

3.3 Вимір напруги незаземлених джерел
Напруга незаземлених (що плавають, ізольованих) джерел сигналу може бути досить точно виміряна приймачем як з однофазним, так і з диференціальним входом. Однак при використанні диференціального входу потрібно стежити за тим, щоб величина синфазного сигналу не вийшла за границі діапазону працездатності приймача. Опір між кожним з диференціальних входів і «землею» дуже великий, тому навіть маленький струм завади може створити на ньому падіння напруги більше 10 В, що переведе приймач сигналу в режим насичення. Струм завади в цьому випадку може складатися з вхідних струмів зсуву самого диференціального приймача і струму паразитного ємнісного зв'язку з джерелом завади. Для зменшення цього ефекту входи диференціального приймача можна з'єднати з “землею” через резистори (рисунок 3.8).
Якщо внутрішній опір джерела сигналу великий, то резистори вибирають з однаковим опором. При низькому опорі джерела (як, наприклад, у термопар) різниця опорів не грає ролі і можна використовувати одне з них замість двох. Якщо джерело сигналу з'єднане з приймачем через конденсатори, що розв'язують, то величини резисторів повинні бути строго однакові. При вимірах з високою точністю ці резистори поліпшують симетрію диференціальної пари проводів і покращують ефект компенсації синфазної завади.

Рисунок 3.8 – Усунення насичення диференціального сигналу
приймача за допомогою резисторів
Опір резисторів вибирається як можна меншим, щоб знизити величину синфазного сигналу, однак він повинен бути багато більшим внутрішнього опору джерела сигналу, щоб не вносити похибку у результат виміру. При використанні термопар типова величина опорів лежить у діапазоні від 10 до 100 кОм.
Диференціальні приймачі сигналу завжди забезпечують більш високу завадозахищеність у порівнянні з приймачами з одиночним входом, однак вони вимагають більше сполучних проводів і технічно складніше. Тому вибір між диференціальним чи однофазним входом може бути зроблений тільки при розгляді конкретних умов застосування і вимог до системи.
В [ ] наведені результати експериментального порівняння величини завад для приймачів з однофазним і диференціальним входом. Як джерело сигналу був вибраний терморезистор опором 20 кОм, з'єднаний із приймачем крученою парою довжиною 5 метрів. В якості диференціального приймача був використаний інструментальний підсилювач RL-4DA200 і система збору даних RalLab! фірми RLDA. Перехід від однофазного включення до диференціального в даному випадку зменшує середньоквадратичне значення напруги завади в 136 разів. Це пояснюється тим, що підсилювач з одиночним входом сприймає заваду без ослаблення, а у диференціальному підсилювачі ця завада послабляється в Kcmrr разів (коефіцієнт придушення синфазного сигналу) .
Таким чином, можна зробити висновок, що приймачі з однофазним входом можуть бути використані, якщо джерело і приймач сигналів рознесені на невелику відстань (до одиниць метрів), або якщо сигнал джерела попереднє посилений чи має велику величину (близько 1 В), або якщо виводи “земля” джерела і приймача з'єднані в одній точці коротким провідником малого опору. Якщо хоча б одне з цих умов не виконується, варто використовувати приймачі з диференціальним входом.
3.4 Похибки, викликані кондуктивними зв'язками
Джерелом похибки при передачі сигналу може бути падіння напруги Vg на ділянці проводу, який є загальним для сигналу і деякого навантаження (рисунок 3.9).
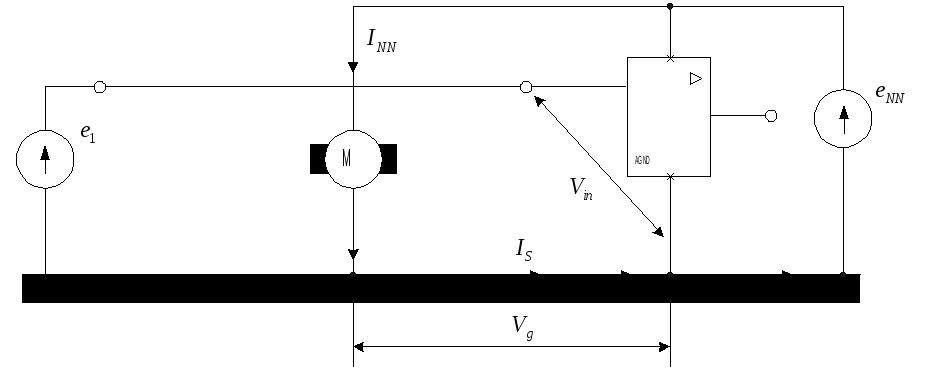
М – навантаження, eNN – еквівалентне джерело, Inn – струм, що протікає від еквівалентного джерела через навантаження
Рисунок 3.9 – Паразитний струм, що протікає по загальній ділянці
проводу “земля”, створює падіння напруги Vg.
Такий паразитний зв'язок називається кондуктивним (резистивним). Навантаженням у даному випадку може бути, наприклад, деяка допоміжна цифрова схема, заземлюючий провід комп'ютера чи випадковий провідник, що замкнув провід “земля” з корпусом енергетичного устаткування, через який протікає струм INN від еквівалентного джерела eNN.
Навіть схема, що складається з декількох операційних підсилювачів, може створити на проводі довжиною в 20 см падіння напруги більше 1 мВ, що порівняно з величиною молодшого значущого розряду 12-розрядного приймача сигналу. Особливо великі проблеми може створити цифрова схема, що працює в момент передачі аналогового сигналу. У результаті вхідна напруга Vin буде складатися з напруги джерела сигналу е1 і напруги завади Vg.
Рішенням описаної проблеми є приєднання «землі» джерела сигналу до приймача окремим ізольованим проводом, що не використовується ні для яких інших цілей (рисунок 3.10).

