

Задачи для самостоятельного решения
х
|
1) |
|
|
2) |
|
|
3) |
|
|
4) |
|
|
5) |
|
|
6) |
|
|
7) |
|
|
8) |
|
|
9) |
|
|
10) |
|
|
11) |
|
|
12) |
|
|
13) |
|
|
14) |
|
|
15) |
|
|
16) |
|
|
17) |
|
|
18) |
|
|
19) |
|
|
20) |
|
|
21) |
|
|
22) |
|
|
23) |
|
|
24) |
|
























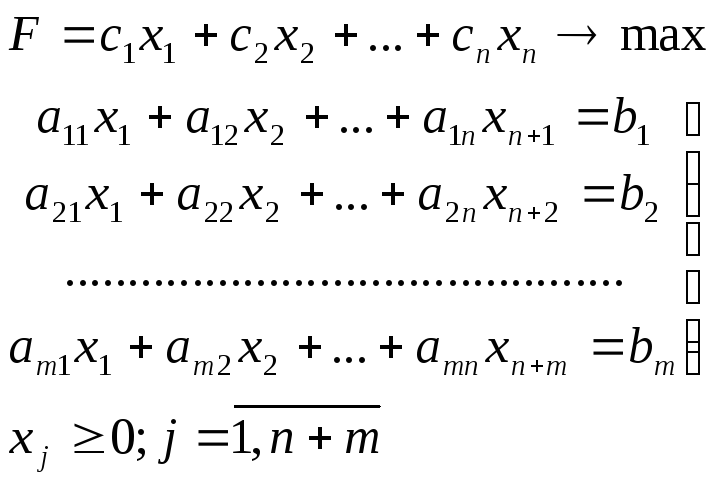
IV Основные свойства злп
Рассмотрим каноническую ЗЛП (1.4) в векторной форме (1.6).
План Х=(х1, х2, …х3)называется опорным планом ЗЛП, если система векторов
 ,входящих в разложение
,входящих в разложение
 с неотрицательными коэффициентамиxj,
линейно независима, т.к. векторы
с неотрицательными коэффициентамиxj,
линейно независима, т.к. векторы
 являютсяm-мерными, то число
положительных компонент не может быть
больше, чемm.
являютсяm-мерными, то число
положительных компонент не может быть
больше, чемm.Опорный план называется невырожденным, если он содержит ровноmположительных компонент, в противном случае он называетсявырожденным.
Отрезком в n-мерном пространстве евклидовом пространствеRn, соединяющем точкиХ(1) иХ(2)называется множество точек, удовлетворяющих равенствуХ=Х(1) + Х(2), где, 0, +=1.
Множество называется выпуклым, если вместе с любыми двумя своими точками оно содержит и все точки отрезка, соединяющего эти точки.
Точка Хвыпуклого множества называется угловой, если она не может быть представлена в видеХ=Х(1) + Х(2),гдеХ(1) иХ(2)принадлежат данному множеству.
Теорема 1. Множество планов ЗЛП является выпуклым, если оно не пусто.
непустое множество планов ЗЛП называется многогранником решений,а всякая угловая точка многогранника решений –вершиной.
Теорема 2.Если ЗЛП имеет оптимальный план, то максимальное значение целевая функция задачи принимает в одной из вершин многогранника решений. Если максимальное значение целевая функция принимает его во всякой точке отрезка, соединяющего эти вершины.
Теорема
3.Если система векторов![]() (kn)
в разложении
(kn)
в разложении![]() линейно независима и такова, что
линейно независима и такова, что
![]() ,
,
где все xj, то точкаХ=(х1, х2, …, xk, 0, …,0)является вершиной многогранника решений.
Теорема
4.ЕслиХ=(х1,
х2,
…, xn
) – вершина многогранника решений,
то векторы
![]() ,
соответствующие положительнымxjлинейно независимы.
,
соответствующие положительнымxjлинейно независимы.
