

Функция положения. Аналог скорости. Аналог ускорения
Положение любого звена механизма может
определяться параметрами: углом
![]() относительно какой-либо координатной
оси или координатами ХК
и YК (рис.
3.12).
относительно какой-либо координатной
оси или координатами ХК
и YК (рис.
3.12).
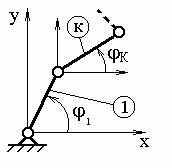
Рис. 3.12. Схема механизма
Функция положения – это
аналитическая зависимость положения
или координаты К-го звена (![]() ,
ХК или YК
) от положения ведущего звена
,
ХК или YК
) от положения ведущего звена
![]() ,
т.е.
,
т.е.
![]() или
или
![]() и
и
![]() ,
где
,
где
![]() ,
XK
и YK
– координаты, определяющие
положение К-го звена (ведомого), а
угол
,
XK
и YK
– координаты, определяющие
положение К-го звена (ведомого), а
угол
![]() – угол, характеризующий положение
ведущего звена.
– угол, характеризующий положение
ведущего звена.
Аналог скорости. Угловая скорость К-го звена определяется зависимостью
![]() ,
(3)
,
(3)
где
![]() – аналог скорости К-го звена
(первая передаточная функция) для
вращающегося звена, величина безразмерная;
– аналог скорости К-го звена
(первая передаточная функция) для
вращающегося звена, величина безразмерная;
![]() и
и
![]() –
аналоги скорости К-го звена,
движущегося поступательно, величины
безразмерные.
–
аналоги скорости К-го звена,
движущегося поступательно, величины
безразмерные.
Аналог ускорения. Угловая скорость К-го звена определяется зависимостью, получаемой дифференцированием уравнения (3) по dt:
![]() .
.
При дифференцировании предполагается,
что угловая скорость К-го звена
![]() определяется зависимостью
определяется зависимостью
![]() ,
,
а угол
![]() является функцией угла
является функцией угла
![]() :
:
![]() .
.
Величина
![]() – аналог ускорения К-го звена, совершающего
вращательное движение, величины
– аналог ускорения К-го звена, совершающего
вращательное движение, величины
![]() и
и
![]() – аналоги ускорения К-го звена,
двигающегося поступательно, в проекциях
на оси X и Y.
– аналоги ускорения К-го звена,
двигающегося поступательно, в проекциях
на оси X и Y.
Введение в кинематический анализ понятий аналогов отделяет геометрические свойства механизма от кинематических.
Величину
![]() называют ещё передаточным отношением,
так как выражение
называют ещё передаточным отношением,
так как выражение
![]() можно преобразовать, умножив и разделив
его на величину dt:
можно преобразовать, умножив и разделив
его на величину dt:
![]()
Отношение угловых скоростей в механике
называют передаточным отношением
![]() .
.
Аналог скорости звена также называют первой передаточной функцией.
Задачи кинематического анализа и пути их аналитического решения приведены в таблице.
|
Функции положения |
Задача о скоростях |
Задача об ускорения |
|
Определить функции положения:
|
Определение аналогов скоростей
Вычисление скоростей
|
Определение аналогов ускорений
Вычисление ускорений
|


Как следует из приведенной таблицы, для
решения задачи о положениях
звеньев исследуемого механизма необходимо
найти функции положения (![]() или
ХК и YК
), предварительно составив векторное
уравнение замкнутого векторного контура
кинематической цепи и уравнения проекций
его на координатные оси Х и Y.
Из этих уравнений находят функции
положения (зависимости положений
исследуемого звена от положения ведущего
звена). При известном (заданном) законе
движения ведущего звена задаются шагом
и вычисляют координаты исследуемых
звеньев (угловые координаты для
вращающегося звена и прямоугольные для
звена, совершающего возвратно-поступательное
движение).
или
ХК и YК
), предварительно составив векторное
уравнение замкнутого векторного контура
кинематической цепи и уравнения проекций
его на координатные оси Х и Y.
Из этих уравнений находят функции
положения (зависимости положений
исследуемого звена от положения ведущего
звена). При известном (заданном) законе
движения ведущего звена задаются шагом
и вычисляют координаты исследуемых
звеньев (угловые координаты для
вращающегося звена и прямоугольные для
звена, совершающего возвратно-поступательное
движение).
Для решения задачи о скоростях необходимо найти аналоги скоростей исследуемых звеньев и, умножив их на угловую скорость ведущего звена, получить формулы расчета искомых скоростей.
Для решения задачи об ускорениях находят также аналоги ускорений звеньев и по формулам, приведенным в таблице, находят величины ускорений. Ниже приводится пример кинематического анализа кривошипно-ползунного механизма аналитическим методом.
Аналитическое исследование кривошипно-ползунного механизма
Аналитическое исследование кривошипно-ползунного механизма используется в двигателях внутреннего сгорания, насосах, компрессорах.
Различают две схемы кривошипно-ползунных механизмов: нормальный или центральный кривошипно-ползунный механизм (рис.3.13, а) и дизоксиальный кривошипно-ползунный механизм (рис.3.13, б).

