

5 Організація ксу тп на основі модульних пзо
Даний розділ стосується технічних засобів автоматизації, що призначені для побудови нижнього рівня АСУТП, у тому числі територіально розподіленої. Модульні технічні засоби в ряді випадків можуть розглядатися як альтернатива традиційним ПЗО (наприклад, плат ПЗО) і програмувальним логічним контролерам. Їх назва – модульні – підкреслює їх конструктивну завершеність та жорстко обумовлений перелік виконуваних функцій.
Модульні ПЗО оснащені засобами дистанційного передавання цифрової інформації по стандартним протоколам, що дає змогу легко інтегрувати їх у будь-які контролерні та комп’ютерні структури системи управління (див. нижче).
Для конкретності викладення навчального матеріалу розглянемо тему даного розділу на прикладі модульних пристроїв ПЗО всесвітньо відомої фірми Advantech, які знайшли вже саме широке застосування в нашій країні [ ].
5.1 Модульні пристрої ПЗО серії ADAM-4000: загальний огляд
Пристрої ПЗО серії ADAM являють собою набір інтелектуальних модулів, що забезпечують інтерфейс "датчик-комп'ютер" і містять вбудовані мікроконтролери. Модулі дистанційно керуються за допомогою простого набору команд, видаваних у ASCII форматі і переданих по комунікаційному протоколу RS-485. Модулі забезпечують:
узгодження сигналів;
ізоляцію сигналів;
перетворення діапазонів;
аналого-цифрове (A/D) чи цифро-аналогове (D/A) перетворення;
порівняння даних;
передачу цифрових даних.
Для забезпечення управління реле і ТТЛ - пристроями до складу деяких модулів включені канали цифрового введення/ виведення.
Модулі ADAM не передбачають ніяких установлюваних перемичок або регуляторів. За рахунок простої видачі команд від системного комп'ютера можна установити один з можливих діапазонів входу модуля по напрузі, входу термопари чи входу термоопору (RTD – входу). Усі параметри конфігурації, включаючи адресу введення/ виведення, швидкість передачі, контроль парності, верхні і нижні границі контролю і параметри калібрування можуть бути встановлені дистанційно. Дистанційне конфігурування може бути виконано або з меню сервісного програмного забезпечення, що поставляється, або за допомогою команд калібрування й установки конфігурації. За рахунок можливості збереження параметрів конфігурації і калібрування в енергонезалежному ЕСППЗП, модулі можуть відновлювати свої параметри після збоїв по живленню.
Хоча модулі спроектовані для роботи від нерегульованих стандартних промислових джерел живлення 24В постійного струму, допускається використання будь-яких блоків живлення в діапазоні від +10 до +30В постійного струму. Пульсації напруги живлення повинні обмежуватися максимальним розмахом амплітуди 5В, а миттєва величина пульсації напруги повинна знаходитися в інтервалі між +10 і +30В.
Модулі ADAM можуть бути з’єднаними для обміну інформацією з будь-яким комп'ютером чи терміналом. Модулі працюють з комунікаційним стандартом RS-485, забезпечуючи зв'язок за допомогою команд у текстовому ASCII форматі. Кожному модулю відповідає свій власний набір команд, що включає приблизно десять команд. Кількість команд у модулів введення більше, оскільки туди додатково включені команди контролю. Усі види прийому і передачі інформації модулями виконуються в ASCII форматі, що означає можливість програмування модулів на будь-якій мові високого рівня.
К ожен
модуль міститься у зміцнений пластиковий
корпус, що монтується на DIN – рейку
(рисунок 5.1). Зняття корпуса не передбачено.
Таке конструктивне виконання захищає
модуль від корозії, вологи і вібрації.
Невисокі вимоги по живленню дозволяють
модулям працювати при температурах від
0 до +70ОС
і при вологості від 0 до 95% (при відсутності
конденсації).
ожен
модуль міститься у зміцнений пластиковий
корпус, що монтується на DIN – рейку
(рисунок 5.1). Зняття корпуса не передбачено.
Таке конструктивне виконання захищає
модуль від корозії, вологи і вібрації.
Невисокі вимоги по живленню дозволяють
модулям працювати при температурах від
0 до +70ОС
і при вологості від 0 до 95% (при відсутності
конденсації).
Рисунок 5.1 – Кріплення корпусів модулів ADAM на DIN - рейці
З'єднання в мережу по інтерфейсу RS-485 забезпечує можливість зниження перешкод у сигналах датчиків, оскільки модулі можуть бути встановлені максимально близько до об'єкта. У багатоточкову мережу з інтерфейсом RS-485 може бути включене до 256 модулів ADAM, що реалізується за допомогою повторювача ADAM RS-485, що дозволяє збільшити максимальну відстань передачі до 1200 метрів. Підключення в мережу системного комп'ютера виконується через один з його СОМ - портів за допомогою інтерфейсного перетворювача ADAM RS-232/ RS-485.
Для збільшення пропускної здатності мережі повторювачі ADAM RS-485 використовують логічні сигнали RTS (Request To Send – запит на передачу), що керують напрямком роботи повторювача. При роботі в мережі RS-485 необхідно використовувати тільки два дроти: “DATA+” і “DATA-“. На фізичному рівні мережі для цього використовується недорога екранована кручена пара.
5.2 Модулі аналогового введення
Для перетворень у цифровий формат вихідної напруги датчиків чи струмових сигналів, що надходять з термопар (Т/С) і термоопорів (RTD), модулі використовують інтегруючий АЦП, керований мікроконтролером. На рисунку 5.2 наведена електрична функціональна схема такого модуля типу ADAM-4011. При цьому на вході 16-розрядного АЦП розташований програмувальний підсилювач (PGA) і низькочастотний фільтр (LPF). Коефіцієнт підсилювача змінюється в залежності від обраного користувачем діапазону вхідних сигналів модуля (для їхнього узгодження з вхідним діапазоном напруги АЦП).
Після АЦП, відповідно до заданих параметрів конфігурації, модулі виконують переведення отриманої цифрової інформації або в одиниці фізичної величини, або в додатковий 16-річний код, або у відсотки шкали робочого діапазону (FSR) модуля . При запиті з боку системного комп'ютера модулі пересилають до нього дані по стандартному інтерфейсу RS-485.
Таким чином, усі модулі аналогового введення забезпечують узгодження сигналів, аналого-цифрове перетворення, переключення діапазонів і цифровий зв'язок по інтерфейсу RS-485. Крім того, модулі дозволяють захистити вторинну апаратуру від паразитних контурів заземлення і викидів по живленню за допомогою оптичної ізоляції входу АЦП (photo isolation) і трансформаторної розв'язки до рівня 500В постійного струму.
Більшість модулів аналогового введення також містять два цифрових виходи DO0 і DO1 (2 CH. DIG OUT) і один цифровий вхід

Рисунок 5.2 – Функціональна електрична схема модуля
аналогового введення ADAM-4011
(1 CH. DIG IN). Цифрові виходи виконані у вигляді транзисторних перемикачів з відкритим колектором і можуть керуватися за допомогою системного комп'ютера. Ці виходи можуть керувати електромагнітними реле, що, у свою чергу, можуть включати нагрівачі, насоси й інші електричні пристрої. Стан цифрового входу може бути прочитано системним комп'ютером і використовуватися для оцінки стану вхідного цифрового сигналу. Мається також можливість виконувати підрахунок загального числа низькочастотних вхідних імпульсів на цьому вході за допомогою убудованого лічильника числа спрацьовувань. Максимальне накопичене число спрацьовувань дорівнює 65535. Величина 65535 буде утримуватися в лічильнику навіть у тому випадку, якщо реальне число спрацьовувань перевищило 65535. Лічильник може бути прочитаний чи скинутий у нуль за допомогою системного комп'ютера. Оскільки дані, що містяться в лічильнику спрацьовувань, не зберігаються в ЕСППЗП, то лічильник очищається і встановлюється в нуль щораз при виконанні перезавантаження чи включенні живлення модуля аналогового введення.
Модулі аналогового введення забезпечують також функції контролю верхнього і нижнього граничних рівнів (тривог), наприклад, ADAM-4011 і ADAM-4012. Граничні значення тривог можуть бути завантажені в ЕСППЗП модуля із системного комп'ютера. Функції контролю можуть бути заборонені чи дозволені дистанційно. Коли контроль тривог дозволений, тоді обидва цифрових виходи модуля DO0 і DO1 використовуються для сигналізації верхнього і нижнього граничних станів. По каналу першого цифрового виходу (DO1) видається сигнал тривоги при досягненні вхідним сигналом верхнього граничного рівня (“HI ALARM”), а по каналу нульового цифрового виходу (DO0) видається сигнал тривоги при досягненні вхідним сигналом нижнього граничного рівня (“LO ALARM”). Стани цих цифрових виходів можуть бути в будь-який момент прочитані системним комп'ютером.
Кожне аналого-цифрове перетворення сигналу буде супроводжуватися його порівнянням зі значеннями верхнього і нижнього граничних рівнів. Якщо вхідний сигнал досягне одного з цих рівнів, то буде установлений відповідний цифровий сигнал сигналізації тривоги. Мається два режими видачі тривог: миттєвий і режим заскочки. Якщо встановлений режим заскочки, то стан тривоги буде утримуватися навіть після повернення вхідного сигналу в припустимі границі. Скидання сигналу тривоги може бути виконаний за допомогою команди «Скидання контролю» (“Clear Alarm”), видаваної системним комп'ютером. Сигнал тривоги, видаваний у режимі заскочки, скидається модулем самостійно, якщо вхідний сигнал досягне протилежного граничного рівня. Якщо модуль працює в миттєвому режимі контролю, то стан тривоги скидається модулем самостійно при поверненні вхідного сигналу в границі норми.
Процес аналого-цифрового перетворення керується мікроконтролером модуля, що забезпечує виконання програмних процедур калібрування. При вмиканні чи перезавантаженні модуля автоматично виконується два види калібрування: автокалібрування нуля й автокалібрування діапазону. Звичайне (не автоматичне) калібрування використовується для настроювання діапазону вхідного сигналу відповідно до каліброваних параметрів, що задаються користувачем.
5.3 Модулі аналогового виведення
Модулі аналогового виведення приймають по лінії інтерфейсу RS-485 цифрові дані від системного комп'ютера. У залежності від конфігурації модуля, ці дані можуть передаватися в технічних одиницях, 16-річному додатковому коді чи у відсотках шкали діапазону (FSR). Потім, за допомогою керованого мікроконтролером ЦАП (D/A CONVERTER), модулі перетворять цифрові дані у вихідні аналогові сигнали.
За допомогою вбудованого в модуль АЦП (ADC), що забезпечує незалежний контроль вихідного сигналу модуля (OUTPUT MONITOR), можна одержувати дійсне значення цього сигналу (зворотне читання).
Також, за допомогою програми конфігурування модуля, можна задати швидкість наростання фронту вихідного сигналу і значення початкових (стартових) струмів. Крім того, модуль аналогового виведення дозволяє забезпечити одноканальний аналоговий вихід, що знаходиться в заданому діапазоні напруги чи струму.
Модулі дозволяють захистити вторинну апаратуру від паразитних контурів заземлення і викидів по живленню за допомогою оптичної ізоляції виходу ЦАП і трансформаторної розв'язки до рівня 500В постійного струму (PROTECTED OUTPUT STAGE).
На рисунку 5.3 приведена функціональна електрична схема модуля аналогового виведення ADAM-4021.
Параметри його виходу такі:
напруга від 0 до 10В при швидкості наростання фронту сигналу напруги від 0,0625 до 64 В/ с;
струм від 0 до 20 мА чи від 4 до 20 мА при швидкості наростання фронту сигналу струму від 0,125 до 128 мА/ с.