V Симплекс-метод решения злп
Рассмотрим стандартную ЗЛП

Вводя дополнительные переменные хn+1, хn+2, …, xn+m приводим задачу к каноническому виду:
 (1.9)
(1.9)
Симлекс-метод основан на переходе от одного опорного плана к другому, при котором значение целевой функции возрастает. Система (1.9) содержит mуравнений и n+mнеизвестных. Выбранныеmнеизвестных называютсябазисными, а остальные – свободными (равными нулю). Систему (1.9) запишем в векторной форме:
![]() (1.11)
(1.11)
где
 ;
…
;
… ;
; ;…
;… ,
,
В качестве
опорного выбирается план Х=(0,
…, 0, b1,
b2,
…, bm), определяемый системой единичных
векторов![]() ,
которые образуют базисm-мерного
пространства.
,
которые образуют базисm-мерного
пространства.
Переход от одного опорного плана к другому осуществляется с помощью оценки вектора.
Оценкой
вектора
![]() называется
величина
называется
величина
![]() (1.12)
(1.12)
где ci– коэффициенты целевой функции при базисных переменных.
Теорема 5. (о возможности улучшения опорного плана).
Если для
данного опорного плана (решения), есть
такая отрицательная оценка S,
что среди координат вектора
![]() в
данном базисе (то есть среди чиселаks
k=1, 2, …, m) есть положительные, то
базис, которому соответствует лучшее
опорное решение, получим, заменив
вектором
в
данном базисе (то есть среди чиселаks
k=1, 2, …, m) есть положительные, то
базис, которому соответствует лучшее
опорное решение, получим, заменив
вектором
![]() тот
вектор
тот
вектор![]() исходного
базиса, для которогоаrs>0,причем
исходного
базиса, для которогоаrs>0,причем![]() для всех аis>0,
(ir)
.
для всех аis>0,
(ir)
.
Теорема 6. (критерий оптимальности опорного решения).
Если для
данного опорного решения все оценки
![]() неотрицательны, то это решение оптимально.
неотрицательны, то это решение оптимально.
Теорема 7.(признак неограниченности целевой функции).
Если для
какого-нибудь опорного решения существует
хотя бы одна оценка s<0такая, что для нее всеais0![]() ,
то это означает, что целевая функция
данной задачи не ограничена сверху на
допустимом множестве.
,
то это означает, что целевая функция
данной задачи не ограничена сверху на
допустимом множестве.
Исследование опорного плана на оптимальность, а также дальнейший вычислительный процесс удобнее вести, составив симплексную таблицу 1.1.
Таблица 1.1
|
i |
Базис |
Сб |
Ао |
С1 |
С2 |
… |
Сr |
…
|
Сn |
Cn+1 |
…
|
Се |
…
|
C n+m |
|
|
|
|
|
А1
|
А2 |
… |
Аr |
…
|
Аn |
Аn+1 |
…
|
Ае |
…
|
А n+m |
|
1 |
Аn+1 |
Cn+1 |
b1 |
a11 |
a12 |
… |
a1r |
… |
a1n |
1 |
… |
0 |
… |
0 |
|
2 |
Аn+2 |
Cn+2 |
b2 |
a21 |
a22 |
… |
a2r |
… |
a1n |
0 |
… |
0 |
… |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
Аn+r |
Cn+r |
br |
ar1 |
ar2 |
… |
arr |
… |
arn |
0 |
… |
1 |
… |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
Аn+m |
Cn+m |
bm |
am1 |
am2 |
… |
amr |
… |
amn |
0 |
… |
0 |
… |
1 |
|
m+1 |
|
|
F0 |
∆1 |
∆2 |
|
∆r |
|
∆n |
∆n+1 |
… |
∆e |
… |
∆n+m |
В столбце Сб той таблицы записываются коэффициенты при неизвестных целевой функции, имеющей те же индексы, что и векторы данного базиса.
В столбце А0 записываются положительные компоненты исходного плана. В нем же в результате вычислений получают положительные компоненты оптимального плана.
Первые mстрок определяются исходными данными задачи, а показатели(т+1)-й строки вычисляют.
f0 -значение целевой функции, которое она принимает при данном опорном плане.

 (1.13)
(1.13)
После заполнения таблицы исходный опорный план проверяют на оптимальность. Здесь возможен один из трех случаев:
1.
Если все
![]() неотрицательные, то и найденный опорный
план оптимален.
