

Список рекомендованной литературы
Краснов А.Е. и др. Информационные технологии
пищевых производств в условиях неопределенности.
– М.: ВНИИМП, 2001. - 496 с.
2. Филлипс Ч., Харбор Р. Системы управления с обратной
связью. Пер. с англ. – М.: Лаборатория базовых знаний, 2001. - 616 с.
3. Дорф Р., Бишоп Р. Современные системы управления.
Пер. с англ. – М.: Лаборатория базовых знаний, 2002.
- 832 с.
Словарь основных понятий и сокращений
X(s) – образ Лапласа входного сигнала x(t) линейной системы.
Y(s) – образ Лапласа выходного сигнала y(t) линейной системы.
E(s) – образ Лапласа ошибки регулирования, E(s) = X(s) – Y(s).
G(s) – передаточная функция разомкнутой линейной системы
(объекта управления), G(s) = Y(s) / X(s) .
R(s) – передаточная функция цепи обратной связи.
П(s) – передаточная функция замкнутой линейной системы,
П(s) = G(s) /[1 + R(s) G(s)] .
(t) – ступенчатая функция Хевисайда,
(t) = 0 для t < 0 и (t) = 1 для t 0.
(t) – импульсная функция Дирака,
(t) = для t = 0 и (t) = 0 для t 0.
G(j) – частотная характеристика линейной системы,
G(j) = G(s = j).
F(z)
– z-образ
функции f(t),
![]() .
.
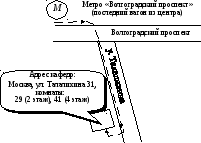
Телефоны кафедр: 270-91-90; 270-66-00
______________________________________________________
Воробьева Алла Викторовна,
Краснов Андрей Евгеньевич
Основы систем управления технологическими процессами
Учебно-практическое пособие
Тираж: _____ экз., заказ № ____