Рисунок 5.3 – Схема електрична функціональна модуля аналогового
виведення ADAM-4021
5.4 Модулі цифрового введення/ виведення
Модулі цифрового введення/ виведення мають кілька каналів цифрового введення і кілька каналів цифрового виведення. Команди, що надходять від системного комп'ютера, встановлюють канали в логічні рівні, що відповідають поточній конфігурації модулів цифрового введення/ виведення на електромагнітних реле (SSR). Об'єднання модулів із електромагнітними реле дозволяє їм здійснювати керування чи моніторинг інтерфейсів ліній високої напруги постійного чи змінного струму за допомогою логічних ТТЛ - сигналів.
На рисунку 5.4 приведена електрична функціональна схема модуля цифрового введення/ виведення ADAM-4050. Цей модуль має 7 вхідних каналів і 8 вихідних каналів.
Цифрове виведення характеризується наступними параметрами: схема включення транзистора – відкритий колектор, максимальний струм навантаження – 30 мА, максимальна потужність, що розсіюється, – 399мВт.
Цифрове введення характеризується наступними параметрами: логічний «нуль» відповідає напрузі до плюс 1В, а логічна «одиниця» – напрузі в межах від плюс 3,5В до плюс 30В; струм розпізнавання – 0,5 мА через резистор 10 кОм при логічній «одиниці», рівній 5В.
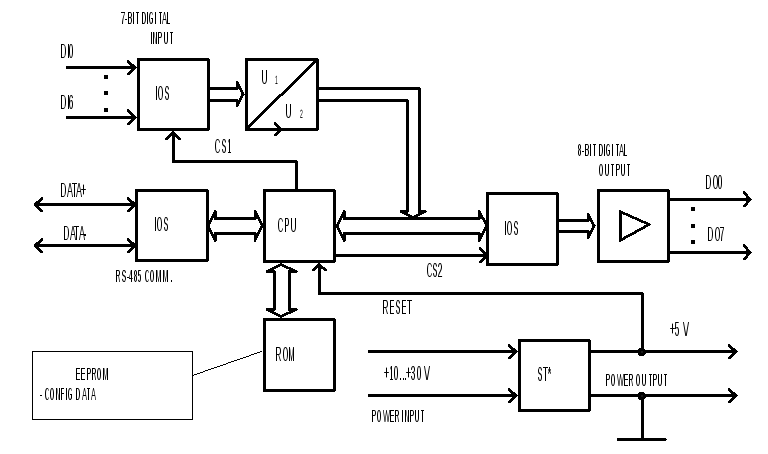
Рисунок 5.4 – Схема електрична функціональна модуля
цифрового введення/ виведення ADAM-4050
5.5 Модуль релейного виведення (комутації)
Модуль релейного виведення являє собою здешевлену альтернативу модулям із монолітними електронним реле (solid-state relay). Модулі релейного виведення, як правило, включають чотири релейних канали: два канали типу А та два канали типу С (двопозиційне і трипозиційне виведення).
П рикладом
такого модуля може служити ADAM-4060. На
рисунку 5.5 приведена його електрична
функціональна схема.
рикладом
такого модуля може служити ADAM-4060. На
рисунку 5.5 приведена його електрична
функціональна схема.
Рисунок 5.5 – Схема електрична функціональна модуля
релейного виведення ADAM-4060
Характеристики робочого ланцюга для каналів А та С цього модуля такі: для змінного струму – 0,6 А при напрузі 125 В чи 0,3 А при напрузі 250 В; для постійного струму – 2 А при напрузі 30 В чи 0,6 А при напрузі 110 В.
Часові характеристики модуля: типовий час вмикання вихідних реле – 3 мс; типовий час вимикання вихідних реле – 1 мс; загальний час переключення вихідних реле – 10 мс.
5.6 Організація локальної мережі. Модулі комунікаційного зв'язку
Загальна конфігурація локальної мережі з модулів ADAM на основі протоколу RS-485 приведена на рисунку 5.6.

Рисунок 6 – Загальна конфігурація локальної мережі
на основі протоколу RS-485
Комунікаційний протокол RS-232, затверджений у EIA (Electronic Industries Association), у вигляді протоколу RS-485 був спеціально пристосований для задоволення потреб промислової автоматики – для забезпечення передачі інформації на великі відстані з прийнятною пропускною здатністю, мінімальним об'ємом провідних з'єднань і простою системою підключення вузлів. Інтерфейс RS-485 використовує симетричний набір із кручених провідних ліній, однак, в наслідок високих рівнів шумів у промислових умовах більш кращим є застосування екранованих кручених пар.
Стандарт RS-485 використовує напівдуплексний тип зв'язку. Це означає, що для передачі і прийому інформації необхідно тільки дві провідні лінії. При цьому для управління напрямком передачі даних, як правило, використовуються сигнали квитирування встановлення зв'язку (такі як RTS - Request To Send). Але спеціальні мікросхеми, що входять до складу модулів ADAM-4510 (повторювач сигналу інтерфейсу) і ADAM-4520 (перетворювач інтерфейсів), автоматично розпізнають і самостійно переключають напрямок передачі. Тому при створенні мережі на основі модулів ADAM немає необхідності у використанні сигналів квитирування, тобто з’являється можливість організації локальної мережі на фізичному рівні тільки за допомогою двох провідників. Процес керування передачею по протоколу RS-485 цілком прозорий для користувача.
Для роботи за двопровідною технологією необхідно в повному об'ємі використовувати можливості модулів ADAM-4510 (повторювач сигналу інтерфейсу) і ADAM-4520 (перетворювач інтерфейсів).
У тому випадку, якщо системний комп'ютер працює з інтерфейсом RS-485, то він може бути безпосередньо підключений до мережі із модулями ADAM. Однак, послідовні порти більшості обчислювальних систем промислового призначення побудовані на протоколі RS-232C. Незважаючи на широку поширеність цього інтерфейсу, для нього характерні істотні обмеження по швидкості передачі даних, довжині лінії зв'язку і можливості створення багатоточкових систем передачі інформації. Описаний вище інтерфейс RS-485 дозволяє перебороти зазначені обмеження за рахунок використання симетричної лінії зв'язку і диференціальної схеми включення прийомопередавачів.
Модуль ADAM-4520 забезпечує можливість використання переваг стандарту RS-485 у системах послідовної передачі інформації. Він виконує перетворення сигналів комунікаційного комп'ютерного порту RS-232С в сигнали стандарту RS-485. Для захисту системного комп'ютера від статичних розрядів чи помилок підключення перетворювач використовує оптичну і трансформаторну лінії розв'язки. Швидкості передачі даних можуть змінюватися в діапазоні від 1200 до 38400 біт/сек.
На рисунку 5.7 наведена електрична функціональна схема перетворювача інтерфейсів ADAM-4520.
DIP-перемички SW1 (Data Format Setting) та SW2 (Baud Rate Setting), які розташовані в перетворювачі, визначають формат переданих даних (число біт) і швидкість передачі даних в мережі модулів ADAM. Параметри інших модулів у мережі встановлюються за допомогою програмно видаваних команд. Параметри послідовного порту системного комп'ютера і параметри, задані програмно, повинні відповідати установкам перетворювача.
Перемички SW1 визначають формат переданих даних. Передача даних може провадитися у форматі 9, 10, 11 чи 12 біт. У поставному варіанті установлений формат 10 біт: один стартовий біт, вісім бітів даних, без біта парності й один стоп - біт. У таблиці 5.1 наведені варіанти установки перемичок SW1 для забезпечення різних форматів даних.