неотрицательные, то и найденный опорный
план оптимален.
2.
![]() <0для некоторогоj,и все соответствующие этому индексу
<0для некоторогоj,и все соответствующие этому индексу
величины
aij
![]() (i=
(i=![]() ).В этом случае целевая функция не
ограничена сверху на множестве планов,
поэтому задача неразрешима.
).В этом случае целевая функция не
ограничена сверху на множестве планов,
поэтому задача неразрешима.
3.
![]() <0для некоторых индексов j, и для
каждого такого по крайней мере одно из
чиселаijположительно. В этом случае можно перейти
от исходного плана к опорному плану,
при котором значение целевой функции
увеличивается.
<0для некоторых индексов j, и для
каждого такого по крайней мере одно из
чиселаijположительно. В этом случае можно перейти
от исходного плана к опорному плану,
при котором значение целевой функции
увеличивается.
Переход от одного
опорного плана к другому осуществляется
выводом из исходного базиса какого-нибудь
из векторов и введением в него нового
вектора. В качестве вектора, вводимого
в базис, можно взять любой из векторов
Аj,
для которого
![]() <0.
<0.
Для определенности
выбираем Рjс наибольшим
по абсолютной величине отрицательным
числом![]() .
Пусть это будет приj=s. Тогда в базис
вводится вектор
.
Пусть это будет приj=s. Тогда в базис
вводится вектор![]() .
.
Для определения вектора подлежащего исключению из базиса, находят min(bi/ais)для всехais >0.Пусть этот минимум достигается приi=r.Тогда из базиса исключают векторAn+г числоаrsназываютразрешающим элементом.
Столбец и строку, на пересечении которых находится разрешающий элемент, называют направляющими. После выделения направляющей строки и направляющего столбца находят новый опорный план, компоненты которого вычисляются по формулам:
b'i
=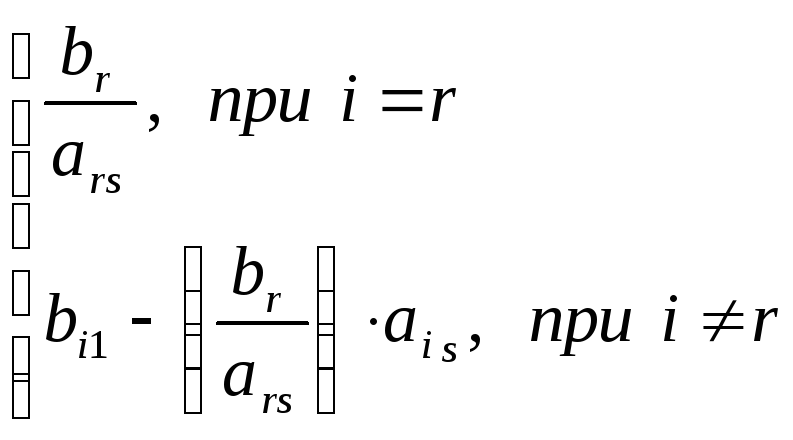 (1.14)
(1.14)
и коэффициенты
a'ij
=  (1.15)
(1.15)
После этого составляют новую симплексную таблицу и вычисляют элементы (m+1)-й строкиF'0и Δj´ по формулам (1.13), в которых все элементы берутся из новой таблицы. Полученный новый опорный план проверяется на оптимальность по знакамΔj. Процесс составления новых планов продолжается до получения оптимального плана или до выяснения неразрешимости задачи.
Пример.Для изготовления различных изделийА, В иСпредприятие использует три различных вида сырья. Нормы расхода на производство одного изделия каждого вида, цена одного изделияА, В иС, а также общего количества сырья каждого вида, которое может быть использовано предприятием, приведены в таблице 1.2.
Таблица 1.2.
|
Вид сырья |
Нормы затрат сырья, кг |
Общее кол-во сырья, кг | ||
|
А |
В |
С | ||
|
I |
18 |
15 |
12 |
360 |
|
II |
6 |
4 |
8 |
192 |
|
III |
5 |
3 |
3 |
180 |
|
Цена одного изд. |
9 |
10 |
16 |
|
Изделия А, В и С могут производиться в любых отношениях, но производство ограничено выделенным предприятию сырьем для каждого вида.
