

Тема 9_Система управления
.doc

Сервокомпенсатор по размерам и конструкции аналогичен триммеру, но летчиком не управляется. Он отклоняется автоматически при отклонении руля за счет кинематической связи тягой с неподвижной точкой на конструкции, к которой подвешен руль. Отклонение сервокомпенсатора в противоположную рулю сторону уменьшает его шарнирный момент.

Такой сервокомпенсатор работает по углу отклонения руля, что иногда может привести к перекомпенсации и слишком малым усилиям управления. Более совершенным является пружинный сервокомпенсатор.

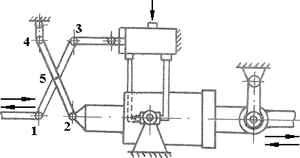
Сервокомпенсатор 1 тягой 2 соединен с двуплечим рычагом 3, к которому присоединена тяга управления 4 от командного рычага летчика. Рычаг 3 имеет возможность вращаться относительно оси 0, которая одновременно является и осью рулевой поверхности. Второе плечо рычага 3 зажато пружинами 5, имеющих предварительную затяжку. Пока усилие в тяге 4 не превышает усилия предварительной затяжки пружин, двуплечий рычаг 3 вращаться не будет и компенсатор 1 не работает - он отклоняется одновременно с рулем.Когда же усилие на руле превысит усилие затяжки пружин, рычаг 3 повернется и отклонит сервокомпенсатор относительно руля, уменьшая при этом шарнирный момент руля. Разгрузка, создаваемая пружинным сервокомпенсатором, пропорциональна не углу отклонения руля, а усилию в системе управления, что обеспечивает снижение максимальных усилий на любых режимах полета.

Другим принципом снижения усилий управления является уменьшение размеров руля без снижения эффективности управления. Этот принцип используется в системах управления с серворулями, в системах управления с интерцепторами, в системах продольного управления с подвижным стабилизатором.
В системах управления с серворулями летчик командными рычагами отклоняет вспомогательную поверхность - серворуль, который подвешен шарнирно в хвостовой части основного руля.

Его размеры в несколько раз меньше основного руля. Он отклоняется в сторону, противоположную по отношению к отклонению основного руля, который свободно закреплен на своей оси вращения. При отклонении серворуля возникающее на нем усилие Рср отклоняет руль в противоположную сторону до тех пор, пока не уравновесятся моменты Рср · b = Рр · с .
За счет разницы плеч "b" и "с" усилие на руле получается значительно больше усилия на серворуле, что и обеспечивает нужное движение самолета. Летчик на командном рычаге ощущает усилие от серворуля малых размеров. Основным недостатком такого управления является некоторое запаздывание в отклонении и работе основного руля.
Система управления с интерцепторами использует комбинацию интерцепторов с элеронами уменьшенных размеров, что обеспечивает снижение усилий управления. Интерцепторы отклоняются дополнительным приводом и их отклонение не влияет на усилия на штурвале. Отклонение интерцепторов повышает эффективность поперечного управления и компенсирует ее потери из-за уменьшения размеров элеронов.
Система управления с подвижным стабилизатором позволяет уменьшать размеры руля высоты и снижать усилия на его отклонение, а требуемая эффективность продольного управления на взлете и посадке обеспечивается перестановкой стабилизатора на меньший угол атаки. Угол отклонения стабилизатора изменяется дополнительным приводом, и летчик усилий на его отклонение не затрачивает.
Все перечисленные способы снижения усилий управления обеспечивают получение приемлемых усилий лишь на умеренных дозвуковых скоростях полета и у самолетов небольших размеров. На тяжелых и сверхзвуковых самолетах добиться нужных усилий управления можно лишь путем подвода в систему управления дополнительной энергии с помощью специальных усилителей - бустеров, которые частично или полностью воспринимают усилия от шарнирных моментов рулей.
Системы бустерного управления.
Система состоит из источника энергии, распределительного устройства , исполнительного механизма и обратной связи, передающей сигнал с выхода исполнительного механизма на вход распределительного устройства.