М — навантаження, eNN — еквівалентне джерело, INN — струм, що протікає від еквівалентного джерела через навантаження
Рисунок 3.10 – З’єднання “землі” джерела сигналу з “землею”
приймача окремим проводом
У загальному випадку, щоб заздалегідь запобігти виникнення даної проблеми, варто розрізняти поняття “сигнальна земля”, “аналогова земля”, “цифрова земля”. Усі ці “землі” повинні бути виконані різними проводами, і їх можна з'єднувати тільки в одній загальній точці.
Сигнальні ланцюги не можна використовувати для живлення навіть малопотужної апаратури.
3.5 Індуктивні і ємнісні зв'язки
Припустимо, що поруч із сигнальним проводом проходить деякий провід, по якому протікає струм амплітудою IN (рисунок 3.11).
Тоді внаслідок ефекту електромагнітної індукції на сигнальному проводі буде наводитися напруга завади VM. У випадку синусоїдальної форми струму амплітуда напруги завади, що наводиться на сигнальному проводі, буде дорівнює
![]()
![]() ,
(3.6)
,
(3.6)
де М — взаємна індуктивність між проводами;
L — індуктивність сигнального проводу;
w=2πf – кругова частота струму завади;
f - частота струму завади;
Ri, — вихідний опір джерела сигналу;
Rin, — вхідний опір приймача.

Рисунок 3.11 – Шляхи проходження ємнісної й індуктивної
завади від джерела eNN
Величина взаємної індуктивності М пропорційна площі витка, що перетинається магнітним полем, створеним струмом IN. «Витком» у даному випадку є контур, по якому протікає струм, викликаний ЕРС завади. На рисунку 3.11 цей контур утворений сигнальним проводом, вхідним опором приймача, проводом «землі» і вихідним опором джерела сигналу. Для зменшення взаємної індуктивності площа даного контуру повинна бути мінімальною, тобто сигнальний провід повинний бути прокладений максимально близько до «землі». Ефективну площу «витка» можна зменшити, якщо розташувати його в площині, перпендикулярній площині контуру зі струмом, що наводить завади.
З формули (3.6) випливає, що індуктивне наведення збільшується з ростом частоти й відсутнє на постійному струмі. Напруга завади на рисунку 3.11 включена послідовно з джерелом сигналу, тобто вносить адитивну похибку у результат виміру. При нескінченно великому опорі Rin напруга на вході приймача має вигляд:
Vin = e1 + w·M·N
і не залежить від опору джерела сигналу.
Ємнісне наведення через паразитну ємність між провідниками Сc, навпаки, цілком визначається величиною внутрішнього опору джерела сигналу Ri, оскільки воно входить у дільник напруги завади, що складається з опору Ri, включеного паралельно Rin і ємності Сc :
![]() .
(3.7)
.
(3.7)
Як випливає з (3.7), при Rin= 0 ємнісна завада цілком відсутня. У дійсності сигнальний провідник має деяке індуктивний і резистивний опір, спадання напруги завади на якому не дозволяє цілком усунути ємнісне наведення за допомогою джерела з низьким внутрішнім опором. Особливо важливо враховувати індуктивність сигнального проводу у випадку високочастотних завад.
Порядок величин опорів типових джерел сигналу приведений у таблиці 3.1.
Таблиця 3.1 – Типові датчики і порядок величин їхніх опорів
|
Джерело сигналу |
Повний опір |
|
Термопара |
Менше 20 Ом |
|
Терморезистор |
Більше 1 кОм |
|
Резистивний датчик опору |
Менше 1 кОм |
|
Напівпровідниковий датчик тиску |
Більше 1 кОм |
|
Тензометричний датчик |
Менше 1 кОм |
|
Скляний pH-електрод |
Більше 109 Ом |
|
Потенціометричний датчик переміщення |
від 500 Ом до 100 кОм |
|
Операційний підсилювач |
10-4 Ом |
Датчики, що мають великий внутрішній опір чи малу напругу сигналу, потрібно використовувати разом з підсилювачем, розташованим у безпосередній близькості до датчика, а до приймача варто передавати вже посилений сигнал.
З іншого боку, для усунення індуктивного наведення носієм сигналу повинний бути струм, а не напруга, тобто джерелом сигналу повинний бути ідеальне джерело струму (рисунок 3.12).
Струм джерела струму не залежить від характеру навантаження (по визначенню), у тому числі від величини наведеної ЕРС.
Таким чином, для зниження ємнісного наведення сигнал потрібно передавати за допомогою ідеального джерела напруги, а для зниження індуктивного наведення — за допомогою ідеального джерела струму.

Рисунок 3.12 – Канал передачі сигналу за допомогою струму,
який менш чутливий до індуктивних наведень
Вибір носія інформації (струм чи напруга) у кожному конкретному випадку залежить від того, яка завада переважає: індуктивна чи ємнісна. Як правило, ємнісні наведення переважають над індуктивними, якщо джерело завади має велику напругу. Індуктивні ж завади створюються струмом, тому вони великі у випадку, коли джерелом завади є потужне устаткування, що споживає великий струм. Відзначимо, що екранування магнітного наведення технічно набагато складніше, ніж ємнісного.
Прагнення сполучити переваги передачі сигналу у формі струму й у формі напруги приводить до передачі інформації сигналом великої потужності. Відношення потужності сигналу до потужності завади визначає величину похибки, внесену завадами в результат виміру. Цей же вивід випливає безпосередньо з формули (3.6); при опорах навантаження і джерела, що наближаються до нуля, напруга завади також наближається до нуля (а передана потужність — до нескінченності).
3.6 Паразитні зв'язки в диференціальних лініях передачі сигналу
Кардинальним засобом усунення індуктивних і ємнісних зв'язків є застосування джерел сигналу з диференціальним струмовим виходом і приймачів з низькоомним (струмовим) диференціальним входом (рисунок 3.13). У них індуктивне наведення мале, оскільки інформація передається у формі струму, а ємнісне наведення мале, оскільки при гарній симетрії лінії передачі воно є синфазним і придушується вхідним диференціальним приймачем. Додатковим захистом лінії є її екранування. Струми джерел струму на рисунку 3.13 строго рівні між собою і протилежно спрямовані.
Для одержання високої якості передачі сигнальні проводи повинні бути екрановані і виконані у вигляді крученої пари, щоб забезпечити кращу узгодженість їхніх подовжніх імпедансів і імпедансу на «землю». Різниця в довжині проводів і в частотних характеристиках їхніх імпедансів може бути причиною появи синфазної завади на високих частотах.