Составить план производства изделий, при котором общая стоимость всей произведенной предприятием продукции является максимальной.
Решение.Обозначим искомый выпуск изделий А черезх1,изделий В черезх2,изделий С черезх3.
Переменные х1, х2, х3должны удовлетворять следующей системе неравенств (ввиду ограничений на выделяемый фонд сырья):
 (1.16)
(1.16)
Общая стоимость произведенной предприятием продукции:
F=9x1 +10x2+16x3(1.17)
По своему экономическому содержанию переменные х1, х2, х3могут принимать только лишь неотрицательные значения:
![]() (1.18)
(1.18)
Таким образом, приходим к следующей математической задаче: среди всех неотрицательных решений системы неравенств (1.16) требуется найти такое, при котором функция (1.17) принимает максимальное значение.
Перейдем к расширенной форме задачи линейного программирования, введя дополнительные переменные. Получим ограничения в виде равенств
1 8х1
+15x2+12х3
+ x4
= 360,
8х1
+15x2+12х3
+ x4
= 360,
6х1+ 4х2+8x3 +x5 = 192,
5x1+3х2+3хз + x6= 180.
Преобразованную систему уравнений запишем в векторной форме:
x1A1+x2A2 + x3A3 + x4A4 + x5A5 + x6A6 =A0,
где







Трехмерные единичные векторы A4, A5, A6образуют базис трехмерного векторного пространства.
Опорным является план X = (0; 0; 360; 192; 180).
Составляем симплексную таблицу и проверяем исходный план на оптимальность (таблица 1.3).
Таблица 1.3
|
i |
базис |
Сб |
A0 |
9 |
10 |
16 |
0 |
0 |
0 |
|
A1 |
A2 |
A3 |
A4 |
A5 |
A6 | ||||
|
1 |
A4 |
0 |
360 |
18 |
15 |
12 |
1 |
0 |
0 |
|
2 |
A5 |
0 |
192 |
6 |
4 |
8
8 |
0 |
1 |
0 |
|
3 |
A6 |
0 |
180 |
5 |
3 |
3 |
0 |
0 |
1 |
|
4 |
|
|
|
-9 |
10 |
-16 |
0 |
0 |
0 |
Значения 4-й строки таблицы подсчитываем по формулам (1.13).
Как видно из таблицы 1.3, значения всех основных переменных х1, х2, х3 равны нулю, а дополнительные переменные принимают свои значения в соответствии с ограничениями задачи. Эти значения переменных отвечают такому "плану", при котором ничего не производится и значение целевой функции равно нулю.
Так как максимальное
по абсолютной величине число Δjстоит в 4-й строке столбца вектора![]() ,
то в новый базис введем вектор
,
то в новый базис введем вектор![]() .
С экономической точки зрения мы
включаем в план производства изделия
С.
.
С экономической точки зрения мы
включаем в план производства изделия
С.
Определим вектор, подлежащий исключению из базиса. Для этого находим
min
(![]() )
для ai3>
0, т.е.
)
для ai3>
0, т.е.
min
(![]() )
=
)
=![]() = 24
= 24
т.е.
ограничивающим фактором для производства
изделий С является имеющийся объем
сырья 2-го вида (табл. 1.4). С учетом его
наличия предприятие может изготовить
24 изделия С. Следовательно, вектор
![]() ,
подлежит исключению из базиса. Элемент
8, стоящий на пересечении 2-й строки и
столбца вектора
,
подлежит исключению из базиса. Элемент
8, стоящий на пересечении 2-й строки и
столбца вектора![]() является разрешающим. Таким образом,
r = 2, S = 3.
является разрешающим. Таким образом,
r = 2, S = 3.