Рисунок 5.7 – Електрична функціональна схема модуля ADAM-4520
Таблиця 5.1 – Варіанти установки перемичок SW1 модуля ADAM-4520
|
Формат даних |
Стан перемичок 1 і 2 | |
|
1 |
2 | |
|
9 біт |
розімкнена |
розімкнена |
|
10 біт * |
замкнена |
розімкнена |
|
11 біт |
розімкнена |
замкнена |
|
12 біт |
замкнена |
замкнена |
Примітка. * - формат, що встановлюється виробником по
замовчуванню.
У випадку, коли перетворювач інтерфейсів використовується в комбінації з іншими модулями ADAM, то не провадиться зміна установлених за замовчуванням параметрів, оскільки всі модулі ADAM мають фіксований формат передачі - 10 біт.
Додаткові формати (9, 11, 12 біт) передбачені для пристроїв, відмінних від ADAM, які мають відмінні від них формати передачі даних. При зміні формату даних треба переконатися, що у всіх включених у мережу модулях зроблені відповідні зміни.
Перемички SW2 установлюють швидкість передачі даних. Швидкість передачі може установлюватися від 1200 біт/с до 115,2 Кбіт/с. За замовчуванням установлена швидкість 9600 біт/с. При зміні швидкості передачі треба переконатися, що у всіх включених у мережу модулях зроблені відповідні зміни швидкості передачі.
Розглянемо такий приклад. При забезпеченні зв'язку з пристроями, що використовують стартовий біт, вісім біт даних, один стоп - біт і контроль парності, необхідно встановити модуль на роботу з форматом 1+8+1 + 1 = 11 біт.
Нижче в таблиці 5.2 наведені варіанти установки перемичок SW2 для модуля ADAM-4520 для забезпечення різних швидкостей передачі даних, а також для переходу на інтерфейс RS-422 (З – замкнена, Р – розімкнена).
Таблиця 5.2 – Варіанти установки перемичок SW2 модуля ADAM-4520
|
Швидкість передачі, Бод |
Стан перемичок 1-10 | |||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 | |
|
RTS control |
З |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
|
1200 |
Р |
З |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
|
2400 |
Р |
Р |
З |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
|
4800 |
Р |
Р |
Р |
З |
Р |
Р |
Р |
Р |
Р |
Р |
|
9600* |
Р |
Р |
Р |
Р |
З |
Р |
Р |
Р |
Р |
Р |
|
19200 |
Р |
Р |
Р |
Р |
Р |
З |
Р |
Р |
Р |
Р |
|
38400 |
Р |
Р |
Р |
Р |
Р |
Р |
З |
Р |
Р |
Р |
|
57600 |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
З |
Р |
Р |
|
115200 |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
З |
Р |
|
RS-422 |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
З |
Примітки:
“*” - встановлюється виробником за замовчуванням.
“Р” – розімкнений стан перемички.
“З” – замкнений стан перемички.
Для збільшення довжини лінії зв'язку, на основі якої організується локальна мережа модулів ADAM-4000, а також для включення до складу мережі більше 32 пристроїв, використовується повторювач мережі ADAM-4510, що підсилює сигнали інтерфейсу RS-485 (рисунок 5.8).
Використання модуля ADAM 4510 може також підвищити працездатність мережі. За допомогою повторювачів загальне число модулів мережі може бути збільшене до 256, тому що кожен повторювач забезпечує можливість організації чергового сегмента мережі довжиною до 1200 м, що містить до 32 модулів серії ADAM-4000. Швидкість передачі даних може змінюватися від 1200 до 115,2 Кбіт/ с.
Нижче в таблицях 5.3 і 5.4 наведені варіанти установки перемичок SW1 і SW2 модулів для забезпечення потрібного формату (Data Format Setting) та швидкості передачі даних (Baud Rate Setting). Для мережі на основі тільки модулів ADAM справедливі всі зауваження щодо швидкості і формату, які описані вище для модуля ADAM-4520.

Рисунок 5.8 –Електрична функціональна схема модуля ADAM-4510
Таблиця 5.3 – Варіанти установки перемичок SW1 модуля ADAM-4510
|
Формат даних |
Стан перемичок 1 і 2 | |
|
1 |
2 | |
|
9 біт |
Розімкнена |
Розімкнена |
|
10 біт * |
Замкнена |
Розімкнена |
|
11 біт |
Розімкнена |
Замкнена |
|
12 біт |
замкнена |
Замкнена |
Примітка. “*” - формат, що встановлюється виробником по
замовчуванню.
Таблиця 5.4 – Варіанти установки перемичок SW2 модуля ADAM-4510
|
Швидкість передачі, Бод |
Стан перемичок 1-9 | ||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 | |
|
RTS control |
З |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
|
1200 |
Р |
З |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
|
2400 |
Р |
Р |
З |
Р |
Р |
Р |
Р |
Р |
Р |
|
4800 |
Р |
Р |
Р |
З |
Р |
Р |
Р |
Р |
Р |
|
9600* |
Р |
Р |
Р |
Р |
З |
Р |
Р |
Р |
Р |
|
19200 |
Р |
Р |
Р |
Р |
Р |
З |
Р |
Р |
Р |
|
38400 |
Р |
Р |
Р |
Р |
Р |
Р |
З |
Р |
Р |
|
57600 |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
З |
Р |
|
115200 |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
З |
|
RS-422 |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
Р |
Примітки:
“*” - встановлюється виробником за замовчуванням.
“Р” – розімкнений стан перемички.
“З” – замкнений стан перемички.
5.7 Спеціальні типи модулів серії ADAM-4000
Модулі ADAM-4017 і ADAM-4018 є 8-канальними пристроями аналогового введення, оснащеними 16-розрядним АЦП. Діапазон і тип вхідних аналогових сигналів встановлюється програмним способом для всіх каналів. На рисунку 5.9 наведена електрична функціональна схема модуля ADAM-4018.
Модулі зазначених типів представляють найбільш економічне рішення для створення територіально розподілених АСУТП. Кожен модуль має гальванічну розв'язку між підсистемою аналогового введення й убудованим мікропроцесором з напругою ізоляції 3000 В постійного струму, що значно знижує імовірність ушкодження пристроїв і головної обчислювальної системи перешкодами і наведеннями підвищеної інтенсивності, характерними для промислових умов експлуатації.
Модуль ADAM-4017 має такі технічні характеристики:
шість диференціальних каналів і два однополярних канали;
діапазон вхідної напруги у мілівольтах: ±150 мВ і ±500 мВ;
діапазон вхідної напруги у вольтах: ±1В, ±5В та ±10В;
діапазон вхідних постійних струмів: ±20 мА;
модуль передає дані в системний комп'ютер у фізичних величинах (мВ, В та мА).
дискретність вибірки по входу: 10 відліків/ с;
робоча смуга частот: 4 Гц;
точність: не нижче ±0,05%.

Рисунок 5.9 – Електрична функціональна схема модуля ADAM-4017
Цифровий 4,5-дюймовий світлодіодний індикатор, розташований на задній стороні модулів ADAM-4011D і ADAM-4014D, дозволяє виконувати моніторинг робочого процесу безпосередньо на об'єкті керування. Модулі можуть виконувати відображення інформації в широкому діапазоні форматів даних і забезпечувати контроль досягнення верхнього/ нижнього рівнів. Модулі легко встановлюються, зручні в експлуатації і дозволяють виконувати безпосередню обробку даних прямо на об'єкту керування. Вони є ідеальним засобом моніторингу найбільш критичних процесів.
У модулі убудовані ізольовані джерела живлення. Вони дозволяють працювати з 2-х і 3-х провідними передавачами сигналів без додаткового зовнішнього джерела живлення. Модулі мають індивідуальні контури живлення по кожному каналу, що спрощує процес їхнього підключення до датчика при одночасному забезпеченні ізоляції між ланцюгами підключених джерел сигналів.
Модулі можуть виконувати перетворення лінійного входу в одиниці фізичної величини і відображати її значення на убудованому світлодіодному індикаторі (безпосереднє відображення).
Якщо вхід є нелінійним, то модулі спочатку пересилають дані в системний комп'ютер для перетворення вхідної інформації в значення фізичної величини. Потім комп'ютер пересилає готові дані назад у модулі для їхнього відображення на світлодіодному індикаторі (дистанційне відображення).
Розглянемо такий приклад. При вимірі тиску датчик має на своєму виході напруги, що знаходяться в діапазоні від 1 В до 5В. При цьому дійсні значення тиску знаходяться в діапазоні від 0 Н/ м2 до 100 Н м2. Співвідношення між вихідною напругою датчика і вхідним значенням тиску є лінійним. Тоді за допомогою функцій модулів ADAM-4011D чи ADAM-4014D можна перетворити отримане значення коду вхідної напруги датчика у відповідне значення тиску і відобразити його на індикаторі (без участі системного комп'ютера).
На рисунку 5.10 наведена електрична функціональна схема модуля ADAM-4014D.

