифрового моделирования производится нажатием 12-й кнопки слева из панели инструментов: изображение транзистора на кнопке переключается в изображение логического элемента И.
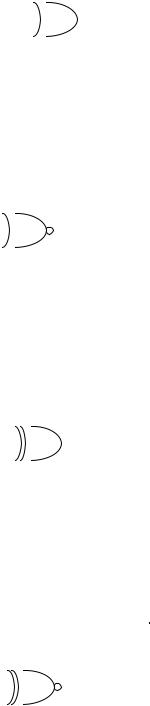
Моделирование возможно в автоматическом режиме и по шагам. Параметры режима цифрового моделирования задаются в опции Simulation (√ Digital Mode – снять флажок Analog) -> Digital Options. Открывается окно установок (рис. 14.3).
Рис.14.3. Окно Digital Options
Здесь задается размер шага Step Size, который определяет цифровую задержку. Units – единицы шага моделирования: либо по тактам Ticks (подробно, но долго), либо по циклам Cycles=10*Ticks (грубо, но быстро). X Magnification – масштаб цифрового осциллографа (по умолчанию 8 тиков). Скорость моделирования – Simulation Speed. Условие прерывания моделирования: AND – все логические действия схемы должны выполниться прежде, чем моделирование прекратится, OR – моделирование прекращается по первому требованию.
Чтобы активизировать цифровой осциллограф, необходимо нажать кнопку с осциллограммами на панели инструментов. Если нажать также кнопку с инвертором на панели инструментов, то линии
77

с высоким и низким уровнем будут отображаться, соответственно, красным и синим цветом.
14.4. Цифровая базовая логика NOT, AND, OR, XOR и
D-триггер
1) Инвертор – схема НЕ (NOT).
Формирует на выходе логическое значение, противоположное входному сигналу. Электрическая схема и таблица истинности представлены на рис. 14.4.
|
|
|
|
|
X |
Y |
x |
|
|
|
y |
1 |
0 |
|
|
|||||
|
|
|
|
|
0 |
1 |
Рис. 14.4. Схема НЕ
2) Логическое умножение – схема И (AND)
Выходной сигнал y=x1*x2 равен единице, только когда оба входных сигнала равны единице.
|
|
|
|
|
|
X1 |
X2 |
Y |
|
x1 |
|
|
|
|
|
0 |
0 |
0 |
|
|
|
|
|
|
|||||
|
|
|
y |
0 |
1 |
0 |
|||
x2 |
|
|
|
|
|||||
|
|
|
|
||||||
|
|
|
|
|
|
|
|||
1 |
0 |
0 |
|||||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
1 |
1 |
1 |
|
Рис. 14.5. Схема И
3) Логическое умножение с отрицанием – схема И-НЕ (NAND) Отличается от схемы И дополнительным инвертированием выходного сигнала. Инвертирование обозначается кружком на выходе
схемы.
|
|
|
|
|
|
X1 |
X2 |
Y |
|
x1 |
|
|
|
|
|
0 |
0 |
1 |
|
|
|
|
|
|
|
|
|
||
y |
0 |
1 |
1 |
||||||
|
|
|
|
||||||
x2 |
|
|
|
|
|||||
|
|
|
|
||||||
|
|
|
|
|
1 |
0 |
1 |
||
|
|
|
|
|
|
||||
|
|
|
|
|
|
1 |
1 |
0 |
Рис. 14.6. Схема И-НЕ
78
4) Логическое сложение – схема ИЛИ (OR)
Выходной сигнал y=x1+x2 равен единице, если хотя бы один из входных сигналов равен единице. Является схемой И для нулевых уровней входных сигналов.
|
|
|
|
|
|
|
X1 |
X2 |
Y |
x1 |
|
|
|
|
|
|
0 |
0 |
0 |
|
|
|
|
|
|
||||
|
|
|
y |
0 |
1 |
1 |
|||
|
|||||||||
x2 |
|
|
|
|
|
||||
|
|
|
|
|
|||||
|
|
|
|
1 |
0 |
1 |
|||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
1 |
1 |
1 |
Рис. 14.7. Схема ИЛИ |
|
|
|||||||
5) Логическое умножение с отрицанием – схема ИЛИ-НЕ (NOR) Добавлено инвертирование к схеме ИЛИ.
x1 |
|
|
|
|
|
|
X1 |
X2 |
Y |
|
|
|
|
|
|
|
|
|
|
||
y |
0 |
0 |
1 |
|||||||
|
|
|
|
|
||||||
x2 |
|
|
|
|
|
|||||
|
|
|
|
|
||||||
|
|
|
|
0 |
1 |
0 |
||||
|
||||||||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
1 |
0 |
0 |
|
|
|
|
|
|
|
|
1 |
1 |
0 |
|
Рис. 14.8. Схема ИЛИ-НЕ
6)Суммирование по модулю 2 – схема исключающее ИЛИ (XOR)
x1 |
|
|
|
|
|
X1 |
X2 |
Y |
|
|
|
|
|
|
|||||
|
|
|
y |
0 |
0 |
0 |
|||
x2 |
|
|
|
|
|||||
|
|
|
|
||||||
|
|
|
|
|
|
|
|||
0 |
1 |
1 |
|||||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
1 |
0 |
1 |
|
|
|
|
|
|
|
1 |
1 |
0 |
|
Рис. 14.9. Схема исключающее ИЛИ
7) Исключающее ИЛИ с отрицанием (XNOR)
|
|
|
|
|
|
|
X1 |
X2 |
Y |
|
|
|
|
|
|
|
0 |
0 |
1 |
x1 |
|
|
|
|
|
y |
0 |
1 |
0 |
|
|
|
|||||||
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
1 |
0 |
0 |
||||
|
|
|
|
|
|
||||
|
|
|
|
|
|||||
|
|
|
|
||||||
|
|
|
|
|
|
|
1 |
1 |
1 |
Рис. 14.10. Схема исключающее ИЛИ-НЕ
79

8) D-триггер – элемент с двумя устойчивыми состояниями, т.е. ячейка памяти в 1 бит.
S
DQ
_
CP Q
R
Рис. 4.11. D-триггер
Кроме выводов питания микросхема содержит также информационный вход D (Data), счетный вход CP, входы установки в единицу S (Set) и в ноль R (Reset) на выходе Q. Выход Q всегда противоположен по значению Q. Запись данных в триггер со входа D производится в момент положительного фронта тактового импульса на выводе CP. Если выход Q соединить с D, то получим делитель частоты на 2 на выходе Q по отношению ко входу CP.
Контрольные вопросы
1.Раскройте преимущества и недостатки цифровых систем.
2.Как определить разрядность и тактовую частоту цифровых схем?
3.Каковы особенности моделирования цифровых устройств с CM?
4.Как задать цифровой режим работы?
5.Опишите действия цифровой логики NOT, OR, AND.
6.Что такое D-триггер и как он функционирует?
80