Рисунок 3.13 – Диференціальне джерело і приймач струму —
найкраще рішення проблеми якісної передачі сигналу
Для підвищення ступеня узгодженості ліній у кручений парі краще використовувати проводи, спеціально виготовлені й атестовані для інструментальних індустріальних застосувань (наприклад, фірми Belden). Використання двох кручених, з'єднаних паралельно, пар замість однієї пари дозволяє знизити подовжній імпеданс проводів і підвищити точність передачі сигналу.
Прикладом реалізації диференціального способу передачі сигналу може служити пара диференціального струмового передавача SSM2142 і диференціального приймача SSM2141 (Analog Devices), що має коефіцієнт ослаблення синфазного сигналу 100 дБ на частоті 60 Гц і працює на навантаження 600 Ом, створюючи на ній максимальне падіння напруги до 10 В.
Для запобігання насичення вихідних каскадів джерел струму різницею струмів (I1-I2) можна використовувати спосіб, аналогічний представленому на рисунку 3.8, однак резистори в даному випадку повинні бути з'єднані з “землею” джерела сигналу.
Недоліком струмових каналів передачі інформації є те, що відповідно до виразу (2.7) при нескінченно великому опорі джерела і приймача сигналу відносно «землі» напруга ємнісного наведення є максимальною. Застосування резисторів для відводу струму завади на землю (рисунок 3.8) поліпшує ситуацію, однак ці резистори не можуть бути вибрані дуже малими, оскільки при цьому збільшується вплив їхньої неузгодженості на похибку передачі струму.
3.7 Екранування сигнальних проводів
Методи екранування сигнального привода вибираються в залежності від шляхів проходження завади. Для усунення паразитного ємнісного зв'язку використовують електростатичний екран у вигляді провідної трубки (панчохи), що охоплює екрановані проводи, а для захисту від магнітного поля використовують екран з матеріалу з високою магнітною проникністю.
Не можна з'єднувати електростатичний екран з «землею» джерела і приймача одночасно (рисунок 3.14) оскільки при цьому через екран тече струм, обумовлений нерівністю потенціалів цих «земель» і сягаючий у цехових умовах декількох амперів, а різниця потенціалів «земель» може досягати декількох вольтів.

Рисунок 3.14 – Приклад неправильного заземлення екрана
Струм, що протікає по екрану, є джерелом індуктивних наведень на сусідніх проводах і проводах, що знаходяться усередині екрана. Наведення на проводи усередині екрана можуть мати значну величину при неточному їхньому центруванні внаслідок технологічного розкиду.
Тому екран потрібно заземлювати тільки з одного боку, причому з боку джерела сигналу. У загальному випадку при передачі сигналу з широкою смугою частот від віддаленого джерела з високим опором рекомендується використовувати популярну схему гібридного заземлення (рисунок 3.15).
У даній схемі ємність СHF дозволяє послабити високочастотну складову завади. У такий спосіб низькочастотний струм, що створює індуктивне наведення, залишається малим, а високочастотні наведення заземлюються через ємність.
Екран, що захищає від паразитних індуктивних зв'язків, зробити набагато складніше, ніж електростатичний екран. Для цього потрібно використовувати матеріал з високою магнітною проникністю і, як правило, набагато більшої товщини, ніж товщина електростатичних екранів. Для частот нижче 100 кГц можна використовувати екран зі сталі чи пермалою. На більш високих частотах використовуються алюміній і мідь.

Рисунок 3.15 – Приклад правильного заземлення екрана при передачі
сигналу від віддаленого джерела з високим опором
У зв'язку зі складністю екранування магнітної складової завади особливу увагу варто приділити зменшенню індуктивності сигнального проводу і вибору придатної схеми приймача і передавача.
Якщо джерело сигналу не заземлене, як, наприклад, у випадку більшості температурних датчиків, то екран застосовують у сполученні з диференціальним підсилювачем і резисторами на вході, призначення яких обговорювалося раніше. При цьому екран заземлюють, як показано на рисунку 3.16, а.
В [ ] було проведено експериментальне порівняння різних способів підключення джерела сигналу (терморезистор опором 20 кОм) через екрановану кручену пару (0,5 витка на сантиметр) довжиною 3,5 м. Був використаний інструментальний підсилювач RL-4DA200 із системою збору даних RL-40AI фірми RLDA.
Як випливає з рисунку 3.16, відмовлення від екранування збільшує амплітуду завади в 4 рази (б), перехід до однофазного включення замість диференціального (в) збільшує її в 5 разів, а якщо ще і відмовитися від екрана, то амплітуда завади збільшується в 230 разів (г).
На рисунках наведені середньоквадратичні значення амплітуди напруги завад у смузі частот від 0,01 до 5 Гц, отримані на виході приймача сигналу і приведені до його входу.