Рисунок 5.10 - Електрична функціональна схема модуля ADAM-4014D
Модулі також містять два цифрових виходи й один цифровий вхід. Виходи виконані у вигляді транзисторних перемикачів з відкритим колектором і можуть керуватися із системного комп'ютера. З їхньою допомогою можна керувати електромагнітними реле, що у свою чергу можуть керувати нагрівачами, насосами й іншими електричними приладами.
Стан цифрового входу може бути прочитано системним комп'ютером для оцінки стану цього віддаленого цифрового порту.
До цифрового входу може бути підключений убудований лічильник спрацьовувань (подій), що буде підраховувати загальне число зовнішніх низькочастотних імпульсів на цьому вході. Максимальне число лічильника, що накопичується, дорівнює 65535. При перевищенні кількості вхідних імпульсів цього числа в лічильнику як і раніше буде зберігатися число 65535. Вміст лічильника може бути прочитано системним комп'ютером чи скинуто їм у нуль. Лічильник скидається в нуль також при виконанні модулем перезавантаження чи включенні живлення.
Для контролю верхнього і нижнього граничних значень вхідної величини модулі переводяться в цей режим програмним шляхом (із системного комп'ютера). Алгоритм роботи модулів у цьому режимі описаний вище (при описі модулів аналогового введення).
Цей модуль має такі технічні характеристики:
напруга входу в мілівольтах: ±150 мВ і ± 500 мВ;
напруга входу у вольтах: ±1 В, ±5 В та ± 10 В;
вхідний струм: ± 20 мА;
модуль має два цифрових виходи й один цифровий вхід;
у залежності від обраної конфігурації він може передавати дані в системний комп'ютер в одному з наступних форматів: в одиницях вхідного електричного сигналу (мВ, В чи мА), у відсотках шкали робочого діапазону, у додатковому 16-річному коді.
Модуль ADAM-4018M являє собою 16-бітовий 8-канальний реєстратор аналогових даних із програмованими вхідними діапазонами по всіх каналах. Вісім вхідних каналів утворюються шістьма диференціальними каналами і двома однополярними каналами. Убудований флеш-ПЗП об'ємом 128 К забезпечує можливість запису і збереження більш ніж 30000 відліків вхідних аналогових сигналів. Інтервал між записом сусідніх за часом вибірок може складати від 2 секунд до 18 годин. Частота однієї вибірки складає 10 відліків за секунду (загальна по усім восьми каналах). Тривалість реєстрації може бути від 330 хвилин до 20 років.
На рисунку 5.11 наведена електрична функціональна схема модуля.
Модуль може працювати з різними типами вхідних аналогових сигналів, такими як сигнали термопар (типи термопар – J, K, T, E, R, S), сигнали в мілівольтах (±15, ±50, ±100, ±500) і вольтах (±1 і ±2,5), струмові сигнали в міліамперах (±20). Модуль працює в трьох режимах: стандартний запис (максимальне число реєстрованих відліків дорівнює 38000), запис за умовою (максимальне число реєстрованих відліків дорівнює 16300) і змішаний запис (максимальне число реєстровних відліків дорівнює 16300 при стандартному записі і 9300 при записі за умовою).
Оптично ізольовані входи забезпечують розв'язку між модулем і аналоговим входом від напруги 500 В постійного струму.

Рисунок 5.11 – Електрична функціональна схема модуля ADAM-4018M
На рисунку 5.12 наведена структура автоматизованої інформаційної системи газового господарства регіону АІС “ГАЗ”, що побудована на основі таких модулів аналогового введення сигналів датчиків-перетворювачів.
Ця структура є централізованою з радіальними лініями зв'язку між центральною ПЕОМ і розподіленими пристроями зв'язку з об'єктом (ПЗО). Кожен газорозподільний об'єкт (ГРО) і газорозподільний пункт (ГРП) обладнаний необхідним набором датчиків і 8-канальним модулем введення аналогових сигналів датчиків ADAM-4018M.
Введення/виведення інформації в/з ПЕОМ реалізується через послідовний стандартний інтерфейс RS-232, а передача інформації між центральним пунктом і об'єктами контролю — по магістралі RS-485.

Рисунок 5.12 – Структура АІС “ГАЗ” на основі модулів ADAM-4018М
Для перетворення і посилення сигналів ліній зв'язку система обладнана перетворювачем інтерфейсів ADAM-4520 і повторювачами лінії RS-485 ADAM-4510S (по одному на кожен напрямок зв'язку), встановленими в центральному диспетчерському пункті. Максимальне число повторювачів, що підключаються до одного перетворювача інтерфейсів, дорівнює 32.
Така структура АІС дозволяє легко здійснювати її розвиток в плані нарощування числа ГРО чи ГРП шляхом підключення додаткових повторювачів сигналів передачі та модулів введення сигналів датчиків-перетворювачів.
Роздивимося наступний спеціальний модуль серії ADAM. Модуль ADAM-4016 є пристроєм введення сигналів від тензодатчиків з гальванічною ізоляцією (3000 В), що призначено для проведення вимірів точкового навантаження і зусилля. Модуль може функціонувати в режимі виміру струму чи напруги. До складу модуля входять два канали дискретного виведення для реалізації функцій локального оперативного керування, а також два канали дискретного виведення загального призначення для індивідуального застосування. Це забезпечує можливість використання модуля як засобу двопозиційного керування комутаційним устаткуванням без утручання системного комп'ютера.
Модулі ADAM-4080 (без світлодіодної індикації) і ADAM-4080D (з світлодіодною індикацією) є гальванічно ізольованими пристроями введення частотного/ імпульсного сигналів, що оснащені двома 32-розрядними лічильними каналами і програмувальним таймером для виміру частоти.
П'ятизначна панель індикації модуля ADAM-4080D дозволяє безпосередньо на об'єкті контролювати показання одного з лічильників в одиницях частоти, лічильних одиницях чи оборотах за хвилину. Крім цього панель відображає контрольні повідомлення, видавані у випадку перевищення вмістом лічильника його встановлених меж (безпосереднє відображення).
Іншою можливістю є відображення даних, переданих системним комп'ютером. Спочатку модуль пересилає дані в системний комп'ютер для перетворення чи перерахування. Після необхідної обробки комп'ютер пересилає дані назад у модуль, що відображає їх на своєму індикаторі (дистанційне відображення).
На рисунку 5.13 наведена функціональна електрична схема модуля ADAM-4080D.
Модуль ADAM-4080D має окремі вхідні контакти для забезпечення оптоізольованого введення, а також неізольований вхід, що спрощує процес підключення модуля. Оптоізольований вхід забезпечує ізоляцію від напруги до 500 В постійного струму і захист від паразитних контурів заземлення. Після підключення модуля необхідно програмним шляхом установити, який із двох варіантів входу використовується (ізольований чи неізольований).
До складу модуля включений програмувальний цифровий фільтр (PROGRAMMABLE DIGITAL NOISE FILTER), що дозволяє знизити рівень шумів у вхідних ланцюгах. Для забезпечення стабільності показань, що знімаються, можна також установити обмеження на вхідний сигнал (PROGRAMMABLE THRESHOLD VOLTAGE). Наприклад, мінімальну тривалість сигналу високого рівня і мінімальну тривалість сигналу низького рівня. Це дозволить виключити вплив випадкових викидів сигналу на показання.
Якщо обрана робота модуля з неізольованим входом, то можна установити мінімальні величини високого і низького рівнів розпізнавання вхідних сигналів. У цьому випадку знижується шум у вхідних ланцюгах модуля і забезпечується стабільність показань.

Рисунок 5.13 – Функціональна електрична схема модуля ADAM-4080D
Крім входів лічильників, кожен вхідний канал має керуючий вхід (“GATE”), необхідний для прийому зовнішнього сигналу керування. Сигнал керування (високий чи низький) може запускати чи зупиняти лічильник. Режим запуску може бути низьким, високим чи забороненим (низький означає, що рахунок починається по приходу керуючого сигналу низького рівня і завершується при переході сигналу у високий рівень).
Лічильник 0 (СТ0) модуля ADAM-4080D надає можливість роботи з функціями контролю тривог по верхньому і нижньому рівнях. Граничні значення верхнього і нижнього рівнів тривог можуть бути завантажені в ЕСППЗП модуля із системного комп'ютера.
Функція контролю тривог може бути заборонена чи дозволена дистанційно. Коли контроль дозволений, обидва цифрові виходи модуля використовуються для сигналізації станів верхнього і нижнього граничних значень. По каналу першого цифрового виходу (ALARM 0) видається сигнал тривоги при перевищенні верхнього граничного значення, а по каналу другого цифрового виходу (ALARM 1) видається сигнал тривоги при досягненні нижнього граничного значення. Стани обох цифрових виходів можуть у будь-який момент бути прочитані системним комп'ютером.
Кожна зміна вмісту лічильника сигналу буде супроводжуватися його порівнянням із установленими граничними значеннями. Алгоритм установки сигналів тривог і їхнього скидання аналогічний тому, що описано вище для модулів аналогового введення.
Технічні характеристики модуля ADAM-4080D такі:
число каналів – два 32-розрядних лічильних (лічильники 0 і лічильник 1);
мінімальна частота вхідного сигналу – 5 Гц;
максимальна частота вхідного сигналу – 50 Гц;
убудовані програмувальні інтервали рахунка: 1,0 с і 0,1 с;
тип входів – ізольований і неізольований;
вхідні рівні сигналу ізольованого входу: логічний «нуль» від 0 до плюс 1 В, логічна «одиниця» від плюс 3,5 В до плюс 30 В;
вхідні рівні сигналу неізольованого входу (програмувальний поріг): логічний «нуль» від 0 до плюс 5В (за замовчуванням плюс 0,8 В), логічна «одиниця» від 0 до плюс 5 В (за замовчуванням плюс 2,5 В);
тривалість вхідного імпульсу не менш 10 мкс;
програмування фільтра шуму в межах від 2 мкс до 65 мс.
5.8 Особливості електричної зборки мережі та її програмної
конфігурації
Перед установкою модуля в існуючу мережу RS-485 потрібно виконати його конфігурацію. На рисунку 5.14 наведена базова схема, підключення модуля при його конфігуруванні.
Для конфігурування модуля необхідно наступне устаткування: модуль перетворення інтерфейсу, персональний комп'ютер з портом RS-232 (швидкість передачі встановлена на 9600) і програмне забезпечення модулів ADAM.
Самим доступним способом конфігурування модулів ADAM є конфігурування за допомогою програмного забезпечення, що поставляється виробником у вигляді сервісного додатка.
Також можна виконувати конфігурування шляхом безпосередньої видачі керуючих команд із програми емуляції термінала, що теж входить до складу програмного забезпечення, що поставляється виробником.