а) б)
Рис.3.13
Величина
![]() называется смещением дизоксиальности.
Если в дизоксиальном кривошипно-ползунном
механизме сделать смещение дизоксиальности
равным нулю, то получится нормальный
кривошипно-ползунный механизм.
называется смещением дизоксиальности.
Если в дизоксиальном кривошипно-ползунном
механизме сделать смещение дизоксиальности
равным нулю, то получится нормальный
кривошипно-ползунный механизм.
Кривошипно-ползунные механизмы предназначены для преобразования вращательного движения кривошипа в поступательное движение ползуна (насосы, компрессоры, механизмы шаговой подачи), или для преобразования возвратно-поступательного движения ползуна во вращательное движение коромысла (двигатели внутреннего сгорания).
Пример 4. Аналитическое исследование механизма с ведущим кривошипом.
Дано:
![]() ,
,
![]() ,
,
![]() ,
,
![]() (рис.3.14).
(рис.3.14).

Рис.3.14
Решение:
Скорость точки
![]() равна нулю.
равна нулю.
Модуль скорости точки
![]() можно найти по формуле:
можно найти по формуле:
![]() ,
а линия действия вектора скорости точки
,
а линия действия вектора скорости точки
![]() перпендикулярна звену
перпендикулярна звену
![]() .
.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
 ;
;
 .
.
Получили формулу:
 ,
скорость точки
,
скорость точки
![]() можно получить с помощью формулы
можно получить с помощью формулы
![]() ,
а ускорение точки
,
а ускорение точки
![]() можно получить с помощью формулы
можно получить с помощью формулы
![]() .
.
Понятия о мёртвых положениях в кривошипно-ползунных механизмах и способы их прохождения
Рассмотрим случай, когда ведущим звеном является ползун. В этом случае происходит преобразование поступательного движения ползуна во вращательное движение ползуна (рис.3.15).
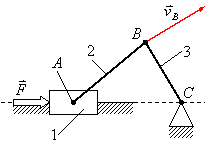
Рис.3.15
В таких механизмах, в момент, когда кривошип и шатун находятся на одной прямой, то вывести механизм из состояния неподвижности ползун не может.
Работу точки
![]() можно найти по формуле:
можно найти по формуле:
![]() .
.
На рис.3.16 угол между силой
![]() и вектором скоростью точки
и вектором скоростью точки
![]() составляет 90 градусов, следовательно
составляет 90 градусов, следовательно
![]() ,
то есть как бы не была велика сила
,
то есть как бы не была велика сила
![]() вывести механизм из этого положения
она не может.
вывести механизм из этого положения
она не может.
Положения механизма, представленные
на рис.3.16 и рис.3.17 из-за невозможности
движения под действием силы
![]() принято называть мёртвым положением.
принято называть мёртвым положением.


Рис.3.16 Рис.3.17
Существует два способа прохождения мёртвых положений: динамический и кинематический.
При динамическом методе на вал кривошипа одевается маховик.
Маховик – колесо со значительной массой, девяносто процентов которой сосредоточено в ободе этого колеса (рис.3.18).

Рис.3.18
Таким образом, маховик является аккумулятором энергии, получаемой от механизма, когда положение звеньев представляет наилучшее для работы состояние. Поскольку масса маховика значительна, то при прохождении мёртвого положения кинетическая энергия маховика проворачивает кривошип. Дальше действует сила ползуна.
Кинематический способ используется в тех случаях, когда большие массы маховиков недопустимы. Этот способ заключается в том, что кривошипы нескольких одинаковых механизмов жёстко связаны между собой образуя коленчатый вал. У этих кривошипов общая ось вращения, но расположены они под углом друг к другу, чтобы при мёртвом положении одного механизма, другой имел более благоприятное положение, и проворачивал коленчатый вал остальных механизмов. В этом случае также могут быть использованы маховики, но они будут иметь очень незначительную массу.
На рис.3.19 первый и третий механизмы находятся в мёртвых положениях, а второй и четвёртый механизмы находятся в наилучших положениях.

Рис.3.19
Пример 5.
Используем метод замкнутых векторных контуров (рис. 3.7).