Рисунок 3.16. – Залежність середньоквадратичної амплітуди напруги
завади від способу включення підсилювача й екрана (а –
амплітуда завади 15 мкВ, б – амплітуда завади 61 мкВ,
в – амплітуда завади 78 мкВ, г – амплітуда завади 3584 мкВ)
3.8 Високочастотні електромагнітні й інші види завад
Високочастотні електромагнітні завади наводяться від таких джерел, як радіо і телевізійні передавачі, мобільні і радіотелефони, тиристорні перетворювачі, колекторні електродвигуни, електрозварювальне устаткування, дисплеї комп'ютерів і самі комп'ютери. Завади з частотою вище 100 кГц звичайно знаходяться за кордоном частотного діапазону вимірювальних систем, однак високочастотні завади можуть бути небажаним образом випрямлені чи перенесені в область більш низьких частот через нелінійність характеристик діодів і транзисторів, розміщених на вимірювальній системі й усередині мікросхем.
У системах з дуже високою чутливістю можуть спостерігатися паразитні напруги, викликані термоелектричним ефектом у контактах різнорідних металів, трибоелектрикою, що виникає при терті діелектриків друг об друга, п'єзоелектричним ефектом і ефектом електростатичного чи електромагнітного мікрофона. Ці джерела завад небезпечні тим, що вони зустрічаються рідко, тому про них найчастіше забувають.
3.9 Практичні рекомендації по вибору схемного способу захисту
На практиці вирішення проблеми завад варто починати з пошуку їхнього джерела. Для цього, у першу чергу, варто вимірювати рівень завад окремо в приймачі сигналу, у джерелі й у сполучному кабелі. Для перевірки приймача необхідно максимально коротким проводом з'єднати його вхід (чи входи для диференціального приймача) з виводом «земля» системи. Не можна залишати частину входів багатоканальної системи заземленою. На виході при цьому будуть спостерігатися власні шуми приймача сигналу. Потрібно переконатися, що рівень шумів відповідає специфікації на виріб. Якщо маються розбіжності, то ймовірною причиною можуть бути джерела завад, що впливають безпосередньо на плату вимірювальної частини системи, чи неправильне підключення ланцюгів живлення і накопичування. Для їхнього виявлення можна спробувати змінити місце розташування вимірювальної частини.
Для виміру рівня завад, що наведені у кабелі, потрібно підключити його до системи збору даних і закоротити кабель з боку джерела сигналу, тобто імітувати нульовий внутрішній опір джерела. Якщо рівень завади буде сильно відрізнятися від її рівня у випадку, коли джерело сигналу підключене, то причина може бути в недостатньо низькому опорі джерела, і для його зменшення варто використовувати придатний узгоджувальний підсилювач чи вибрати більш завадостійкий спосіб передачі сигналу.
Для оцінки рівня завад джерела його потрібно з'єднати максимально коротким проводом із входом приймача.
Якщо джерело завад заздалегідь невідоме, його пошуку може допомогти спектральний аналіз завади.
Для збільшення точності передачі кожен сигнал повинний передаватися крученою парою в індивідуальному екрані. При виготовленні кручених пар для індустріальних застосувань особливе значення приділяється симетрії імпедансів проводів у парі і рівномірності їхніх частотних характеристик у смузі робочих частот. Рівномірність характеристики дозволяє виконувати компенсацію асиметрії ліній і тим самим зменшувати вплив паразитних наведень. Для зменшення паразитних наведень, створюваних на кабелі магнітною складовою електромагнітного випромінювання, необхідно забезпечити мінімально можливий крок скрутки провідників у крученій парі і мінімальній площі петель, що утворяться при підключенні крученої пари до джерела і приймача сигналу.
При невисоких вимогах до точності можуть бути використані кручені чи некручені сигнальні проводи в загальному екрані. Однак у цьому випадку з'являються індуктивні і ємнісні взаємовпливи провідників у кабелі, а також кондуктивні зв'язки через загальний провід заземлення екрана.
Якщо смуга частот сигналу менша, ніж смуга приймача, чи якщо деякі параметри сигналу відомі заздалегідь, то для зменшення завад можна використовувати аналогові фільтри на вході системи. Для ослаблення завади з частотою 50 чи 60 Гц звичайно використовують фільтри третього порядку, що мають нахил АЧХ у смузі загородження мінус 60 дБ на декаду Якщо виміри провадяться на частотах, близьких до граничної частоти фільтра, варто враховувати похибка коефіцієнта передачі фільтра в смузі пропускання.
Подальше ослаблення завад можливо шляхом цифрової фільтрації. Однак вона не може цілком замінити аналогову в зв'язку з тим, що її можливості обмежені швидкодією системи збору даних, необхідним часом виміру і розрядністю аналого-цифрового перетворювача.
3.10 Іскробезпечне електричне коло з датчиками
У ряді технологічних процесів датчик необхідно розташовувати у вибухонебезпечній зоні. При цьому повинне створюватися іскробезпечне електричне коло з цим датчиком.
Іскробезпечне електричне коло визначається як коло [ ], у якому розряди чи термічні дії, що виникають під час нормального режиму роботи електроустаткування, а також в аварійних режимах, не викликають запалення вибухонебезпечної суміші.
Датчики ніколи не застосовуються окремо. Як правило, вони є частиною підсистеми введення. Спрощена схема такої іскробезпечної підсистеми показана на рисунку 3.17. Підсистема містить у собі електроустаткування, розміщене у вибухонебезпечній зоні (первинний перетворювач і його вимірювальна схема), електроустаткування, розміщене у вибухобезпечній зоні (пристрої зв'язку з об'єктом - ПЗО), і електропроводку між ними.

Рисунок 3.17 – Спрощена схема іскробезпечної підсистеми
введення сигналів датчика
ПЗО може приймати сигнали від датчика, передавати на нього сигнали управління і забезпечувати живлення його вимірювальної схеми. Для сполучення датчика, розташованого у вибухонебезпечній зоні, з таким ПЗО, що знаходиться у вибухобезпечній зоні (зв'язане електроустаткування), повинні застосовуватися певні обмежувальні елементи. Обмежувальні елементи можна розділити на дві групи:
діодні бар'єри безпеки, чи пасивні бар'єри;
гальванически ізольовані бар'єри безпеки, чи активні бар'єри.
На рисунку 3.18 наведена схема застосування двоканального пасивного бар'єру Z765 виробництва фірми “Pepperl+Fuchs” з датчиком температури ТСПУ Метран-276-Ех [ ].
На схемі показані: з’єднувач XS датчика ТСПУ Метран-276-Ех, вхідний опір RВХ ПЗО, джерело живлення датчика G. Загальний опір кола датчика (2RO + RВХ) не повинен виходити за границі 100-1000 Ом.
Принцип дії пасивного бар'єра полягає в наступному: у випадку появи небезпечної напруги на затискачах ПЗО, значення якої перевищує напругу стабілізації стабілітронів, відбувається їхній пробій на землю і спрацьовує запобіжник. Конструктивно пасивний бар'єр являє собою єдиний нерозбірний блок, залитий компаундом, стійкий до умов експлуатації.
Застосування двоканальних бар'єрів не вимагає безпосереднього заземлення іскробезпечних електричних кіл датчика. Заземлення відбувається тільки при аварійному режимі, коли спрацьовують стабілітрони.