Таблица 1.4.
|
i |
базис |
Сб |
Р0 |
9 |
10 |
16 |
0 |
0 |
0 |
|
|
|
|
|
Р1 |
Р2 |
Р3 |
Р4 |
Р5 |
Р6 |
|
1 |
Р4 |
0 |
72 |
9 |
9 |
0 |
1 |
-3/2 |
0 |
|
2 |
Р3 |
16 |
24 |
3/4 |
1/2 |
1 |
0 |
1/8 |
0 |
|
3 |
Р6 |
0 |
108 |
11/4 |
3/2 |
0 |
0 |
-3/8 |
1 |
|
4 |
|
|
384 |
3 |
-2 |
0 |
0 |
2 |
0 |
Сначала заполняем
строку вектора, вновь введенного в
базис, т.е. строку, номер которой совпадает
с номером направляющей (2-й) строки.
Элементы этой строки получаются из
соответствующих элементов предыдущей
таблицы делением их на разрешающий
элемент. При этом в столбце Cбзаписываем коэффициентСз
=16, стоящий в столбце вводимого в
базис вектора![]() .
Затем заполняем элементы столбцов
для векторов, входящих в новый базис. В
этих столбцах на пересечении строк и
столбцов одноименных векторов проставляем
единицы, а все остальные элементы
полагаем равными нулю.
.
Затем заполняем элементы столбцов
для векторов, входящих в новый базис. В
этих столбцах на пересечении строк и
столбцов одноименных векторов проставляем
единицы, а все остальные элементы
полагаем равными нулю.
Остальные элементы таблицы 1.4 вычисляют по формулам (1.14), (1.15).
По окончании всех
расчетов элементов таблицы 1.4 в ней
получен новый опорный план: X=(0; 0; 24; 72; 0; 108), который тоже не является
оптимальным, поскольку в столбце вектора![]() этой строки стоит отрицательное число
-2. Значит, в базис следует ввести векторA2,т.е. в новом плане
предусмотреть выпуск изделий В.
этой строки стоит отрицательное число
-2. Значит, в базис следует ввести векторA2,т.е. в новом плане
предусмотреть выпуск изделий В.
Для нахождения вектора подлежащего исключению, определяем
min
(![]() )
дляa'ir>
0, т.е.
)
дляa'ir>
0, т.е.
min
![]() =
=![]() = 8
= 8
Следовательно,
исключению из базиса подлежит вектор
![]() .
Столбец вектора
.
Столбец вектора![]() и 1-я строка являются направляющими,
а число 9 - разрешающий элемент. Отсюда
следует, чтоr =
1, S=2.
и 1-я строка являются направляющими,
а число 9 - разрешающий элемент. Отсюда
следует, чтоr =
1, S=2.
Составляем таблицу для III итерации (таблица 1.5).
Таблица 1.5
|
i |
базис |
Сб |
A0 |
9 |
10 |
16 |
0 |
0 |
0 |
|
|
|
|
|
A1 |
A2 |
A3 |
A4 |
A5 |
A6 |
|
1 |
|
10 |
8 |
1 |
1 |
0 |
1/9 |
-1/6 |
0 |
|
2 |
|
16 |
20 |
1/4 |
0 |
1 |
-1/18 |
5/24 |
0 |
|
3 |
|
0 |
96 |
5/4 |
0 |
0 |
-1/6 |
-1/8 |
1 |
|
4 |
|
|
400 |
5 |
0 |
0 |
2/9 |
5/3 |
0 |
В таблице 1.5 сначала заполняем элементы 1-й строки, которая представляет собой строку вновь вводимого в базис вектора Р2. Элементы этой строки получаем из элементов 1-й строки таблицы 1.4 делением последних на разрешающий элемент (т.е. на 9). При этом в столбцеСбданной строки записываемС2=10.
Затем заполняем элементы столбцов вектора базиса и по формулам (1.14), (1.15) вычисляем элементы остальных столбцов. В результате получаем новый план X = (0; 8; 20; 0; 0; 96) и соответствующие значенияΔ"jиF0" .Среди чиселΔ"j нет отрицательных. Это означает, что найденный опорный план является оптимальным иFmax =400.
Следовательно оптимальный план включает в себя изготовление 8 изделий В, 20 изделий С и не предусматривает изготовление изделий вида А. При данном плане полностью используется сырье 1 и 2-го видов и остается неиспользованным 96 кг. сырья 3-го вида. Стоимость произведенной продукции равна 400 руб.
Симплекс–метод решения ЗЛП (алгоритм)




