

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОССУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«Тюменский государственный нефтегазовый университет»
ИНСТИТУТ НЕФТИ И ГАЗА
Кафедра «Автоматизации и управления»
Методические указания к лабораторным занятиям по дисциплине «Теория автоматического управления» для студентов специальностей «Автоматизация технологических процессов», «Электропривод и автоматика промышленных установок и технологических комплексов».
Расчёт настроек дискретного ПИ-регулятора в пакете “Мatlab”
Тюмень 2005
Утверждено редакционно-издательским Советом Тюменского государственного нефтегазового университета
Составители: доцент, к.т.н. Макарова Л.Н.,
к.т.н. Макаров А.В.
асс. Фомин В. В.
@Государственное образовательное учреждение высшего профессионального образования
«Тюменский государственный нефтегазовый университет» 2005г.
Содержание
Содержание………………………………………………………………….3
-
Основные сведения……………………………………………….4
-
Пример расчета настроек дискретного ПИ-регулятора в одноконтурной системе…………………………………………13
-
Расчет настроек дискретногоПИ-регулятора
в «Matlab»…………………………………………………………22
-
Задания для самостоятельной работы………………………………....32
-
Список литературы………………………………………………34
3
-
Основные сведения
Расчет настроек
дискретного регулятора
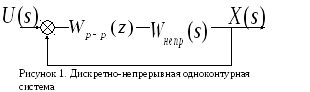
![]() в одноконтурной системе (Рисунок 1)
сводится к следующим шагам:
в одноконтурной системе (Рисунок 1)
сводится к следующим шагам:
-
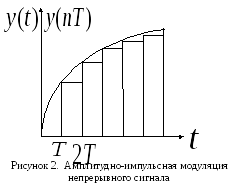
Дискретно-непрерывная система заменяется эквивалентной дискретной, при этом в схеме появляются ключ и фиксатор определенного порядка. В частности, если используется фиксатор нулевого порядка, то считанное в начале периода значение переменной сохраняется таковым в течение всего периода (Рисунок 2).
1.2. Выделяется приведенная непрерывная часть, она состоит из фиксатора определенного порядка и собственно непрерывной части.
4
1.3. Строится Z-изображение для передаточной функции приведенной непрерывной части.
1.3.1. Для этого
записывается передаточная функция
приведенной непрерывной части
![]() :
:
![]() ,
где
,
где
![]() - передаточная функция выбранного типа
фиксатора;
- передаточная функция выбранного типа
фиксатора;
фиксатор нулевого порядка имеет передаточную функцию
![]() ,
где
,
где
![]() -
период дискретизации;
-
период дискретизации;
![]() - передаточная
функция исходной непрерывной части.
- передаточная
функция исходной непрерывной части.
Замечание: Если обратная связь неединичная, то после структурных преобразований с целью получения единичной обратной связи:
![]() ;
;
![]() .
.
Внимание:
![]()
В случае, если используется фиксатор нулевого порядка, то z-передаточная функция может быть найдена по формуле
5
![]() .
.
-
Для нахождения z-передаточной функции от
 нужно выполнить следующие шаги.
нужно выполнить следующие шаги.
Разложить
![]() на простые дроби:
на простые дроби:
![]()
![]()
![]()
Найти неопределенные
коэффициенты
![]() ,
приведя правую часть (1) к общему
знаменателю, раскрыв скобки, сгруппировав
слагаемые с одинаковыми степенями и
получив систему уравнений относительно
,
приведя правую часть (1) к общему
знаменателю, раскрыв скобки, сгруппировав
слагаемые с одинаковыми степенями и
получив систему уравнений относительно
![]() . Разрешить систему относительно этих
коэффициентов
. Разрешить систему относительно этих
коэффициентов
![]() .
.
Подставить их в правую часть (1) и найти оригинал для каждой дроби.
Затем для оригинала каждой дроби найти z-изображение и привести к общему знаменателю.
1.4. Записать
z-передаточную
функцию разомкнутой системы
![]() ,
где
,
где
![]() - передаточная функция выбранного
регулятора с неизвестными коэффициентом
усиления
- передаточная функция выбранного
регулятора с неизвестными коэффициентом
усиления
![]() и постоянными времени
и постоянными времени
![]() .
.
6
-
Любым известным способом (метод расширенных КЧХ, метод КЧХ и др.) находят оптимальные настройки из условия, что в оптимальной области
 .
. -
Метод комплексных частотных характеристик при ограничении на частотный показатель колебательности
 .
.-
Если заданы прямые показатели качества, то по ним нужно найти соответствующие
 (Приложение 1) по схеме:
(Приложение 1) по схеме:
-
![]() ;
;
![]() ;
;
![]()
-
Построить окружность для заданного
 ;
радиус этой окружности вычисляется
по формуле:
;
радиус этой окружности вычисляется
по формуле:
![]() ;
центр имеет координаты
;
центр имеет координаты
![]() .
.
-
В передаточной функции
 заменить
заменить
 ,
,
 -
период дискретизации; задать значение
-
период дискретизации; задать значение
 ;
значение
;
значение
 и построить амплитудно-фазовую
частотную характеристику
и построить амплитудно-фазовую
частотную характеристику
 .
.
Замечание. Период дискретизации выбирается как наибольший общий делитель для чисел, определяющих время запаздывания и постоянные времени объекта (если таковой имеется). Это позволяет воспользоваться обычным z-преобразованием.
Если такой вариант невозможен или период дискретизации задаётся заранее, а постоянные времени не делятся нацело на предлагаемый период, то необходимо воспользоваться модифицированным z-преобразованием.
7
Т. к.
![]() ,
то для построения КЧХ достаточно изменить
частоту на одном периоде:
,
то для построения КЧХ достаточно изменить
частоту на одном периоде:
![]() или
или
![]() ,
или
,
или
![]() .
.
Если КЧХ заходит
в запретную область, заданную окружностью,
то сохраняя
![]() ,
необходимо уменьшить
,
необходимо уменьшить
![]() ,
если не доходит до окружности, то
увеличивать
,
если не доходит до окружности, то
увеличивать
![]() до тех пор, пока годограф не коснется
окружности, тем самым определяя первую
пару значений (
до тех пор, пока годограф не коснется
окружности, тем самым определяя первую
пару значений (![]() и
и
![]() ).
).
Затем процедура
повторяется после задания следующего
значения
![]() .
.
На практике
![]() задают из интервала
задают из интервала
![]() ,
где
,
где
![]() - наибольшая постоянная времени в
элементах непрерывной части.
- наибольшая постоянная времени в
элементах непрерывной части.
-
Найденные значения
 и
и
 сводятся либо в таблицу 1,
сводятся либо в таблицу 1,
Таблица 1. Таблица значений настроек регулятора
8
либо строятся графики (Рисунок 3).
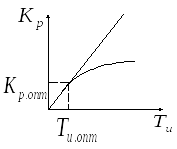