Рисунок 3.18 – Схема підключення датчика ТСПУ Метран-276-Ех
через пасивний бар’єр Z765 до ПЗО
Основні гідності пасивних бар'єрів:
низька вартість елементів;
надійний і нескладний принцип дії;
можливість перетворення стандартного датчика в іскробезпечний;
велика гнучкість.
Активні розділювальні пристрої (бар'єри) мають джерело напруги чи формувачі сигналів, що передають чи приймають сигнали з вибухонебезпечних зон через ізольований тракт (рисунок 3.19).
Тому що вхідний ланцюг є плаваючий по відношенню до землі, то при ушкодженні струм не протікає через обмежуючі кола, тому немає необхідності заземлювати це коло.
Гідності активних бар'єрів:
немає необхідності в системі заземлення;
можуть бути застосовані заземлені первинні перетворювачі;
гальванічна ізоляція знімає проблеми зворотних струмів і забезпечує високий коефіцієнт придушення перешкоди загального виду;
Довжина кабельних з'єднань іскробезпечного датчика зі зв'язаним електроустаткуванням ПЗО може бути обмеженою через здатність кабелю накопичувати енергію.
досягається більш висока точність вимірів.
Іскровий захист датчика вимагає, щоб були заземлені певні точки підсистеми введення, а інші повинні бути ізольованими від землі. Як правило, заземлення іскробезпечних кіл використовується для запобігання чи навіть зменшення імовірності генерації надмірної енергії у вибухонебезпечній зоні. Припустимий опір між затискачем заземлення найбільш віддаленого пасивного бар'єра і ізопотенціальною точкою землі повинний бути менше 1 Ом.

Рисунок 3.19 – Схема підключення датчика через активний бар’єр
Застосування екранованих кабелів для з'єднання датчиків чи перетворювачів, розташованих у вибухонебезпечній зоні, з ПЗО у вибухобезпечній зоні є досить широко розповсюдженою практикою.
При цьому необхідно, щоб екран був правильно ізольований від металевої конструкції датчика, у противному випадку може мати місце ситуація, представлена на рисунку 3.20.

Рисунок 3.20 – Можлива небезпечна ситуація при заземленні екранів у
вибухобезпечній зоні
У випадку відсутності ізоляції між екраном і металевою конструкцією перетворювача у вибухонебезпечній зоні може утворитися надмірний рівень енергії. Якщо потенціал землі U1 відрізняється від потенціалу U2, то викликаний цим струм обмежується тільки опором екрана і виникаюча іскра може запалити вибухонебезпечне середовище. Ситуація може бути відвернена заземленням екрана у вибухонебезпечній зоні; при цьому іскра, що утвориться у вибухобезпечній зоні, не викликає пожежі чи вибуху.
У висновку можна відзначити, що застосування у вибухонебезпечних зонах датчиків загальнопромислового виконання з іскробезпечними колами є одним зі шляхів зниження капітальних витрат, підвищення надійності і безпеки експлуатації систем управління.
3.11 Програмні засоби підвищення достовірності вимірів
Від достовірності та метрологічної точності інформації, що постачають датчики системи, залежить якість усього процесу управління.
Для реальних датчиків, що працюють у виробничих умовах, треба враховувати різноманітні особливості та характерні викривлення вихідного сигналу, що можуть суттєво вплинути на процес управління. На рисунку 3.21 наведені приклади таких сигналів (де Х – вимірювана фізична величина - вхідний сигнал датчика; Y – реальний вихідний сигнал датчика).
Роздивимося більш докладно особливості цих сигналів. По-перше, вихідний електричний сигнал датчика тільки функціонально пов’язаний з вимірюваною величиною іншої природи, тобто числові значення вхідного та вихідного його сигналів не співпадають (рисунок 3.21, а). По-друге, за принципом дії в датчику може відбуватися постійне за значенням зміщення вихідного сигналу відносно нуля (рисунок 3.21, б). По-третє, до корисного вихідного сигналу датчика можуть додаватися або безперервні гармонічні (рисунок 3.21, в) чи випадкові (рисунок 3.21, г) паразитні сигнали від промислових завад (див. вище), або імпульсні випадкові паразитні сигнали (рисунок 3.21, д). По-четверте, під дією зовнішніх кліматичних факторів (температура, вологість тощо) може відбуватися повільний дрейф вихідного сигналу датчика у часі (рисунок 3.21, е). Є ще ряд особливостей та викривлень вихідних сигналів датчиків, але перераховані вище – найбільш характерні.
Для достовірного отримання корисної інформації про технологічний процес з таких викривлених сигналів крім описаних вище схемних способів в КСУ ТП знайшли широке застосування і програмні способи їх первинної обробки. Вони реалізуються прикладним ПЗ або на рівні мережного контролера, або на рівні операторської станції (АРМ).
До програмно реалізованих операцій первинної обробки відносяться:
компенсування дрейфу вихідного сигналу датчика;
збереження вихідних даних;
перевірка відповідності вихідних даних параметрам датчика

