

Тема 1. Введение. Основные понятия и определения
Радиоавтоматика является базовой дисциплиной в системе подготовки бакалавров по направлению РТ и РБ и посвящена изучению принципов построения методом синтеза и анализа автоматических устройств, используемых в радиотехнических системах.
Радиоавтоматика является основным разделом технической кибернетики, изучающая общие закономерности построения автоматических систем независимо от их систем.
1.1 Разомкнутые и замкнутые системы автоматического управления (сау)
САУ – это система, которая поддерживает постоянные или изменяет по определённому закону те или иные технические величины.
САУ содержит 2 основных элемента:
- автоматическое управляющее устройство (АУУ);
- объект управления (ОУ)

где ОУ – это любая динамическая система, изменяющая свои параметры под действием внешних сил.
АУУ – вырабатывает сигнал управления, препятствующий к нежелательным изменениям параметрам ОУ под действием возмущающих воздействий.
САУ делиться на разомкнутые и замкнутые.
Разомкнутые называют системы, которые содержат канал прямой передачи сигнала.

где, ИВ – источник воздействия.
ПЭ – промежуточный элемент.
ОУ – объект управления.
Достоинства: простота, они всегда устойчивы.
Недостаток: низкая точность.
Замкнутые системы содержат канал прямой передачи сигнала и обратной связи.
Используют 2 принципа построения:
- регулирование по возмущению

Недостаток: трудно выделить возмущающее воздействие.
Достоинства: простота, устойчивость.
- регулирование по отклонению

Недостаток: необходимость обеспечивать устойчивость.
1.2 Классификация систем радиоавтоматики
Признаки классификации:
1. по характеру изменения задающего воздействия (по цели управления):
а) системы автоматической стабилизации
б) системы программного управления (задающее воздействие изменяется по заранее заданному закону)
в) следящая система (характер изменения задающего воздействия заранее неизвестен)
2. по принципу формирования сигнала:
а) непрерывные (управляющее воздействие непрерывно по времени и по уровню)
б) системы прерывистого управления, у которых управляющее воздействие дискретно по времени и квантовано по уровню (релейные системы)
в) параметрические (нестационарные системы, параметры которых изменяются независимо от управляющего воздействия)
3. по характеру связи между входными и выходными сигналами:
а) линейные (применим принцип суперпозиции)
б) нелинейные (функциональная связь), квадратичные
4. по степени приспсабливаемости к внешним и внутренним воздействиям:
а) обыкновенные (неприспосабливаемые)
б) адаптивные (система изменяет не только параметры, но и саму структуру)
Тема 2. Функциональные схемы систем радиоавтоматики и их параметры.
2.1 Система автоматической подстройки частоты (апч)
Система АПЧ предназначена для стабилизации промежуточной частоты, слежения, демодуляции, а так же используется в качестве доплеровского измерителя.
Функциональная схема АПЧ имеет следующий вид:
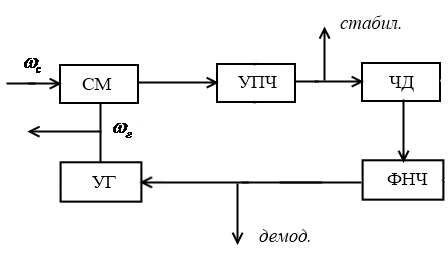
СМ – смеситель, который
вырабатывает бесконечно большое число
комбинационных составляющих
![]() .
.
УПЧ – усилитель промежуточной частоты, который подавляет комбинационные сигнала и выделяет сигнал промежуточной частоты.
ЧД – частотный дискриминатор, который вырабатывает напряжение пропорциональное отношению промежуточной частоты от собственной частоты настройки ЧД.
ФНЧ – фильтр низких частот, сглаживает выходной сигнал ЧД и обеспечивает заданную точность и заданную устойчивость системы.
УГ – управляемый гетеродин,
изменяет свою частоту в зависимости от
входного напряжения. При отсутствии
внешних возбуждений
![]() (номинальное значение частоты).
(номинальное значение частоты).
Пусть частота входного сигнала
изменилась
![]() .
На выходе ЧД
.
На выходе ЧД

Отсюда видно, что существует ошибка промежуточной частоты, при увеличе-
нии «К» она уменьшается.
Системы, у которых при постоянном входном воздействии при окончании переходного процесса ошибка не равно нулю и зависит от величины воздействия и параметров системы, называют статическими системами.
Системы, у которых при постоянном входном воздействии после окончания переходного процесса ошибка равна нулю, называют астатическими системами. Характерной особенностью является наличие в контуре регулирование интегратора.

В такой системе если
![]() на выходе интегратора управляющее
напряжение будет изменяться до тех пор,
пока
на выходе интегратора управляющее
напряжение будет изменяться до тех пор,
пока
![]() не
будет равно нулю, то есть ошибка будет
равна нулю.
не
будет равно нулю, то есть ошибка будет
равна нулю.