По ним находятся
оптимальные настройки, соответствующие
наибольшему значению отношения
![]() .
.
-
Найденные настройки проверяются на обеспечение качества регулирования.
9
-
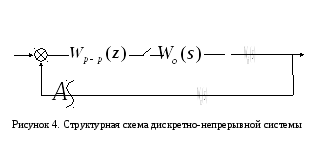
Для этого строится передаточная функция замкнутой системы (рисунок 4).
 .
.
![]()
для неединичной
обратной связи, здесь
![]() - передаточная функция прямой цепи
- передаточная функция прямой цепи
![]() ,
,
![]() -
передаточная функция системы, разомкнутой
в
-
передаточная функция системы, разомкнутой
в
точке
![]() :
:
![]() .
.
Если обратная связь единичная, то передаточная функция замкнутой системы вычисляется как
![]() .
.
10
-
Для определения фактического значения частотного показателя колебательности
 строится АЧХ замкнутой системы:
строится АЧХ замкнутой системы:
 или
или
 ,
в зависимости от вида обратной связи.
,
в зависимости от вида обратной связи.
Т. к. система
астатическая (в регуляторе присутствует
интегрирующее звено), то
![]() ,
,
![]() .
.
Если
![]() , то расчет удовлетворительный, если
нет, то нужно провести перерасчет
настроек регулятора.
, то расчет удовлетворительный, если
нет, то нужно провести перерасчет
настроек регулятора.
1.8.3. Для определения прямых показателей качества строят переходную характеристику, определив её z-изображение:
 ,
которое
раскладывается в рад Лорана. Для этого
в числителе и знаменателе раскрываются
скобки, многочлены записываются в
порядке убывания степеней и проводится
деление:
,
которое
раскладывается в рад Лорана. Для этого
в числителе и знаменателе раскрываются
скобки, многочлены записываются в
порядке убывания степеней и проводится
деление:
![]()


![]()
![]()
11
![]()
Оригинал переходной
характеристики
![]() имеет
вид
имеет
вид
![]()
График
![]() -
ступенчатая линия, ордината каждой
ступеньки определяется
-
ступенчатая линия, ордината каждой
ступеньки определяется
![]() (рисунок 5).
(рисунок 5).
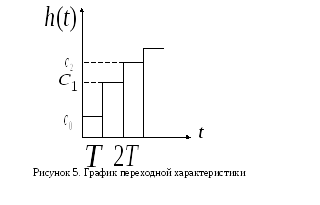
По переходной
характеристике определяются прямые
показатели качества
![]() и
и
![]() и сравниваются с заданными. Если
и сравниваются с заданными. Если
![]() ;
;
![]() ,
то расчет заканчивается, если нет, то
его повторяют, изменив интервал
варьирования
,
то расчет заканчивается, если нет, то
его повторяют, изменив интервал
варьирования
![]() .
.
12