Рисунок 3.21 – Реальні сигнали електричних датчиків
(діапазону припустимих вихідних значень і діапазону швидкостей зміни вихідного сигналу);
відкидання аномального виміру ("сторонні" значення, що помітно відрізняються від інших, можливо, повинні бути відкинуті);
застосування цифрової фільтрації;
збереження відфільтрованих даних.
Після цифрової фільтрації виконуються:
перерахування одиниць виміру – масштабування (при необхідності);
лінеаризацію;
інші типи обробки даних, наприклад статистичний аналіз;
Програмна реалізація зазначених операцій первинної обробки сигналів датчиків будується на основі певного математичного забезпечення. Розглянемо його більш детально.
І снує
багато методів перевірки достовірності
вихідних даних. У першу чергу,
необхідно переконатися, що величина
вхідного сигналу лежить умежах
робочого діапазону
датчика. Вихід за його границі може
вказувати, наприклад, на виняткову
ситуацію, коли датчик відключений. Ця
перевірка не повинна являти собою
просте порівняння з попереднє встановленим
граничним значенням, бо в цьому випадку
навіть невеликі коливання біля цього
значення можуть викликати безліч
аварійних сигналів. Щоб уникнути
таких ситуацій зазвичай визначають
смугу гістерезису навколо граничного
значення (рисунок 3.22). Аварійний сигнал
генерується тільки тоді, коли вхідна
величина перевищить друге граничне
значення. Для того, щоб скинути
аварійний сигнал, вхідна величина
повинна знову перетнути перше
граничне значення. Новий аварійний
сигнал може бути вироблений після того,
як друге граничне значення сигналу
буде досягнуте знову.
снує
багато методів перевірки достовірності
вихідних даних. У першу чергу,
необхідно переконатися, що величина
вхідного сигналу лежить умежах
робочого діапазону
датчика. Вихід за його границі може
вказувати, наприклад, на виняткову
ситуацію, коли датчик відключений. Ця
перевірка не повинна являти собою
просте порівняння з попереднє встановленим
граничним значенням, бо в цьому випадку
навіть невеликі коливання біля цього
значення можуть викликати безліч
аварійних сигналів. Щоб уникнути
таких ситуацій зазвичай визначають
смугу гістерезису навколо граничного
значення (рисунок 3.22). Аварійний сигнал
генерується тільки тоді, коли вхідна
величина перевищить друге граничне
значення. Для того, щоб скинути
аварійний сигнал, вхідна величина
повинна знову перетнути перше
граничне значення. Новий аварійний
сигнал може бути вироблений після того,
як друге граничне значення сигналу
буде досягнуте знову.
Перевірка швидкості зміни сигналу дозволяє знайти помилки датчика. Якщо зміни вихідного сигналу датчика протягом декількох останніх інтервалів вибірки перевищують заздалегідь визначене значення, то виробляється аварійний сигнал. Контроль швидкості зміни повинний проводитися перед цифровою фільтрацією, у противному випадку зміни сигналу можуть бути втрачені і перевірка стає безглуздою.
Масштабування і лінеаризація. Зібрані значення вхідного вимірювального сигналу (див. рис. 3.21, а), щоб уникнути непорозумінь і помилок, повинні бути перелічені у відповідні інженерні одиниці виміру. Перетворення від внутрішнього представлення y до інженерних одиниць z звичайно можна зробити за допомогою простої лінійної залежності
![]() ,
(3.8)
,
(3.8)
де k1 і k2 — константи.
Для нелінійних датчиків ця залежність виражається більш складною функцією чи таблицею перетворення. Залежність стає більш складною, якщо характеристики датчика мають зону нечутливості чи гістерезис; в останньому випадку необхідно знати напрямок зміни сигналу – зростання чи убування.
Наприклад, важливо використовувати весь діапазон АЦП для збереження прийнятної точності. Якщо вимірювальний сигнал перевищує діапазон АЦП, то необхідно перевірити, що вихід перетворювача не "перекинувся" і не почався знову відлік з нуля. В цьому випадку, наприклад, напруга 10,1В може бути неправильно представлена як 0,1В, якщо межа діапазону АЦП дорівнювала 10В. Ця можливість уже передбачена як стандартна процедура в багатьох комп’ютерних системах і пристроях збору даних; однак подвійний контроль допомагає захиститися від несподіванок.
Усереднення. Вплив помилок вимірів можна зменшити за допомогою простого усереднення. Наприклад, АЦП може бути запрограмований для вибірки сигналу в 10 разів швидше, ніж необхідно, і тоді грубе значення можна одержати як середнє за 10 інтервалів вибірки. Додатково можна відкинути одне-два значення, що не укладаються в загальну тенденцію зміни даних за період усереднення, тобто занадто великих чи занадто маленьких. Це корисно в тих випадках, коли вхідний сигнал залишається постійним протягом періоду усереднення, а його коливання викликані шумом з нульовим середнім значенням (рис. 3.21, г).
Калібрування і компенсація дрейфу. Значення вхідного вимірювального сигналу часто мають потребу в компенсації дрейфу чи похибок калібрування датчиків (див. рис. 3.21, б, е). Для цієї мети вхідні підсилювачі і АЦП повинні тестуватися і, при необхідності, проходити калібрування за допомогою відомого і точного еталона напруги. У деяких випадках уся процедура калібрування може проводитися автоматично під керуванням програмного забезпечення.
Цифрова фільтрація, що реалізована програмно, має велику гнучкість, оскільки характеристики фільтра можна змінити, просто задавши нові параметри відповідної йому програми. На відміну від аналогових фільтрів, цифрові фільтри добре працюють із тривалими постійними сигналами.
У загальному вигляді цифровий фільтр можна представити як
![]() (3.9)
(3.9)
де h — це інтервал вибірки;
ŷ — відфільтрований вихід;
y — вхід.
Помітимо, що аргумент kh, що no змісту представляє із себе час, можна розглядати і просто як номер (k) у послідовності вхідних значень. Якщо всі коефіцієнти аi дорівнюють нулю, то такий фільтр називається фільтром ковзного середнього з кінцевою імпульсною характеристикою. Це означає, що якщо протягом деякого часу всі послідовні значення уj, крім одного, дорівнюють нулю, то на виході фільтра сигнал буде відмінний від нуля тільки на т часових інтервалах. Якщо деякі або всі коефіцієнти аi не дорівнюють нулю, то такий фільтр називається авторегресивним і має нескінченну імпульсну характеристику. Іншими словами, вхідний сигнал, що відрізняється від нуля тільки на одному часовому інтервалі, викликає появу на виході сигналу, відмінного від нуля протягом нескінченно довгого часу.
Фільтри можуть бути "причинними" і "непричинними". Причинний фільтр обчислює вихідне значення на підставі раніше введених даних (у будь-який момент t0 враховуються вхідні значення тільки для t < t0). Тому усі фільтри реального часу є причинними. Послідовність відфільтрованих значень на виході буде відставати на якийсь час у порівнянні з послідовністю на вході. Якщо дані обробляються в автономному режими, наприклад, при аналізі серії значень уже зібраних вимірів, можна використовувати непричинний фільтр.
Цифрові фільтри низької частоти. Для того, щоб досліджувати повільно змінюваний вхідний сигнал, необхідно видалити з вимірювальних даних випадкові піки і високочастотні наведення, які не містять якої-небудь корисної інформації (див. рис. 3.21, г, д). Це можна зробити за допомогою цифрового фільтра низької частоти.
Структура цифрового фільтра, що ефективно видаляє різкі коливання сигналу й у той же час не впливає на повільні зміни, завжди компромісна, тому що частотні діапазони вихідного сигналу і стороннього сигналів звичайно перетинаються. Як і у аналогових фільтрів, динаміка фільтра високого порядку більш ефективна для видалення небажаних високих частот.
Два найбільш важливі типи ФНЧ — ковзного середнього й експонентного згладжування. ФНЧ, використовувані в промислових КСУ ТП, майже завжди базуються на одному з цих простих фільтрів.