1 - перетворювач інтерфейсу; 2 - модуль, що конфігурується;
3 - системний комп'ютер; 4 - джерело живлення;
( ) - номер контакту на розніманні EIA-232-D (RS-232).
Рисунок 5.14 – Схема конфігурації модулів ADAM
Розглянемо приклад такої конфігурації модуля ADAM-4011. Після вмикання живлення на всі підключені пристрої запускається програма емуляції термінала. Через неї вводиться команда: $012 (сr), яка виконує запит параметрів конфігурації модуля з адресою 01 (встановлена попередньо).
У відповідь програма емуляції отримує від модуля цифрову послідовність, наприклад !01050600. Вона означає, що модуль з адресою 01 має таку конфігурацію: вхідний діапазон сигналу ±2,5 В, швидкість передачі 9600 бод, час перетворення 50 мс (60 Гц), передбачена передача даних у фізичних (технічних) одиницях, контроль чи формування контрольної суми не виконуються.
Щоб змінити параметри конфігурації модуля вводимо наступну команду: %01070F0600(cr), де % = команда зміни конфігурації, 01 = встановити модулю з адресою 01 нову адресу; 07 = нова 16-річна адреса 07; 0F = установити вхідний діапазон для термопар типу К; 06 = установити швидкість передачі 9600; 00 = установити час перетворення 50мс (60 Гц); заборонити контрольну суму та встановити фізичні одиниці як формат передачі даних. Повний опис синтаксису таких команд конфігурації можна знайти в керівництві користувача, що поставляється разом з модулем.
Після одержання команди конфігурації, модуль поверне свою нову адресу: !07 (сг).
Тепер для видачі на модуль нової команди необхідно витримати паузу до 7 секунд, оскільки протягом цього часу модуль буде виконувати зміну параметрів своєї конфігурації.
З метою збереження параметрів конфігурації і каліброваних констант, модулі ADAM укомплектовані мікросхемами ЕСППЗП. Використання ЕСППЗП дозволяє обійтися без стандартного набору перемичок і регуляторів, що задають швидкість передачі, вхідні/вихідні робочі діапазони й інші параметри. Усі модулі ADAM можуть конфігуруватися дистанційно через їхні комунікаційні порти RS-485.
Оскільки конфігурація виконується програмним шляхом, то неможливо візуально визначити встановлену для модуля швидкість передачі, адресу й інші параметри. Також неможливо встановити зв'язок з модулем, адреса і робоча швидкість передачі якого невідомі. Для рішення цієї проблеми, кожен модуль має вхідний контакт, позначений міткою “INIT*”. При перезавантаженні модуля, у якого контакт “INIT*” з'єднаний з контактом модуля “GND”, усі параметри конфігурації модуля встановлюються в чітко визначений стан. Цей стан називається станом INIT*: швидкість передачі 9600 бод; адреса модуля 00h; контрольна сума: заборонена.
Установка модуля в стан INIT* не викликає зміну яких-небудь параметрів, зафіксованих у ЕСППЗП модуля. У тому випадку, коли модуль, встановлений у стан INIT* шляхом замикання контактів “INIT*” і “GND”, усі параметри конфігурації можуть бути встановлені знову і модуль буде адекватно реагувати на всі подавані команди.
Параметри швидкість передачі і контрольна сума мають деякі загальні особливості: вони повинні бути однакові для всіх модулів і системного комп'ютера, їхнє значення може бути змінене тільки шляхом установлення модуля в стан INIT*, активізація змін виконується тільки після перезавантаження модуля.
Д ля
зміни швидкості передачі даних чи
статусу контрольної суми треба зробити
таку послідовність дій. Подати живлення
на усі компоненти схеми, за винятком
модуля ADAM. Подати живлення на модуль
ADAM при з’єднаних контактах “IN IT*” і
“GND” (рис 5.15). Витримати паузу, щонайменше
в 7 секунд, для виконання автоматичного
калібрування й установки діапазону.
Установити через програмну емуляцію
термінала нову конфігурацію параметра
статусу контрольної суми і/чи
швидкості передачі. Відключити
живлення від модуля ADAM. Зняти землю
з контакту INIT* і подати на модуль живлення.
Витримати паузу, щонайменше в 7
секунд,
для виконання автоматичного калібрування
й установки діапазону. Перевірити
зроблені установки (якщо швидкість
передачі була змінена, то відповідна
зміна повинна бути виконана і для
системного комп'ютера).
ля
зміни швидкості передачі даних чи
статусу контрольної суми треба зробити
таку послідовність дій. Подати живлення
на усі компоненти схеми, за винятком
модуля ADAM. Подати живлення на модуль
ADAM при з’єднаних контактах “IN IT*” і
“GND” (рис 5.15). Витримати паузу, щонайменше
в 7 секунд, для виконання автоматичного
калібрування й установки діапазону.
Установити через програмну емуляцію
термінала нову конфігурацію параметра
статусу контрольної суми і/чи
швидкості передачі. Відключити
живлення від модуля ADAM. Зняти землю
з контакту INIT* і подати на модуль живлення.
Витримати паузу, щонайменше в 7
секунд,
для виконання автоматичного калібрування
й установки діапазону. Перевірити
зроблені установки (якщо швидкість
передачі була змінена, то відповідна
зміна повинна бути виконана і для
системного комп'ютера).
Н а
рисунку 5.16 показаний приклад електричного
багатомодульного з'єднання модулів
ADAM в мережу.
а
рисунку 5.16 показаний приклад електричного
багатомодульного з'єднання модулів
ADAM в мережу.
1 - опір, що узгоджує; 2 – проводи живлення (B = чорний, R = червоний, G = зелений і Y = жовтий); 3 - порт RS-485 системного комп'ютера;
4 - джерело живлення; 5 - місцеве джерело живлення.
Рисунок 5.16 – Приклад електричного багатомодульного з'єднання
Тепер роздивимося приклади підключення різних типів зовнішніх аналогових і цифрових пристроїв (датчиків, перетворювачів, реле тощо) до модулів введення/ виведення серії ADAM.
Н а
рисунку 5.17 наведений приклад підключення
джерела напруги (датчик) до модуля
аналогового введення.
а
рисунку 5.17 наведений приклад підключення
джерела напруги (датчик) до модуля
аналогового введення.
На рисунку 5.18 наведена схема підключення джерела струму (датчика) з уніфікованих вихідним сигналом 4-20 мА до входу модуля аналогового введення. При цьому застосовується узгоджувальний резистор номіналом 125 Ом з класом точності 0,1 %.
Д ля
підключення термопар до модулів
аналогового введення, що мають відповідні
вхідні канали, треба слідкувати за
правильністю підключення полярності
виводів цих термопар до вхідних клем
модуля. На клемних панелях модулів є
відповідні написи: клема “Т/С+” – для
підключення позитивного потенціалу
термопари, клема “Т/С-“ – для підключення
негативного потенціалу термопари.
ля
підключення термопар до модулів
аналогового введення, що мають відповідні
вхідні канали, треба слідкувати за
правильністю підключення полярності
виводів цих термопар до вхідних клем
модуля. На клемних панелях модулів є
відповідні написи: клема “Т/С+” – для
підключення позитивного потенціалу
термопари, клема “Т/С-“ – для підключення
негативного потенціалу термопари.
При підключенні датчиків температури у вигляді термоопорів (RTD) можна застосовувати три схеми – двопровідну (рисунок 5.19, а), трипровідну (рисунок 5.19, б) чи чотирипровідну (рисунок 5.19, в).



Рисунок 5.19 – Схеми підключення термоопорів (RTD) до модуля
аналогового введення
Для введення дискретних сигналів ТТЛ – рівня можна застосувати схему підключення цього зовнішнього джерела до модуля дискретного введення, що показана на рисунку 5.20. На схемі показана зліва від клемної колодки частина вхідної схеми модуля з узгоджувальним резистором номіналом 10 кОм. Цей резистор захищає схему модуля від можливих збільшень вхідного дискретного сигналу над ТТЛ - рівнем.

Рисунок 5.20 – Організація ТТЛ – входу для модуля дискретного введення
На рисунку 5.21 наведена ще одна практична схема організації введення дискретного сигналу від ненавантаженого (“сухого”) контакту.

Рисунок 5.21 – Дискретний вхід замикаючого (“сухого”) контакту
Для виведення потужних дискретних сигналів зазвичай використовують додаткове потужне реле, наприклад, монолітне (solid-state relay), яке може будуватися або на тиристорах, або на польових транзисторах, або на інших напівпровідникових елементах. На рисунку 5.22 наведена така схема дискретного виходу, що посилений монолітним реле SSR. На схемі показаний вихідний транзистор TV модуля, що включений за схемою з відкритим колектором, а також обмежувальний резистор R, який не дає вхідному струму монолітного реле збільшитись вище 30 мА. Вихідні клеми монолітного реле підключаються до потужного навантаження та джерела живлення змінного струму. Це може бути обмотки виконавчого електродвигуна чи електромагніт клапана.

Рисунок 5.22 – Дискретний вихід модуля, що працює з монолітним реле
Модулі ADAM можна використовувати як самостійні пристрої регулювання, що реалізують прості закони управління. Так функції контролю стану тривог модуля ADAM-4011 можуть бути використані для побудови простих двопозиційних контролерів, здатних працювати без утручання системного комп'ютера.
Допустимо, що ми виконуємо регулювання процесу нагрівання повітря в сушильній камері (рисунок 5.23). На аналоговий вхід модуля від термопари Т/С будемо подавати сигнал про значення температури повітря в сушильній камері 6, а вихід модуля буде задавати вмикання чи вимикання нагрівача 7.