Три последних элемента выполняются в виде единого агрегата, называемого бустером и включаемого в проводку управления самолета между командным рычагом и рулем.
В качестве энергетической системы обычно используется гидросистема с постоянным рабочим давлением po. Поэтому иногда бустер называют гидроусилителем.
Основные элементы бустера.
Бустер состоит из распределительного устройства, исполнительного механизма и обратной связи.
Распределительное устройство представляет собой трехпозиционный четырехходовый цилиндрический или плоский золотниковый механизм с положительным перекрытием "с".

Плунжер золотника 1 через проводку управления перемещается командным рычагом летчика влево или вправо и открывает рабочие окна 5 в гильзе 2 (первая или вторая позиции золотника). Через одно окно жидкость из напорной магистрали 3 подается к исполнительному механизму, а через другое окно - жидкость от исполнительного механизма идет на слив. При перемещении золотника в другую сторону движение жидкости в окнах 5 меняется на обратное. Это обеспечивает движение исполнительного механизма в обе стороны.
При нейтральном положении золотника (3-я позиция) рабочие окна перекрываются рабочими поясками 4, обеспечивая фиксацию исполнительного механизма и руля в заданном положении.
В последнее время все более широкое применение находят золотники плоские, которые отличаются простотой изготовления и большей надежностью в работе по сравнению с золотниками цилиндрическими.

Такой золотник состоит из опорной плиты (I), плоского золотника (II), прижимной плиты (III) и пружин (IV), прижимающих золотник к опорной плите. Опорная плита неподвижна и имеет пять каналов: 1 - напорная магистраль; 2,4 - магистрали к исполнительному механизму; 3,5 - сливные магистрали.
Подвижный плоский золотник с помощью тяги (V) перемещается летчиком (или приводом автоматической системы управления), открывая рабочие окна 2 и 4. Жидкость из напорной магистрали направляется в одну из рабочих полостей исполнительного механизма, а вторая его полость сообщается со сливом, что обеспечивает перемещение штока исполнительного механизма в ту или иную стороны. При нейтральном положении золотника обеспечивается фиксация исполнительного механизма в заданном положении. Рабочие окна 1 (2,4) обычно имеют прямоугольное сечение, что обеспечивает получение линейной зависимости расхода жидкости по перемещению золотника.
Ниже показана принципиальная схема поворотного плоского золотника, используемого на самолете ТУ-154.

Летчик тягой (V) поворачивает золотник (II) относительно оси 0 - 0, управляя подачей жидкости к исполнительному механизму через окна в опорной плите (I). Валик, на котором закреплен золотник, выполняет роль гибкого звена - торсиона, обеспечивающего при заклинивании золотника перемещение проводки управления (V) для передачи движения к дублирующим бустерам.
Исполнительный механизм выполняется в виде силового гидроцилиндра 1, внутри которого перемещается шток 2, 4, с поршнем 3.
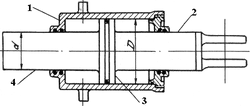
Жидкость под рабочим давлением от золотникового распределителя подается в левую или правую рабочие полости цилиндра и перемещает шток в ту или иную сторону. Противоположная полость в это время сообщается со сливом. Рабочий шток 2 соединяется непосредственно или через проводку управления с рулем. Ложный шток 4 обеспечивает равенство рабочих площадей поршня с обеих его сторон, что дает равные усилия и скорости движения штока в левую и в правую стороны. Иногда используются дифференциальные силовые цилиндры без ложного штока, что дает выигрыш в массе исполнительного механизма. В этом цилиндре полость со стороны штока всегда соединена с напорной магистралью и давление в ней в процессе работы не меняется.