Простий фільтр ковзного середнього виходить, якщо прийняти всі параметри ai у рівнянні (3.9) рівними нулю. Якщо необхідно простого усереднення, то усі вагові коефіцієнти bi, рівні і дають у сумі одиницю. Наприклад, фільтр ковзного середнього з п'ятьма вхідними відліками має такий вигляд:
![]() (3.10)
(3.10)
Якщо операція фільтрації провадиться не в режимі реального часу, то величину ковзного середнього можна підрахувати, використовуючи виміри як до, так і після заданого моменту часу kh. У цьому випадку відфільтроване значення не відстає за часом щодо вхідних значень. Непричинний простий фільтр ковзного середнього по п’ятьох значеннях має вид
![]() (3.11)
(3.11)
Якщо величина на виході являє собою усереднення по останнім п вибірках, то вона зміщається на 1 + п/2 циклів. При великих значеннях п вихідний сигнал стає більш гладким, але при цьому усе більше відстає за часом. Імпульсна характеристика фільтра ковзного середнього кінцева. Для вхідного імпульсу в момент t = 0 вихідний сигнал після моменту t = п стає нульовим.
Ковзне середнє — це простий метод, але він має певні обмеження. При використанні однакових коефіцієнтів фільтр може бути зайво інертним і недостатньо швидко реагувати на реальні зміни у вхідному сигналі. З іншого боку, якщо коефіцієнти різні й убувають для великих значень індексу п, те це утрудняє аналіз властивостей фільтра.
Експонентний фільтр — це авторегресійний фільтр ковзного середнього першого порядку, обумовлений наступним рівнянням
![]() (3.12)
(3.12)
Відфільтроване значення ŷ(kh) обчислюється підсумовуванням попереднього значення відфільтрованого сигналу y[(k - 1)h] і останнього значення y(kh) вимірювального сигналу з ваговими коефіцієнтами. Коефіцієнт а лежить в інтервалі між 0 і 1. Рівняння (4.5) можна переписати у такому вигляді
![]() (3.13)
(3.13)
тобто експонентний фільтр уточнює відфільтроване значення на виході відразу як тільки на вхід надходить нове значення. Це уточнення невелике і стає ще меншим для значень а, близьких до 1; у цьому випадку з'являється ефект інерційності. Зменшення шумових компонентів вихідного сигналу відбувається за рахунок слабкої відповідності з реальними змінами на вході. При а, близькому до нуля, величина по-виправлення росте. Відповідно, фільтрація шуму зменшиться, однак зміни вихідного сигналу будуть відслідковуватися більш точно. При а = 0 сигнал на виході ідентичний сигналу на вході.
Експонентний фільтр можна інтерпретувати як фільтр ковзного середнього, у якого в рівнянні (3.9) нескінченне число членів з коефіцієнтами bj і відсутністю членів з коефіцієнтами ai. Коефіцієнти bj швидко зменшуються для більш старих значень у вхідній послідовності. Цей результат можна одержати, переписавши рівняння (3.12) як
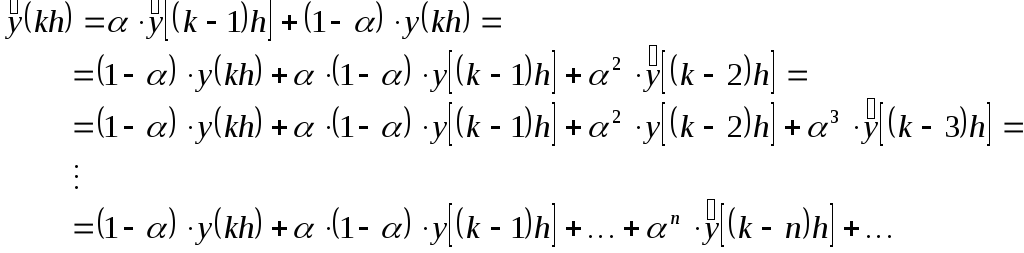 (3.14)
(3.14)
де b0 = 1 - а, b1 = а • (1 - а), b2 = a 2 • (1 - a) і т.д. Тому що 0 < а < 1,то коефіцієнти для більш старих значень убувають по експонентному законі. Наприклад, при а = 0.5 коефіцієнти bj рівні 0.5, 0.25, 0.125, 0.0625,.... а при а = 0.9 — 0.1, 0.09, 0.081, 0,072, ... Іншими словами, якщо а прагне до 1, то фільтр має більш довгу "пам'ять" і більш ефективно згладжує вхідний сигнал. Через експонентне убування значень коефіцієнтів фільтр і одержав свою назву. Експонентний фільтр у дійсності являє собою дискретний варіант аналогового ФНЧ першого порядку з одиничним статичним коефіцієнтом підсилення і передатною функцією
![]() .
(3.15)
.
(3.15)
Постійна часу Т дорівнює RС або L/R у залежності від виду фільтра. Диференціальне рівняння цифрового фільтра
![]() (3.16)
(3.16)
При апроксимації похідної зворотними різницями одержимо
![]() ,
(3.17)
,
(3.17)
що є досить гарним наближенням для малих значень h. Рівняння можна спростити в такий спосіб
 ,
(3.18)
,
(3.18)
що ідентично рівнянню (3.12) при
 (3.19)
(3.19)
чи
![]() .
(3.20)
.
(3.20)
Оскільки було прийнято, що h/T мало, то апроксимація вірна, тільки якщо а наближається до 1. У цьому випадку а можна визначити наступним наближеним виразом
![]() (3.21)
(3.21)
У дійсності точне рішення диференціального рівняння (3.16) — це рівняння (3.12):
![]() (3.22)
(3.22)
для який вираз (3.11) є кращим наближенням при малих значеннях h/T.
Цифрові фільтри низької частоти високих порядків. Аналоговий фільтр другого порядку більш ефективний для придушення високочастотних компонентів, чим фільтр першого порядку. Цифровий фільтр зі структурою, обумовленою рівнянням (3.9), при п = т = 2 відповідає аналоговому фільтру другого порядку. З'єднавши послідовно два експонентних фільтри першого порядку, одержимо фільтр другого порядку з двома однаковими частотами зрізу
![]() ,
(3.23)
,
(3.23)
де y - значення вхідного сигналу, ŷ1 — вихідний сигнал першого фільтра, а ŷ2 — вихідний сигнал другого фільтра. Властивості фільтра визначаються параметром а. Якщо виключити змінну ŷ1(kh), то цифровий фільтр другого порядку можна записати в наступному вигляді
![]() .
(3.24)
.
(3.24)
Фільтр другого порядку ефективніше придушує високі частоти, тому можна вибрати менше значення а. Вихідний сигнал цього фільтра точніше відповідає змінам вхідного сигналу, чим у фільтра першого порядку.
Застосування фільтрів більш високих порядків (рівняння (3.9)) дозволяє ще більше поліпшити якість вихідного сигналу. Платою за це є збільшення складності фільтра, однак вартість обробки даних невелика. Слід зазначити, що якщо в аналогових фільтрах додавання пасивних електронних компонентів до ланцюга фільтра означає додаткові енергетичні втрати в сигналі, то при програмній реалізації цієї проблеми не існує.
Цифрові фільтри високої частоти. У деяких випадках необхідно виділити високочастотні компоненти сигналу, а не плавні зміни. Тому сигнал повинний бути оброблений фільтром високої частоти. Різницева схема — це простий приклад цифрового фільтра високої частоти
![]() .
(3.25)
.
(3.25)
Вихідний сигнал відмінний від нуля тільки тоді, коли є зміни у вхідному сигналі.
Цифровий ФВЧ можна також одержати різницевою апроксимацією аналогового ФВЧ. Відповідне диференціальне рівняння аналогічне рівнянню
![]() ,
(3.26)
,
(3.26)
де y — це вхідний сигнал, а ŷ — вихідний.
Застосувавши до цього рівняння апроксимацію різницями "уперед", одержимо цифровий ФВЧ
![]() , (3.27)
, (3.27)
де а визначається рівнянням (3.11). Дискретне рівняння фільтра можна також вивести аналітично з рівняння (3.26); у результаті одержимо а, виражене рівнянням (3.22), значення якого повинно лежати між 0 і 1. При а = 0 фільтр реалізує чисто різницеву схему. Необхідно ще раз підкреслити, що для застосування різницевої апроксимації і рівняння (3.21) відношення h/T повинне бути досить мало.
Чутливість фільтра на високих частотах визначається вибором значення a. Мале значення а приводить до більшої чутливості, що відповідає більшій частоті зрізу для ФВЧ.
Тепер розглянемо шляхи програмної реалізації математичного забезпечення первинної обробки сигналів датчиків. В промислові програмні системи збору даних і управління (SCADA) зазвичай вже вбудована більшість описаних операцій. Ці програмні механізми оформлені, як правило, у вигляді готових програм – алгоритмічних блоків, які містяться у спеціальній бібліотеці.
Розглянемо приклад реалізації деяких описаних операцій у рамках SCADA системи Trace Mode. Уся обробка інформації (в тому числі і від датчиків) здійснюється в цій системі через такий програмний механізм, як база каналів. Канал – це структура, що складається з набору змінних і процедур, яка має настроювання на зовнішні дані, ідентифікатори і період перерахування цих змінних. На рисунку 3.23 наведене умовне зображення структури такого каналу для введення сигналу датчика.