Рисунок 5.23 – Схема двопозиційного контролера на модулі ADAM-4011
Для забезпечення підтримки постійної температури установимо задану нижню границю функції контролю і задамо миттєвий режим контролю. За допомогою виходу модуля, що фіксує стан нижньої границі (DO0/LO) буде виконуватися управління монолітним реле 5, що керує нагрівачем. У тому випадку, якщо модуль зафіксує значення температури, яка менша встановленої нижньої границі, то він зробить установку стану нижньої границі, що приведе до вмикання нагрівача. Якщо вимірювана температура перевищить значення нижньої границі, то стан тривоги буде скинутий (вихід встановлений у нуль) і нагрівач буде вимкнутий. Ми також можемо додатково використовувати контроль стану верхньої границі, наприклад для активізації аварійного сигналу чи аварійного відключення системи у випадку виходу температури з-під контролю.
Нижчеподаний приклад являє собою просту, написану на мові БЕЙСИК, програму, що може бути використана при реалізації вищеописаного приклада використання модуля ADAM.
10 REM **** приклад використання ******
20 RЕМ ** Вимір температури з контролем так-ні **
30 CLS
40 TURE - 1
50 OPEN "COMl:9600,N,8,1,RS,CD,DS"FOR RANDOMAS #1
55 RЕМ
60 RЕМ **Конфігурування модуля аналогового введення ADAM-4011**
70 REM ==========================================
80 RЕМ ADAM-4011 конфігурується з адресою 02H, входом
85 REM для термопар типу J, швидкістю передачі 9600,
90 REM форматом даних у вигляді технічних одиниць і без
95 REM обліку контрольної суми
100 REM ==========================================
110 PRINT **Конфігурація й установка контролю.....Чекайте**
120 CMD$="%01020E0600"
130 PRINT#1, CMDS
140 RESULT$-INPUT$(4,#1)
150 TEMP$=MID$(RESULT$, 1,3)
160 IF TEMP$<>"102" THEN GOTO 130
170 DELAY = 7: GOSUB 1000 ** Затримка 7 с для конфігурації **
175 RЕМ
180 RЕМ** Контроль установлений на 90°С (нижня границя)**
190 СМ$="@02 LO+90.00"
200 PRINT #1,CMD$
210 RESULTS = INPUTS (4, #1)
220 TEMP$ = MID$(RESULT$, 1,3)
230 IF TEMP$<>"102" THEN GOTO 200
240 DELAY = 2: GOSUB 1000 ** Затримка 2 с до моменту активації установок контролю **
245 RЕМ
250 REM ** Дозволити функції контролю **
260 CMD$ = "@02ЕАМ"
270 PRINT #1,CMD$
280 RESULT$=INPUT$(4, #1)
290 TEMP$=MID$(TEMP$, 1,3)
300 IF TEMP$<>"102" THEN GOTO 270
310 DELAY= 2: COSUB 1000 ** Затримка 2с для дозволу контролю **
315 RЕМ
320 CLS : LOCATE 7, 1
330 PRINT TAB (10);**Стан сушильної печі **
340 PRINT TAB (10);**===============================**
350 PRINT TAB (10); ** Температура печі : 0о С**
360 PRINT TAB (10); ** Контрольна температура : 90°С**
370 PRINT TAB (10); ** Стан нагрівача :**
380 PRINT TAB (10); " * Поточний час :**
390 PRINT TAB (10); **===============================**
400 WHILE TURE
4 10 REM ** Читання поточної температури **
420 CMD$="#02"
430 PRINT #1,CMD$
440 TEMP$=INPUT$(9, #1)
450 LOCATE 9,40
460 TEMP$=MID$(TEMP$, 2, 7)
470 PRINT TEMP$
480 LOCATE 12, 40
490 PRINT TIME$
500 REM ** Читання статусу контролю **
510СМ$="@02D1"
520 PRINT# 1, CMD$
530 ALARM$=INPUT$(9, #1)
540 ALARM$=MID$(ALARM$, 6, 1)
550 LOCATE 11, 40
560 IF (ALARM$="2" OR ALARM$="3") THEN PRINT "ON"
ELSE PRINT "OFF"
570 WEND 580 CLOSE:END 900 REM
1000 REM ** Процедура тимчасової затримки **
1010 START=INT(TIMER)
1020 WHILE DELAY >-l
1030 IF (START<>INT(TIMER)) THEN DELAY=DELAY-1
: START=INT(TIMER)
1040 WEND
1050 RETURN
6 ЗАСОБИ РЕАЛІЗАЦІЇ КЕРУЮЧОГО ВПЛИВУ
НА ТЕХНОЛОГІЧНИЙ ПРОЦЕС
Цей розділ присвячений опису інтерфейсу передавання командної інформації від комп’ютерної системи на технологічний процес, який коротко можна позначити як інтерфейс “керуючий комп’ютер – технологічний процес”. Наявність такого інтерфейсу дозволяє прикладному програмному забезпеченню КСУ ТП здійснювати керуючий вплив на технологічний процес, змінюючи його хід у потрібному напрямку.
Як було зазначено у розділі 1 (див. рис. 1.3) хід технологічного процесу визначається потоками речовин (сировина, матеріали) та потоками енергії, а також впливом зовнішнього середовища. Що стосується останнього, то комп’ютерна система неспроможна цілеспрямовано змінювати вплив зовнішнього середовища, бо він по своїй суті є неконтрольованим зовнішнім збуренням. Тому змінювати хід технологічного процесу можна лише шляхом зміни потоків речовин та потоків енергії, що циркулюють в межах ТП. В даному контексті енергія розуміється у широкому смислі, тобто і як енергія в чистому виді (електрична, теплова, хімічна і т.д.), так і все що пов’язано з її витратами (переміщення, механічні роботи та обробка, хімічні реакції та фізичні перетворення тощо).
У свою чергу, командна інформації, що виробляється програмами КСУ, не є матеріальною, тому вона не може напряму фізично впливати на потоки речовин (сировини, матеріалів) та енергії. Саме для “матеріалізації” впливу цієї інформації в інтерфейс “керуючий комп’ютер – технологічний процес” вводяться спеціальні засоби – виконавчі пристрої (ВП), які сприймають інформацію від КСУ, матеріалізовану у вигляді відповідних сигналів, і виконують фізичні зміни зазначених потоків (рисунок 6.1).
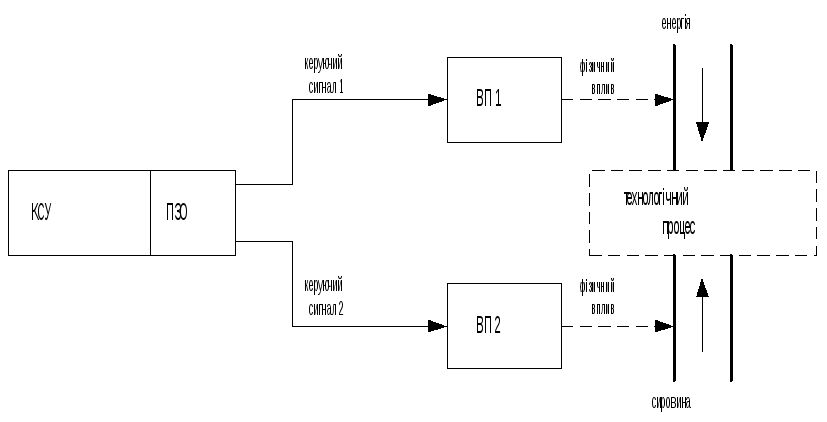
Рисунок 6.1 – Інтерфейс “керуючий комп’ютер – технологічний процес”
Матеріалізація сигналів здійснюється за допомогою пристроїв зв’язку з об’єктом ПЗО (див. розділи 4 та 5), які формують, як правило, електричні керуючі сигнали. Для утворення фізичного впливу на потоки енергії та речовин виконавчі пристрої можуть використовувати будь-який вид допоміжної енергії - електричну (електричні ВП), пневматичну (пневматичні ВП), гідравлічну (гідравлічні ВП), магнітну (магнітні ВП) або їх сукупність (електромагнітні, електропневматичні, електро - гідравлічні і т.д. ВП). При цьому їх вихідний фізичний вплив теж може приймати будь-які форми, наприклад, механічне перекривання потоку сировини, утворення теплового потоку від нагрівача, переміщення інструменту верстата, вмикання чи вимикання електричного обладнання технологічної установки тощо.
6.1 Виконавчі пристрої впливу на потоки речовин
Зазвичай такі ВП складаються (рисунок 6.2) з блоку посилення чи позиціонера (П), виконавчого механізму (ВМ), регулюючого органа (РО), блоку ручного управління, що дублює (БРУ), датчика положення (ДП), блоку зворотного зв'язку (БЗЗ) та блоку сигналізації кінцевих положень (БСКП) вихідної ланки (штока). При цьому ВМ і РО є головними функціональними блоками такого виконавчого пристрою.

