

3. Пример
3.1. Найти оптимальные настройки дискретного ПИ – регулятора, если задана передаточная функция объекта, прямые показатели качества (перерегулирование и время регулирования tр).
Последовательность расчета рассмотрим на примере.
Структурная схема приведена на рисунке 1.
Wp(z) Wоб(s)









Рисунок 1. Структурная схема
Так как регулятор работает в дискретном режиме, то схема дискретной САР может быть представлена следующим образом (рисунок 2):
Wp(z) Wоб(s) Wо(s;z)













Рисунок 2. Структурная схема дискретной САР
Wp(z) – передаточная функция регулятора;
Wo(s) – передаточная функция фиксатора некоторого порядка;
Wоб(s) - – передаточная функция объекта регулирования;
Известна
передаточная функция объекта
![]() .
.
Чтобы написать эту передаточную функцию в Mathcad, надо: перейти на английский язык; удерживая клавишу Shift нажать на W; затем перейти на русский язык и набрать «об»; открыть скобки; перейти на английский язык и нажать на «s»; закрыть скобку; далее удерживая Shift нажать на: («ж» в русском варианте), появится знак =, далее нажать на знак деления /, набрать kоб по вышеуказанным правилам, нажать на знак умножения * на клавиатуре; нажать «e» и затем удерживая клавишу Shift нажать на 6 на клавиатуре, появится степень числа, нажать знак минус (-), затем в верхнем меню включить функцию МАТЕМАТИКА, для этого зайти в ВИД – ПАНЕЛИ ИНСТРУМЕНТОВ – поставить галочку у МАТЕМАТИКА; появится

левой
кнопкой мыши нажать на
![]() ,
появится
,
появится

нажать на ; у «e» появится степень -; затем нажать на *s; затем левой кнопкой мыши кликнуть на нижний чёрный прямоугольник и набрать T1*s+1;
Это звено апериодическое с запаздыванием, здесь
kо – коэффициент передачи (усиления);
T1 – постоянная времени;
- время запаздывания.
![]() - передаточная
функция фиксатора нулевого порядка,
сохраняющего измеренную в момент времени
T*i амплитуду до следующего измерения в
момент (i+1)T.
- передаточная
функция фиксатора нулевого порядка,
сохраняющего измеренную в момент времени
T*i амплитуду до следующего измерения в
момент (i+1)T.
Эта
же передаточная функция в форме (z;
s)
имеет вид
![]() .
.
3.2.
Выберем закон регулирования, допустим,
ПИ – закон. В дискретной форме
 .
.
Чтобы написать эту передаточную функцию в Mathcad, надо воспользоваться вышеперечисленным правилом построения, только необходимо учитывать, что все индексы у букв должны быть английскими (kp, Tu, ko и пр.).
Для расчета должны быть заданы параметры объекта, пусть
ko=10, T1=20 c, =5 c. Чтобы написать ko в Mathcad, нужно набрать ko; затем удерживая Shift нажать на: («ж» в русском варианте), появится знак =, далее 10. Аналогично T1, и пр.
3.3. Выберем период квантования так, чтобы при делении /Т получилось целое число (наименьшее), поэтому Т=5 с.
3.4. Построим передаточную функцию разомкнутой системы:
Wp(z) Wпр.н.ч(z)


Приведённая
непрерывная часть состоит из последовательно
соединённых объекта и фиксатора, в нашем
случае нулевого порядка с передаточной
функцией ![]() .
.
![]() .
.
Z- передаточная функция, если используется фиксатор нулевого порядка, имеет вид:

![]()
Так
как объект имеет запаздывание, то нужно
воспользоваться теоремой о запаздывании,
то есть множителю е-sτ
соответствует в изображении множитель
z-τ/T,
а дробь
![]() можно разложить на дроби и перейти кz-
изображению:
можно разложить на дроби и перейти кz-
изображению:

![]()
По формуле (2) и (7) из приложения 1 получаем:

![]() ;
;
![]() .
.
Второй вариант – использование построения в программе Mathcad.
Чтобы
построить z-
преобразование в Mathcad
необходимо сделать следующее: взять z
– преобразование от ![]() ,для этого в меню
,для этого в меню

нажимаете
на ![]() ,появится
,появится

где
нажать на ![]() , затем s,
предварительно выделив соответствующее
выражение, получится
, затем s,
предварительно выделив соответствующее
выражение, получится
![]() .
Далее нажимаете на
.
Далее нажимаете на![]() по t,
получите следующее выражение
по t,
получите следующее выражение
![]() .
.
Аналогичным
образом берёте z-
преобразование от
![]() ,получите
,получите

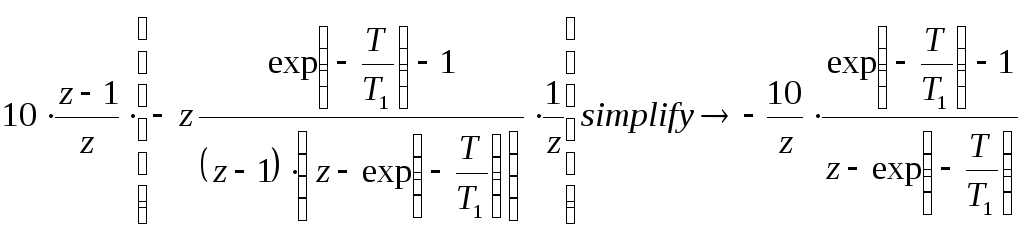
Затем копируете правые части получившихся
выражений и перемножаете, не забывая
умножить на
![]() ,
получите
,
получите

Выделив это выражение, нажмите на
![]() ,
получите
,
получите![]()
 .
(1)
.
(1)
Это выражение и будет z- передаточной функцией приведенной непрерывной части (объект + фиксатор)Wпр.н.ч.(z) вMathcad.
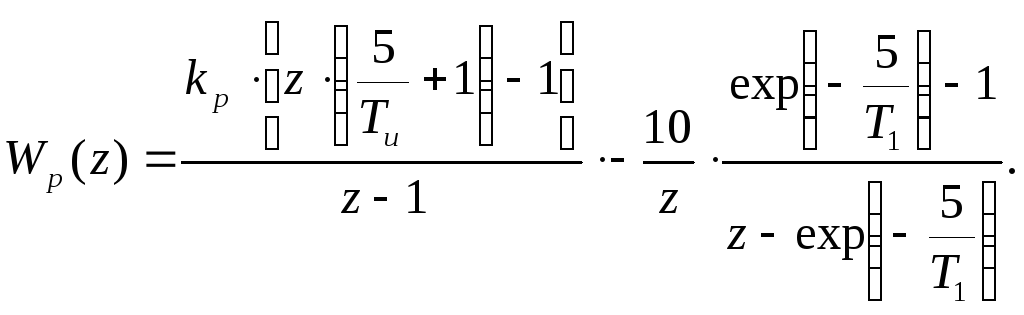
Выбираем закон регулирования, например ПИ – регулирования (Приложение 2). Передаточная функция разомкнутой системы при выбранном законе ПИ- регулирования имеет вид (так как регулятор и приведённая непрерывная часть соединены последовательно, то их передаточные функции перемножаются):
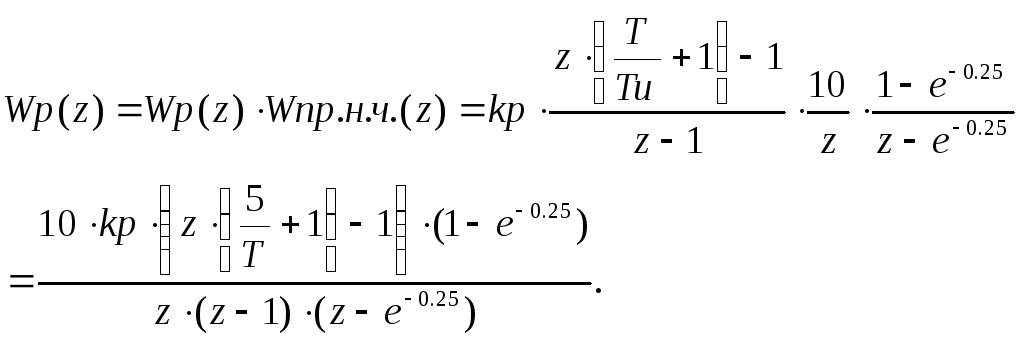
В Mаthcadнабираете передаточную функцию ПИ – регулятора и домножаете на (1), получится:

Это передаточная функция разомкнутой системы при выбранном законе ПИ- регулирования, представленная в Mathcad.
Присваиваете
Wp(z)
данное выражение, т.е. набираете полностью
на английском языке Wp(z)
и присваиваете (нажав одновременно на
Shift
и ;) полученный результат (копируете
передаточную функцию и вставляете её
на место выделенного квадрата![]() ).
).
3.5. Нахождение оптимальных настроек регулятора kp и Tu графоаналитическим методом
3.5.1. По заданным параметрам перерегулирования =25 % и времени регулирования tp=45 с., определим показатель колебательности М. Для этого последовательно используем номограммы (Приложение 3):
Номограмма 1: по заданному находим Рmax=1,19.
По номограмме 2 по найденному Рmax находим L=16 и =23.
По
номограмме 3 по L
(модуль в децибелах) и
(запас по фазе) находим Мдоп=1,18. Заносите
Mдоп
в Mathcad
(![]() ), 1,18.
), 1,18.
3.5.2. На комплексной плоскости (u; v) строим окружность:
![]()
Для построения окружности в Mathcadпишете следующие выражения:
![]()
![]() ,
,
где
![]() и
и![]() ,
причём А иR
должны располагаться выше, чем x(f)
и y(f).
,
причём А иR
должны располагаться выше, чем x(f)
и y(f).
3.5.3. Записываем z – передаточную функцию разомкнутой системы. Анализируем постоянные времени объекта, выбираем наибольшую. Строим интервал с центром Тнаиб. и (30-50)%*Тнаиб..
В нашем случае Tнаиб.=Т1=20 с.; выбираем интервал (12-28) с.
3.5.4. Задаём Тu=12 с.;
задаёмkp,
например 2, строим комплексную частотную
характеристику (КЧХ) разомкнутой системы,
для этого заменяем![]() вWp(z).
вWp(z).
В Mathcadзаносите![]() .
Записываете выражениеWp(z)
по вышеприведенным методам:
.
Записываете выражениеWp(z)
по вышеприведенным методам:
и последовательно нажимаете на
![]() затем на
затем на![]() ,
получите довольно длинное выражение.
Либо вручную заменяя в последнем
выражении
,
получите довольно длинное выражение.
Либо вручную заменяя в последнем
выражении![]() ,
получите
,
получите
Так как eiωT=cos(ωT)+i*sin(ωT) – функция периодическая, то для построения графика КЧХ достаточно изменять значения w на одном периоде (либо [-/Т;/Т], либо [0; 2/Т], либо [0;/Т] ).
В Mathcadнабираетеw,
присваиваете 0, затем на английском
языке нажимаете на «;», появятся .. , затем
пишите![]() ,
получите
,
получите![]() .
.
Т. к. шаг по умолчанию может быть слишком
большим, то можно задать его принудительно,
например
![]() ,
для этого при задании шага после первой
цифры ставим запятую и указываем
требуемый шаг
,
для этого при задании шага после первой
цифры ставим запятую и указываем
требуемый шаг![]() .
.
Построение ведём на той же плоскости, где построена окружность
О
![]() ;
;![]() .
.