Рисунок 3.23 – Структура каналу Trace Mode для введення сигналу датчика
У вхідне значення каналу записуються дані, що отримані від датчика по стандартних протоколах Trace Mode, Windows або по протоколах драйверів пристроїв зв’язку з об'єктом (ПЗО).
Канал
має чотири основних значення змінної,
що обробляється в ньому: вхідне, апаратне,
реальне і вихідне. Між цими значеннями
в канал вбудовані процедури первинної
обробки: масштабування, трансляція,
фільтрація та управління. Ці процедури
можна вибирати з бібліотеки (у вигляді
готових програм на мові FBD), або розробляти
самостійно за д опомогою
вбудованих мов програмування (FBD, IL,
C++). Наприклад, такі операції, як
масштабування, зміщення, експонентний
фільтр, придушення піків передбачені
як штатні процедури вхідних каналів.
Але операція обробки “ковзне середнє”
не передбачена в бібліотеці системи,
тому наведемо приклад її реалізації.
Для цього можна використати готовий
алгоритмічний блок “Усереднення”, що
входить до складу вбудованої FBD-мови.
На рисунку 3.24 наведена така реалізації
для процедури “Фільтрація” каналу з
рисунка 3.23.
опомогою
вбудованих мов програмування (FBD, IL,
C++). Наприклад, такі операції, як
масштабування, зміщення, експонентний
фільтр, придушення піків передбачені
як штатні процедури вхідних каналів.
Але операція обробки “ковзне середнє”
не передбачена в бібліотеці системи,
тому наведемо приклад її реалізації.
Для цього можна використати готовий
алгоритмічний блок “Усереднення”, що
входить до складу вбудованої FBD-мови.
На рисунку 3.24 наведена така реалізації
для процедури “Фільтрація” каналу з
рисунка 3.23.
М ожна
також передбачити процедуру трансляції
“Низькочас-тотний фільтр 2-го порядку”
(рисунок 3.25).
ожна
також передбачити процедуру трансляції
“Низькочас-тотний фільтр 2-го порядку”
(рисунок 3.25).
Д ля
обробки сигналу датчика, в якому
корисною складовою є високочастотна,
можна запропонувати як процедуру
трансляції “Високочастотний фільтр”
(рисунок 3.26).
ля
обробки сигналу датчика, в якому
корисною складовою є високочастотна,
можна запропонувати як процедуру
трансляції “Високочастотний фільтр”
(рисунок 3.26).
Зазвичай усі процедури первинної обробки можна реалізувати на будь-якій з універсальних мов програмування. Але це вже виходить за рамки даного навчального посібника.