Рисунок 6.2 – Загальна будова сучасного виконавчого пристрою
Керуючий сигнал від КСУ несе командну інформацію про потрібний на даний час ступінь пропускання потоку речовини через регулюючий орган РО. Цей ступінь зв’язаний з положенням Н вихідної ланки (вала, штока) ВМ, яка механічно діє на РО установчою силою Fпр. Для переміщення вихідної ланки ВМ у потрібне положення керуючий сигнал спочатку перетворюється у необхідний вид енергії і підсилюється за потужністю (блок П), а потім подається на вхід ВМ. З метою здійснення контролю за правильністю виконання команд в ВП передбачений зворотний зв’язок через ДП і БЗЗ на КСУ. При такій організації комп’ютер буде виконувати роль контролера ВП, бо у разі неточної роботи ВП комп’ютер корегує його роботу шляхом зміни керуючого сигналу. Щоб запобігти виходу ВМ з ладу, БСКП постачає П чи керуючий комп’ютер додатковою інформацією при досягнення крайніх положень РО (“повністю закритий” чи “повністю відкритий”) для своєчасного вимкнення ВМ. Більш вдалим рішенням є обробка цих сигналів блоком П, бо часові затримки при цьому будуть мінімальними.
В сучасних ВП функції контролера все частіше покладаються на блок П, який в такому випадку стає позиціонером. Побудований на сучасній мікропроцесорній техніці і електромеханіці такий позиціонер не тільки точно відпрацьовує керуючі сигнали від КСУ, але і виконує багато додаткових функцій, зокрема діагностику ВП, облік тривалості його роботи та витраченої енергії, відображає настройки ВП на вбудованому дисплеї, самостійно виконує функції регулятора потоку речовини, обмінюється інформацією з будь-яким вузлом КСУ (навіть через Інтернет і мобільний зв’язок) і т. ін. Про інтелектуальні ВП мова піде нижче.
Основними параметрами виконавчих пристроїв є наступні:
вид допоміжної енергії для функціонування ВМ (пневматична, електрична, гідравлічна);
умовний ру і робочий рР тиски потоку речовини, що зв'язані залежністю
pу = pр (σ20доп / σTдоп), (6.1)
де σ20доп , σTдоп — допустиме напруження матеріалу РО відповідно при температурах 20 і ТоС, Па (кг/мм2).
перепад тиску Δр на РО, рівний різниці тисків потоку речовини до РО (p1) і після РО (p2), який визначає тип ВМ і залежить від розмірів РО і конструкції його затвора (для газу цей перепад вище, ніж для рідини);
умовний прохід Dy — номінальний розмір діаметра проходу РО в приєднувальних патрубках.
Усі перераховані параметри відносяться до ВП в цілому, але існують ще велика їх кількість, що стосується окремих його складових – РО, ВМ, П і ДП.
6.2 Регулюючі органи виконавчих пристроїв
РО являє собою перемінний опір для потоку речовини, який впливає на її витрату шляхом зміни свого прохідного перетину під дією енергії ВМ. РО по функціональному призначенню поділяються на запірні і запірно-регулювальні; по виду дії — на нормально відкриті (НВ) і нормально закриті (НЗ); по конструкції затвора — на двосідельні, односідельні, заслінкові, шиберні й ін.; по впливу речовини на затвор - на розвантажені (двосідельні) і нерозвантажені (односідельні, заслінкові, діафрагмові).
Двосідельний РО (рисунок 6.3) складається з корпуса 1 із двома сідлами 5 і затвора 4, який має дві поверхні - що дроселює і що зачиняє. Затвор переміщається у втулках направляючих дисків 2 і 6. З'єднання затвора 4 з ВМ здійснюється за допомогою штока 3. У промисловості найбільш розповсюджений затвор, у якого поверхня, що дроселює, являє собою параболоїд, а поверхня, що зачиняє, виконана у вигляді конічних крайок.
Д восідельний
затвор є майже розвантаженим від дії
сили, створюваної статичним тиском
речовини, і установочне зусилляFпc
від ВМ повинне перевищувати суму сил
неврівноваженого статичного тиску F3,
тиску
речовини на шток Fш
і тертя штока про чепцеве набивання
Fтp,
тобто Fпc>F3
+ Fш+Fтp.
Крім
того, при розрахунку Fпc
робиться запас на сили динамічного
впливу потоку, тертя у втулках дисків
і маси затвора.
восідельний
затвор є майже розвантаженим від дії
сили, створюваної статичним тиском
речовини, і установочне зусилляFпc
від ВМ повинне перевищувати суму сил
неврівноваженого статичного тиску F3,
тиску
речовини на шток Fш
і тертя штока про чепцеве набивання
Fтp,
тобто Fпc>F3
+ Fш+Fтp.
Крім
того, при розрахунку Fпc
робиться запас на сили динамічного
впливу потоку, тертя у втулках дисків
і маси затвора.
Заслінковий РО (рисунок 6.4), що складається із сідла 1 і затвора-диска 2, простий по конструкції, має малі габаритні розміри і масу, а пропускна здатність його приблизно на 50 % більша, ніж у двосідельного, хоча негерметичність вище. Такий регулювальний орган забезпечує 100%-у пропускну здатність при повороті затвора на кут 60°. Заслінковий РО є нерозвантаженим, тому припустимий перепад тиску визначається потужністю ВМ і міцністю конструкції.
Момент, створюваний неврівноваженістю навантаження на затвор, прагне повернути його так, щоб закрити прохід, і визначається по формулі (у Н∙м):
Μ3 = аΔp3, (6.2)
де а — коефіцієнт, що залежить від кута повороту затвора;
Δp — перепад тиску на затворі, Па;
D — діаметр затвора-диска, м.
З урахуванням тертя в опорах затвора
виконавчий механізм вибирається з
дворазовим запасом потужності, причому
варто забезпечити роботу РО при кутах
α до 65-70°.
урахуванням тертя в опорах затвора
виконавчий механізм вибирається з
дворазовим запасом потужності, причому
варто забезпечити роботу РО при кутах
α до 65-70°.
Запірно-регулюючі заслінкові РО забезпечують герметичність перекриття проходу за допомогою пластичного ущільнення на затворі, ущільнювального кільця в корпусі сідла, еластичної сорочки на корпусі сідла чи пружного виконання металевих конструкцій сідла або затвора.
Діафрагмові РО (рисунок 6.5) мають діафрагму (затвор) 2 із пружного матеріалу, що переміщається своєю центральною частиною за допомогою півсфери 4 і перекриває прохід, опускаючись на поперечну перегородку — сідло 5 корпуса 1. Передача зусилля від виконавчого механізму здійснюється через шток 3. Одночасно діафрагма служить розділовою мембраною між робочою речовиною і рухомими металевими деталями РО. Така конструкція дозволяє керувати потоками агресивних робочих речовин при нанесенні на внутрішню поверхню корпуса кислотостійких покрить і застосування пружного кислотостійкого матеріалу для діафрагми (фторопласт, кислотостійка гума).
П ропускна
здатність РО змінюється приблизно
лінійно тільки при величині ходу в
межах перших 25 %, тому хід затвора
в діафрагмових органах не перевищує 25
% величини умовного діаметра.
Діафрагмовий РО є нерозвантаженим від
зусилля статичного тиску, а тому рядDy
діафрагмових
органів, що випускаються, обмежений і
визначається тиском робочої речовини.
ропускна
здатність РО змінюється приблизно
лінійно тільки при величині ходу в
межах перших 25 %, тому хід затвора
в діафрагмових органах не перевищує 25
% величини умовного діаметра.
Діафрагмовий РО є нерозвантаженим від
зусилля статичного тиску, а тому рядDy
діафрагмових
органів, що випускаються, обмежений і
визначається тиском робочої речовини.
Основними параметрами РО (поряд з віднесеними вище до параметрів ВП умовним тиском, перепадом тиску й умовним проходом) є такі:
величина максимальної умовної пропускної здатності КV у - витрата речовини певної щільності при повному відкритті РО і заданому перепаді тиску на ньому; числові значення КV в утворюють стандартні ряди ( 1,0; 1,6; 2,5; 4,0; 6,3 для двосідельних і заслінкових; 1,25; 2,0; 3,2; 5,0; 8,0 — для односідельних і діафрагмових РО);
умовна величина ходу затвора Ну;
пропускна характеристика КV = f(H) — установлює залежність пропускної здатності КV від переміщення H затвора
видаткова характеристика g = f(l) — виражає залежність відносної витрати середовища g = GM/GMмакс=GО/GОмакс через РО від ступеню його відкриття l = H/Hу (де GO, GM, GОмакс, GMмакс — об'ємні і масові витрати середовища при ході затвора Η і Ну);
силова характеристика Fпc = f(H) — визначає залежність зміни необхідного установочного зусилля Fпc від переміщення затвора Н;
діапазон регулювання, чи діапазон збереження пропускної характеристики, KVy/KVr (KVr — коефіцієнт пропускної здатності при підйомі регулюючого органа на 10 % від величини Ну;
негерметичність затвора — визначається пропуском середовища через затворне з'єднання при цілком закритому проході за рахунок зусилля виконавчого механізму.
Сучасні РО поставляються промисловістю з наступними трьома пропускними характеристиками КV = f(H): лінійною, що відповідна квадратному кореню та рівного процентного відношення.
Ці залежності показані на рисунку 6.6. При лінійній характеристиці збільшення пропускної здатності dКV пропорційно переміщенню затвора dН:
dKV=(KVy/Ну)dН, (6.3)
де KVy - максимальна умовна пропускна здатність, м3/год;
Ну — повний хід затвора, м.
При характеристиці рівного процентного відношення (показовій) збільшення пропускної здатності dKV по ходу затору dН пропорційно поточному значенню пропускної здатності КV:
![]() ,
(6.4)
,
(6.4)
де KV0 — пропускна здатність у перший момент відкриття затвора, м 3/год;
Слід зазначити, що ідеальний РО рівного процентного відношення не закривається цілком. На практиці їх проектують таким чином, щоб одержати лінійну характеристику при дуже малих відкриттях, і, отже, вони закриваються цілком.
Р озмір
РО звичайно вибирають відповідно до
параметрів трубопроводу, уякому
він встановлюється. Вибір конструкції
РО і розмірів сідла і затвора на практиці
здійснюється на основі спеціальних
номограм. При цьому враховуються:
озмір
РО звичайно вибирають відповідно до
параметрів трубопроводу, уякому
він встановлюється. Вибір конструкції
РО і розмірів сідла і затвора на практиці
здійснюється на основі спеціальних
