

Для построения графика в меню

нажимаете
на ![]() ,получите меню
следующего вида:
,получите меню
следующего вида:
 ,
,
где
нажимаете левой кнопкой мыши на ![]() ,получите
,получите
Внизу
рамки записываете через запятую
![]() ,
,![]() ,а
в левом верхнем прямоугольнике
,а
в левом верхнем прямоугольнике![]() ,
,![]() ,
получите следующий график:
,
получите следующий график:
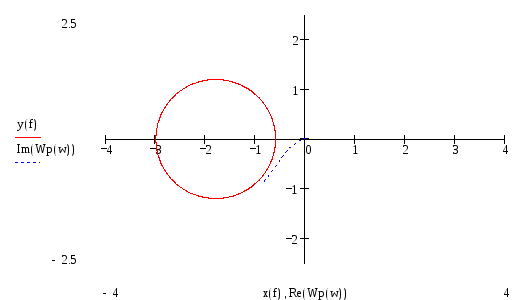
3.5.5. Если АЧХ пересекает окружность, то kpуменьшаем, если не доходит до неё, то увеличиваемkp. Процесс заканчивается, как только КЧХ касается окружности.Таким образом найдена первая точка (Тu=12с,kp=0,129).
3.5.6. Выбираем следующее значение Tu=14c; находимkp2=0,145.
3.5.7.
Построение
графика
![]()
Строим
интервал с центром Т = 20 и ±50% от Тu.
Получаем интервал от 10 до 30 с. Для
построения графиков в среде MathCad,
необходимо задать значения Кр
и Ти.
Для этого набираем Kр
в MathCad
и ставим знак «присвоить»
![]() ,
который находиться в панели инструментов
«Калькулятор». Далее, в панели инструментов
«Matrix»
щелкаем по значку:
,
который находиться в панели инструментов
«Калькулятор». Далее, в панели инструментов
«Matrix»
щелкаем по значку:

Появится следующее меню:
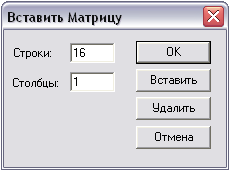
В графе «Столбцы» ставим значение 1, а в графе «Строки» - значение, равное количеству значений Кр и нажимаем OK. Далее заносим значения в получившеюся матрицу. То же самое проделываем и с Ти. В итоге получаем:
|
Tu |
kp |
kp/ Tu |
|
10 |
0,1 |
0,01 |
|
12 |
0,118 |
0,009833 |
|
14 |
0,139 |
0,009929 |
|
16 |
0,158 |
0,009875 |
|
18 |
0,166 |
0,010333 |
|
20 |
0,173 |
0,00865 |
|
22 |
0,178 |
0,008091 |
|
24 |
0,182 |
0,007583 |
|
26 |
0,186 |
0,007154 |
|
28 |
0,19 |
0,006786 |
|
30 |
0,193 |
0,006433 |
|
32 |
0,195 |
0,005472 |
|
36 |
0,2 |
0,003333 |
Далее, в панели инструментов «Graph» кликнем по значку:

Появится поле:
По оси Y записываем Kр/ Tи, а по оси X – Tи. Получим график:
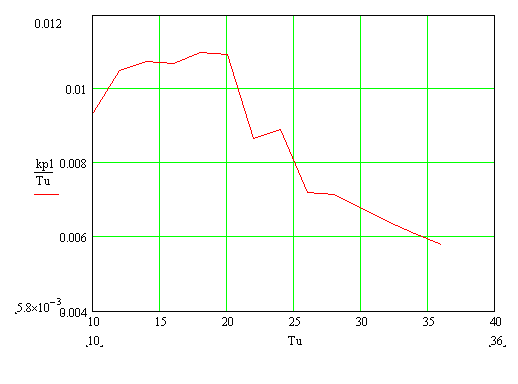
Как видно из графика Kp=0,198 и Ти=18.
3.6. Построение кривой переходного процесса
3.6.1.Записываем z – передаточную функцию замкнутой системы с найденными оптимальными параметрами.
Разомкнутая система имеет передаточную функцию
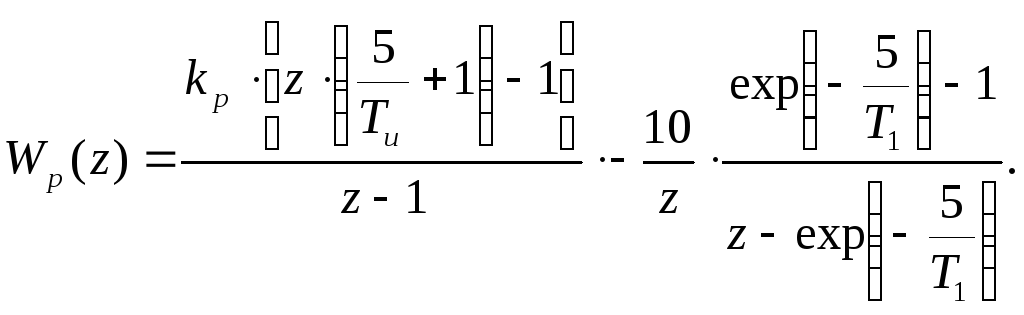 .
.
Вместо параметров Kр и Tи подставляем найденные оптимальные Kp=0,198 и Ти=18 и получим:
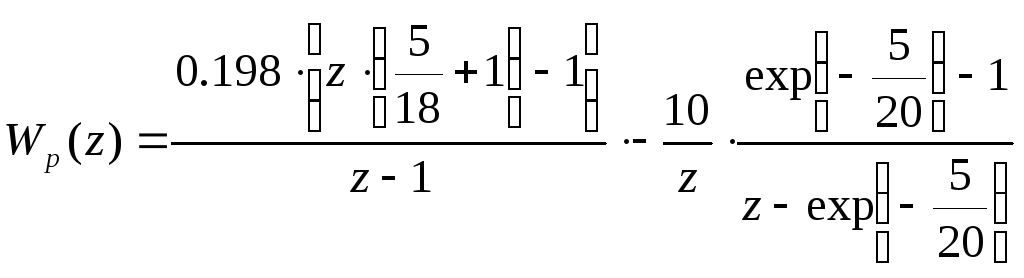 .
.
.
Для упрощения выражения выделяем его следующим образом:
заходим в пункт меню «Символика» и нажимаем «Расширить» и получаем:
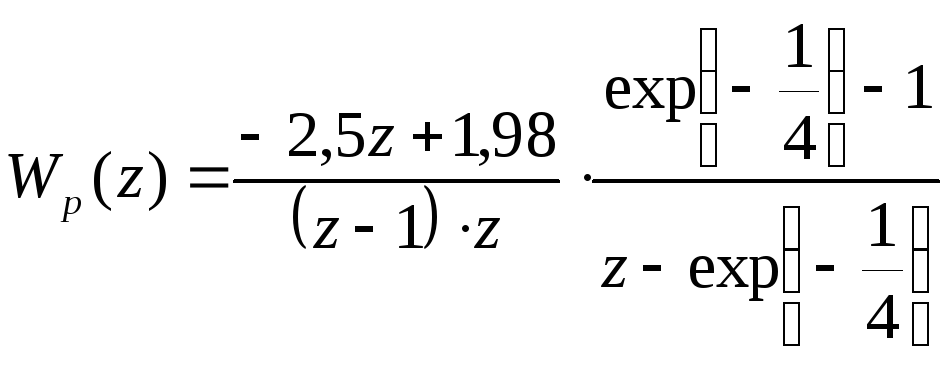 .
.
Далее находим передаточную функцию замкнутой системы
![]() .
.
Упростим полученное выражение:
![]() .
.
3.6.2. Записываем z – изображение реакции на единичное воздействие.
![]()
![]() ,
,
![]() .
.
Упростим полученное выражение:
![]() .
.
Замечание. Для работы с греческим алфавитом необходимо воспользоваться панелью инструментов «Greek».
3.6.3. Производим деление числителя полученного выражения на знаменатель.
 .
.
Далее, необходимо первый член знаменателя помножить на такое число, при котором разность с первым членом числителя даст 0. Полученное значение по очереди умножаем на весь знаменатель.

Продолжаем так до z-10.
3.6.4. Находим оригинал выходной характеристики.
Для этого полученное выражение выделяем и в панели инструментов «Symbolic» нажимаем на иконку:
Получим:
В красный квадрат вставляем z и нажимаем Enter. Получим выражение для переходной характеристики:
C0 + C1ּ1(t-T) + C2ּ1(t-2T) + C3ּ1(t-3T) + C4ּ1(t-4T) +…+ Cnּ1(t-nT)
где Сn – высота столбика;
n – номер столбика в переходной характеристике.
По полученной переходной характеристике определяются прямые показатели качества.
3.7. Оценка косвенных показателей качества
3.7.1. Качество регулирования можно оценивать не только по прямым показателям, вычисляемым по переходной характеристики, но и по косвенным показателям, вычисляемым по частотным характеристикам.
3.7.2.
Находим модуль:![]() .
.
Строим
график, находим наибольшее значение и
сравниваем Мдоп,
если М<Мдоп,расчёт
закончен, если М>Мдоп,
расчет повторяется, при этом меняется
либо интервал Ти,
либо изменяется закон регулирования.
Для правильного построения графика
необходимо задать значения ω и шаг. В
данном случае![]() , где 6 – это
шаг, а (0; 100) пределы изменения ω.
, где 6 – это
шаг, а (0; 100) пределы изменения ω.
![]() ,
,
М=1, Мдоп≥M, расчет закончен.
3.8. Оценка прямых показателей качества
По переходной характеристике определяем прямые показатели качества.
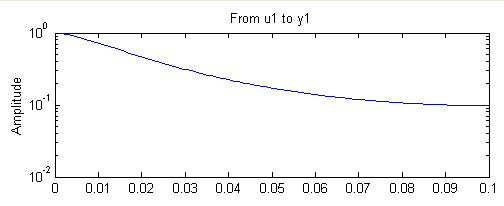
Для построения переходной характеристики можно перейти в программу Matlab и записать z – передаточную функцию замкнутой системы
sys1=tf([0.216 -0.18],[1 -1.82 0.82 0],5)
sys2=feedback(sys1,1)
step(sys2)

1) Находим значение перерегулирования:
В данном случае перерегулирование отсутствует.
2) Задается погрешность Δ=0,05 (для технических расчетов достаточная точность) и строятся две параллельные прямые от hуст на расстоянии +(-) 0,05hуст.
Время регулирования – такое значение времени, по истечении которого h(t) не выходит за отмеченные пределы. В данном случае tp=43с.
Сравнивая полученные показатели качества с заданными, можем сделать вывод, что они являются оптимальными.