Левая полость золотниковым распределителем сообщается либо с напорной магистралью , либо со сливом. В первом случае шток движется вправо (усилие на поршне слева больше, чем усилие справа), а во втором случае - влево (сила на штоке создается давлением жидкости на кольцевую площадь поршня справа. Равенство усилий при движении в обе стороны обеспечивается только при соотношении диаметров поршня и штока . В этом случае площадь поршня слева в два раза больше кольцевой площади справа, что и обеспечивает одинаковые усилия в ту и другую стороны.
Обратная связь обеспечивает получение следящей системы, при которой руль строго следит за перемещениями командного рычага летчика, выдерживая требуемый коэффициент передачи по перемещениям .Для получения следящей системы обратная связь должна быть отрицательной и жесткой.
Отрицательность обратной связи означает то, что при движении штока или цилиндра исполнительного механизма должно происходить закрытие рабочих окон в золотниковом механизме. Жесткость обратной связи обеспечивает прямую (линейную) пропорциональность закрытия окон по перемещению исполнительного механизма.
Самый простой способ получения обратной связи обеспечивается закреплением гильзы золотникового механизма на штоке (а), внутри которого проложены каналы от рабочих окон к рабочим полостям силового цилиндра. Иногда гильза золотника размещается внутри штока (б).
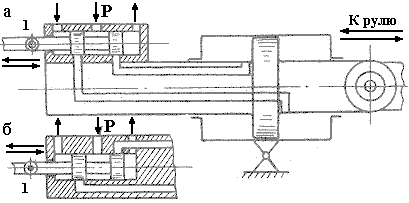
Управляющая тяга от летчика подходит к золотнику в точке 1. Ее перемещения открывают рабочие окна и вызывают перемещение штока вместе с гильзой. Шток с некоторым отставанием движется в ту же сторону, что и золотник. В конце движения , когда золотник останавливается, происходит полное закрытие рабочих окон и фиксация штока в новом положении. Перемещение штока копирует перемещение золотника, что и обеспечивает слежение руля за командным рычагом.
Более совершенный способ создания обратной связи обеспечивается установкой на входе в бустер дифференциальной качалки обратной связи.