номограм. При цьому враховуються:
втрати тиску на РО (pressure drop); необхідність зниження цих втрат може зажадати застосування різних типів РО, наприклад типу "метелик" (butterfly valve);
максимальна витрата (maximum flowrate), що зводиться до сполучення максимальної розрахункової витрати з максимальною зоною управління, яка повинна в ідеалі складати 30-50 % від розрахункової витрати;
керованість (rangeability), як відношення витрат при двох різних положеннях штока ВМ, зв'язане з конструкцією затвору і сідла і залежністю втрат напору від видаткових характеристик, що, у свою чергу, зв'язані з характеристиками нагнітаючого насоса; керованість повинна забезпечувати номінальний діапазон витрат із відповідними зонами управління (бажано 30-50 %) по обох сторонах діапазону;
чутливість (sensitivity), зв'язана з керованістю і величиною керуючого діяння, необхідного для управління з заданою точністю; іноді великий РО забезпечує номінальну витрату, а малий, установлений паралельно, забезпечує необхідну чутливість;
гістерезис {hysteresis), що виникає через процеси сухого тертя (прилипання) у місці притиснення затвора РО до сідла, а також втрат тиску (напору); гістерезис є причиною невеликих постійних коливань у контурі управління, для боротьби з яким можна застосовувати точний позиціонер РО.
6.3 Виконавчі механізми для управління регулюючими органами
ВМ служить приводною частиною ВП, що перетворює сигнал керуючого комп’ютера чи позиціонера в установочне зусилля для управління РО.
Виконавчі механізми по виду руху вихідного елемента поділяються на прямоходові, однооборотні (з кутом повороту менше 360о) і багатооборотні; по виду використовуваної енергії — на пневматичні, електричні, електромагнітні і гідравлічні; по наявності поворотної пружини — на безпружинні і пружинні.
Пневматичні виконавчі механізми (ПВМ) по типу силового елемента підрозділяються на мембранні (МВМ) і поршневі (ПВМ).
Мембранно-пружинні ВМ (рисунок 6.7) мають робочу порожнину, утворену мембраною 2 і кришкою (верхньою 1 чи нижньою 4), куди подається стиснене повітря тиском р. Центральна частина мембрани, герметично закладеної між кришками, спирається на опорний диск 3, що сприймає установочне зусилля і жорстко зв'язаний з вихідним штоком 6 механізму.
У становочне
зусилля в одному напрямку створюється
за рахунок тиску повітря в робочій
порожнині, а в протилежному — за рахунок
пружності стиснутої пружини5.
становочне
зусилля в одному напрямку створюється
за рахунок тиску повітря в робочій
порожнині, а в протилежному — за рахунок
пружності стиснутої пружини5.
Мембранні виконавчі механізми в залежності від напрямку руху вихідної ланки при підвищенні тиску в робочій порожнині бувають прямої дії (П), у яких приєднувальний елемент вихідної ланки (шток) віддаляється від площини закладення мембрани, і зворотної дії (З), у яких приєднувальний елемент вихідної ланки (шток) наближається до площини закладення мембрани. Крім того, існують ще МВМ з коливальним (К) переміщенням вихідної ланки.
Основними характеристиками МВМ є величина ефективної площі мембрани So= = 0,64D 2 [м2] з діаметром закладення D; припустимий тиск стиснутого повітря в робочій порожнині, що визначається діаметром D; умовний хід механізму Ну= (0,1÷0,2)∙D [м] ; установочне зусилля Fпк: для прямого ходу Fпс = (р-рн)SЭ-С∙Ну [Н]; для зворотного ходу Fпс = CHy - (р-- рн)SЭ [Н] (де р, рн — поточний і початковий тиски в робочій порожнині, Па; С — жорсткість пружини, м∙Па); ходова характеристика Н(р) — залежність між ходом Н механізму і тиском р у робочої порожнини; зусилля F1 , що утворює неузгодженість ходу, рівну 1%.
Н а
рисунку 6.8 наведена конструкція
мембранного ВМ виробництва фірми
Fisher-Rosemaunt. Пневматичні мембранні приводи
моделей 1051 і 1052 для поворотних клапанів
являють собою приводи з поворотною
пружиною, що забезпечують надійну РО.
Привод моделі 1051 призначений для роботи
в режимі "відкритий-закритий", а
також у комплекті з позиціонером чи
контролером у режимі регулювання
положення РО. Приводи моделі 1052 можуть
працювати в обох режимах з позиціонером
чи контролером або без них. Особливістю
приводів є наявність одного сполучного
вузла з важелем спеціальної конструкції,
що забезпечує мінімальний люфт і високу
точність регулювання.
а
рисунку 6.8 наведена конструкція
мембранного ВМ виробництва фірми
Fisher-Rosemaunt. Пневматичні мембранні приводи
моделей 1051 і 1052 для поворотних клапанів
являють собою приводи з поворотною
пружиною, що забезпечують надійну РО.
Привод моделі 1051 призначений для роботи
в режимі "відкритий-закритий", а
також у комплекті з позиціонером чи
контролером у режимі регулювання
положення РО. Приводи моделі 1052 можуть
працювати в обох режимах з позиціонером
чи контролером або без них. Особливістю
приводів є наявність одного сполучного
вузла з важелем спеціальної конструкції,
що забезпечує мінімальний люфт і високу
точність регулювання.
Вузол кріплення штока привода до вала клапана закритий спеціальним кожухом для забезпечення безпечної роботи, при цьому доступ до регулювання ущільнення забезпечується без зняття яких-небудь деталей. РО може бути обладнаний:
верхнім ручним дублером;
знімним ручним приводом моделі 1078;
регульованими обмежниками ходу;
пристроєм для блокування, що блокує переміщення привода під час виконання технічного обслуговування;
вентиляційним виводом для відводу газу з кожуха привода.
Додатковими пристроями МВМ моделі 1052 є такі:
електропневматичні позиціонери;
цифрові контролери FIELDVUE;
високоточні контактні сигналізатори кінцевих положень штока.
Поршневі ВМ характеризуються підвищеним установочним зусиллям і меншими габаритними розмірами в порівнянні з мембранним завдяки використанню більшого тиску р вхідного стиснутого повітря (до 1÷1,5 МПа), а також значним ходом штока.
Поршневий безпружинний виконавчий механізм (рисунок 6.9) складається з циліндра 1, у який поміщений поршень 2, жорстко зв'язаний зі штоком 3. Усі нерухомі з'єднання циліндрів ущільнюються за допомогою кілець круглого перетину, а рухливі — манжетами U-образного типу.
Основними характеристиками поршневих ВМ є діаметр циліндра D, допустимий тиск робочого середовища р, хід штока Н і установочне зусилля привода Fпс:
Fпc = 0,785/D2 - d2/рηмех, (6.5)
де D, d — діаметри циліндра і штока, м; ηмех— ККД привода, прийнятий рівним 0,85÷0,95.
Д ля
зменшення неузгодженості між вхідним
пневматичним сигналомр
і відповідним цьому сигналу переміщенням
Н вихідного
штока ВМ широко використовують
позиціонери. Вони являють собою
підсилювачі потужності зі зворотним
зв'язком по положенню штока пневматичного
виконавчого механізму. З його допомогою
забезпечується швидкодія, жорсткість
характеристики і точність установки
вихідного штока ВМ.
ля
зменшення неузгодженості між вхідним
пневматичним сигналомр
і відповідним цьому сигналу переміщенням
Н вихідного
штока ВМ широко використовують
позиціонери. Вони являють собою
підсилювачі потужності зі зворотним
зв'язком по положенню штока пневматичного
виконавчого механізму. З його допомогою
забезпечується швидкодія, жорсткість
характеристики і точність установки
вихідного штока ВМ.
Н а
рисунку 6.10 наведена загальна конструкція
ПВМ моделі 1061 фірми Fisher-Rosemaunt. Він являє
собою привод подвійної дії, що забезпечує
надійну роботу РО. Привод моделі 1061
призначений для роботи в режимі "відкритий
- закритий" чи, у комплекті з контролером
або позиціонером, - у режимі регулювання.
Особливістю привода є наявність одного
сполучного вузла з важелем спеціальної
конструкції, що забезпечує мінімальний
люфт і високу точність регулювання.
а
рисунку 6.10 наведена загальна конструкція
ПВМ моделі 1061 фірми Fisher-Rosemaunt. Він являє
собою привод подвійної дії, що забезпечує
надійну роботу РО. Привод моделі 1061
призначений для роботи в режимі "відкритий
- закритий" чи, у комплекті з контролером
або позиціонером, - у режимі регулювання.
Особливістю привода є наявність одного
сполучного вузла з важелем спеціальної
конструкції, що забезпечує мінімальний
люфт і високу точність регулювання.
Вузол кріплення штока привода до вала клапана закритий спеціальним кожухом для забезпечення безпечної роботи, при цьому доступ до регулювання ущільнення забезпечується без зняття яких-небудь деталей. Приводи оснащуються знімним ручним приводом моделі 1078 з циліндричним байпасним клапаном, пристроєм для блокування, що перешкоджає переміщенню привода під час виконання технічного обслуговування і вентиляційним виводом для відводу газу з кожуха привода. Додатковими пристроями ВМ є електропневматичний позиціонер та модуль високоточних контактних індикаторів крайніх положень штока.
Електричні виконавчі механізми (ЕВМ) по характеру переміщення вихідної ланки (важеля, штока, вала) випускаються однооборотними (кут повороту менше 360о), багатооборотними і прямоходовими.
Промислові ЕВМ з постійною швидкістю переміщення вихідного вала складаються з реверсивного електродвигуна, редуктора і вихідної ланки. В них вбудовані також пристрої, що забезпечують зупинку механізму в крайніх положеннях, самогальмування при відключенні електродвигуна, зворотний зв'язок по положенню регулюючого органа, дистанційне указування і сигналізацію його положення, а також ручне управління механізмом при необхідності (див. рис. 6.2)
Механізм електричний однооборотний призначений для автоматичного та дистанційного управління регулюючими органами і складається (рисунок 6.11) з електродвигуна 1 і редуктора 2, вихідний важіль 3 якого виконує обертальний рух. Механізм оснащений ручним приводом 4 і блоком перетворювачів 2.

Рисунок 6.11 – Однооборотний ЕВМ типу МЭО-16-IIВТ4-00