

Виконання роботи
3. Заміряти інструментальні похибки в контрольованих точках моделі узагальненої системи керування:
Таблиця 1
Інструментальні похибки
|
при ненатисненій кнопці „Пуск” | |||||||||
|
1 |
G |
E |
|
R |
|
U |
V |
L |
І |
|
0,02 |
-0,09 |
0 |
0 |
-0,3 |
0,4 |
-0,1 |
0,2 |
0 | |
|
при натнсненій кнопці „Пуск” | |||||||||
|
2 |
G |
E |
|
R |
|
U |
V |
L |
І |
|
0 |
-0,1 |
0 |
0 |
-0,3 |
0,29 |
-0,3 |
0 |
0 | |
4. Дослідити різні види задавального діяння системи керування:
С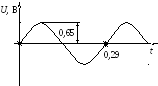 инусоїдний
сигнал
инусоїдний
сигнал
Тmin = 0,29 с
Тmax = 2,9·10-3·50 = 0,145 c
Umin = 50·10·10-3·1,3 = 0,65 B
Umax = 2,6·10·50·10-3 = 1,3 B
Fmin = 3,44 c-1
Fmax = 6,89 c-1
Прямокутний сигнал
Тmin = 3·0,1 = 0,3 с
Тmax = 2,1·0,1 = 0,21 c
Umin = 20·10-2·1,2 = 0,24 B
Umax = 2·50·10-2 = 1 B
Fmin = 3,33 c-1
Fmax = 4,76 c-1
С игнал
трикутної форми
игнал
трикутної форми
Тmin = 3,1·0,1 = 0,31 с
Тmax = 1,3·0,1 = 0,13 c
Umin = 0,9·50·10-2 = 0,45 B
Umax = 2 B
Fmin = 3,22 c-1
Fmax = 7,69 c-1
 Таблиця
2
Таблиця
2
Значення періодів і частот
|
Період/частота |
Форма сигналу | ||
|
sin |
Трикутний сигнал |
Прямокутний сигнал | |
|
Тmin, с |
0,29 |
0,31 |
0,3 |
|
Тmax, с |
0,145 |
0,13 |
0,21 |
|
Fmin, с-1 |
3,44 |
3,22 |
3,33 |
|
Fmax, с-1 |
6,89 |
7,69 |
4,76 |
6. Здійснити проходження сигналу через ланки прямого каналу розімкненої системи керування:

1-й канал т. G = 5 В;
2-й
канал
т.
![]() =
5 В;
(Ке)
=
5 В;
(Ке)
2-й
канал
т.
![]() =
5 В;
(Кr)
=
5 В;
(Кr)
2-й канал т. U = 5 В; (Ку)
2-й канал т. L = 5 В; (Кі)
7. Визначити верхні межі діапазонів задання статичних коефіцієнтів передач ланок моделі узагальненої системи керування ПІД-р та ПД-p:
Таблиця 3
Таблиця статичних коефіцієнтів передаточних ланок ПІД-р, ПД-р.
|
ПІД-р |
ПД-р | ||
|
U, В |
Ке |
U, В |
Кr |
|
|
2 |
|
7 |
|
|
| ||

Висновок: вивчили роботу універсального лабораторного стенду САУ-21ТК та способи задання основних параметрів ланок моделі системи керування, навчилися експериментально задавати і вимірювати статичні коефіцієнти передачі ланок моделі системи керування.
1