В этом случае (а) перемещение управляющей тяги 1 поворачивает дифференциальную качалку относительно точки 2 и двигает золотник, который перемещается на величину большую, чем перемещение тяги, что ускоряет открытие окон и ускоряет движение штока, т.е. повышает быстродействие бустера. В конце движения точка 1 останавливается, и дифференциальная качалка поворачивается в обратную сторону до вертикального ее положения и закрытия рабочих окон. При этом закрытие рабочих окон происходит за счет встречного движения золотника и гильзы - т.е. ускорено. Это также повышает быстродействие бустера. Дифференциальная качалка может и замедлять работу золотникового механизма. Такое замедление может использоваться для устранения автоколебаний бустера. Замедленная работа золотникового механизма возможна в том случае, когда плечо l1 меньше l2. Кроме того, для устранения автоколебаний бустера иногда используют гидравлическое демпфирование золотника.
Возможны и другие способы получения обратной связи, например, через рычажную систему, работу которой предлагается разобрать самостоятельно.
Способы включения бустера в систему управления.
Подводимая к бустеру от гидросистемы энергия позволяет при незначительных усилиях, затрачиваемых на преодоление сил трения в золотниковом механизме, получать любые нужные нам усилия на штоке бустера, обеспечивая отклонение руля при любых по величине и по знаку шарнирных моментах. Это свойство бустера можно использовать для формирования на командных рычагах летчика нормируемых усилий управления при любых размерах руля и любых скоростях полета.
Возможны два способа включения бустера в проводку управления - по обратимой или необратимой схеме.
Автоматизация систем управления самолетом.
Управление полетом современного самолета обеспечивается пилотом и специальными автоматическими системами, служащими для облегчения пилотирования, улучшения качества управления и повышения эффективности применения самолетов.
Обеспечение безопасности полетов современных самолетов требует проведения целого комплекса мероприятий, невозможных без их автоматизации. Например, сигнализации пилоту и автоматическое ограничение перемещений органов управления при выходе самолета на предельно допустимые в полете режимы (по V, M, вертикальным перегрузкам, углам атаки, крена и скольжения) с помощью, так называемых автоматов опасных режимов полета.
Специальные устройства системы управления улучшают характеристики устойчивости и управляемости самолета, особенно на больших высотах полета. С увеличением высоты полета и при сохранении скорости полета ухудшается ответная реакция самолета на отклонение рулей. Это затрудняет пилотирование самолета, ухудшает характеристики его устойчивости, ослабляет эффект затухания колебаний самолета. Пилот, пытаясь парировать возникшие колебания, может усилить их. Поэтому в цепи управления устанавливают специальные автоматы демпфирования и стабилизации полета, которые автоматически, без участия пилота, воздействуют на рулевые поверхности, отклоняя их так, чтобы улучшить эти характеристики.
Исполнительные механизмы таких автоматов часто выполняют в виде раздвижных тяг. Длина такой тяги автоматически изменяется при перемещении ее штока в зависимости от поведения самолета, оцениваемого чувствительным устройством (например, датчиками угловых скоростей вращения самолета, датчиками линейных ускорений и т.п.).
Управление двигателями современного самолета тоже должно быть автоматизировано. Точное соблюдение заданной траектории полета требует точного выдерживания скорости полета, а управление скоростью полета осуществляется автоматом тяги двигателей.
В связи с тем, что крылья современных сверхзвуковых самолетов имеют небольшую толщину, их жесткость оказывается относительно небольшой. Поэтому в полете могут возникнуть нежелательные упругие деформации конструкции, возможно возникновение опасных колебаний. Поэтому в систему управления самолетом включают специальные автоматы, предотвращающие возникновение излишних упругих деформаций, а также парирующие нежелательные колебания конструкции самолета, например, активно борющиеся с флаттером и др.
По этим причинам в систему управления современным самолетом включают специальную систему автоматического управления (САУ), обеспечивающую без участия пилота или под его контролем выполнение следующих функций:
- пилотирование самолета по заданному заранее или рассчитанному в полете маршруту, на заданной высоте и с заданной скоростью (автопилот);
- улучшение характеристик устойчивости и управляемости самолета (демпферы);
- управление двигателями (автомат тяги);
- повышение безопасности полета и эффективности применения самолета.
Рулевые машинки автопилота имеют прямое подключение в проводку управления, обеспечивая согласованное отклонение элементов управления и рычагов управления. Приводы демпферов имеют дифференциальное подключение в проводку управления, при котором отклоняются только элементы управления без отклонения рычагов управления. В этом случае контроль производится по индикаторам положения рулей и элеронов, а иногда и по индикаторам усилий на выходе рулевых машинок.
Современная САУ представляет очень собой сложный комплекс устройств, одним из звеньев которого является автопилот. Например, САУ современного сверхзвукового самолета включает следующие подсистемы:
- повышения устойчивости самолета;
- балансировки самолета по углу тангажа;
- стабилизации угловых движений и траекторного управления (разворотов, навигации и посадки);
- автоматического управления тягой двигателей;
- полуавтоматического управления (при пилотировании самолета пилотом);
- вычисления командных сигналов для взлета и ухода на второй круг.
Системы автоматической всепогодной посадки устроены так, что они объединяют сигналы радионаведения в автопилоте.
На всех этапах захода на посадку и посадки сигналы наведения поступают от курсо-глиссадных маяков и от высотного радиовысотомера, измеряющего высоту полёта во время выравнивания перед посадкой. Воздушной скоростью самолёта управляют с помощью автомата тяги.
Стопорение рулей и элеронов.
Во время стоянки на земле рули и элероны стопорятся с целью исключения их колебаний от ветровых нагрузок.
Чаще всего для стопорения рулей и элеронов используется механическая система непосредственного управления или электромеханическая система дистанционного управления, заканчивающаяся реверсивными электродвигателями с механизмом стопорения.
Принцип действия системы стопорения сводится к защемлению рулей и элеронов относительно планера. Для этого на рулях (элементах проводки управления) имеются гнёзда, в которые входят стопоры механизмов. Руль направления и элероны стопорятся в нейтральном положении или в положении правого крена, а руль высоты - в нижнем положении, что обеспечивает уменьшение кабрирующего момента при сильном ветре и страхует от самопроизвольного стопорения в полёте. Механизм стопорения благодаря конусу наконечника и дополнительной пружине позволяет ставить рычаг управления в положение "Застопорено" независимо от положения руля и элеронов. Последующее перемещение рулей и элеронов приводит к самостопорению.
При штормовом предупреждении стопорение рулей и элеронов производится с помощью струбцин. На некоторых самолётах с бустерной системой управления рули и элероны автоматически стопорятся рулевыми приводами.