Рис. 3.20. Замкнутый векторный контур кривошипно-ползунного механизма
Решение:
Рассмотрим замкнутый векторный контур OABCO. Соблюдая единообразие отсчёта углов, определяющих положение звеньев, составим векторное уравнение
![]() .
(4)
.
(4)
Спроектируем (4) на координатные оси Х и Y:
![]() (5) – (6)
(5) – (6)
Решение задачи о положениях
Определим функции положения ползуна
![]() и шатуна
и шатуна
![]() .
Из (6) получаем
.
Из (6) получаем
![]() ,
откуда
,
откуда
![]() ,
из (5) получаем
,
из (5) получаем
![]() .
.
Решение задачи о скоростях
Определим аналог скорости ползуна
![]() и
шатуна
и
шатуна
![]() ,
для чего продифференцируем уравнение
(5) и (6):
,
для чего продифференцируем уравнение
(5) и (6):
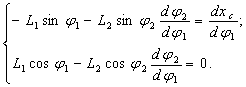 (7) - (8)
(7) - (8)
Из (8) получаем аналог скорости шатуна
 ,
,
тогда угловая скорость шатуна
![]() .
.
Из (7) получаем аналог скорости ползуна
 ,
,
тогда скорость ползуна вычисляется по
формуле
![]() .
.
Решение задачи об ускорениях
Определим аналоги ускорений шатуна
![]() и ползуна
и ползуна
![]() ,
для чего продифференцируем уравнения
по
,
для чего продифференцируем уравнения
по
![]() (7) и (8):
(7) и (8):
 (9) - (10)
(9) - (10)
Из (10) получим аналог ускорения шатуна
![]() ,
тогда угловое ускорение шатуна можно
вычислить по формуле
,
тогда угловое ускорение шатуна можно
вычислить по формуле
![]() .
.
Из (9) получим аналог ускорения ползуна
![]() ,
тогда ускорение ползуна можно вычислить
по формуле
,
тогда ускорение ползуна можно вычислить
по формуле
![]() .
.
Аналитическое исследование шарнирного четырёхзвенного механизма

Рис.3.21
При ведущем кривошипе рабочим ведомым
звеном является чаще всего коромысло
![]() (рис.3.21). Чтобы найти зависимость угла
поворота ведомого звена от ведущего
аналитическим способом пользуются
следующей формулой (рис.3.22):
(рис.3.21). Чтобы найти зависимость угла
поворота ведомого звена от ведущего
аналитическим способом пользуются
следующей формулой (рис.3.22):
 .
.

Рис.3.22
Аналитическое исследование кривошипно-кулисного механизма
Основным элементом кривошипно-кулисных механизмов является кулиса.
Кулиса – подвижная направляющая ползуна.
Кулисы бывают прямолинейные и изогнутые (рис.3.23). Конструктивно они бывают выполнены в виде стержней или рамных направляющих.

Рис.3.23
По принципу действия кривошипно-кулисные механизмы бывают следующих видов: механизмы с возвратно-поступательным вращением кулисы, механизмы с вращательным движением кулисы.
Рассмотрим механизм с поступательным вращением кулисы (рис.3.24).
1 – кривошип.
2 – ползун (камень).
3 – кулиса.
![]() ;
;
![]() ;
;
![]() .
.

Рис.3.24
Назначением таково механизма является преобразование вращательного движения кривошипа в возвратно-поступательное движение кулисы.
Кулисный механизм с вращающейся головкой (рис.3.25).

Рис.3.25
1 – кривошип.
2 – ползун.
3 – качающаяся кулиса.
Этот механизм предназначен для преобразования вращающегося движения кривошипа в колебательное или вращательное движение кулисы (рис.3.26).

Рис.3.26
Зададим
![]() .
.
![]() - угол поворота кривошипа при переходе
кулисы из крайнего правого в крайнее
левое положение.
- угол поворота кривошипа при переходе
кулисы из крайнего правого в крайнее
левое положение.
![]() - угол поворота кривошипа при переходе
кулисы из крайнего левого в крайнее
правое положение.
- угол поворота кривошипа при переходе
кулисы из крайнего левого в крайнее
правое положение.
Очевидно, что угол
![]() больше угла
больше угла
![]() .
Так как
.
Так как
![]() ,
то
,
то
![]() ,
а
,
а
![]() ;
;
![]() или
или
![]() .
Так как
.
Так как
![]() ,
то
,
то
![]() .
Это означает, что прохождения кулисы
влево и вправо различны, то есть влево
кулиса двигается медленнее, чем вправо.
.
Это означает, что прохождения кулисы
влево и вправо различны, то есть влево
кулиса двигается медленнее, чем вправо.
Средняя скорость точки
![]() :
:
![]() ;
;
![]() .
.
Путь
![]() .
.
![]() ;
;
![]() .
.
Найдём зависимость угла поворота кулисы от угла поворота кривошипа:
![]() ;
;
 .
.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Выше были рассмотрены механизмы, у
которых радиус кривошипа
![]() был меньше чем межцентровое расстояние
был меньше чем межцентровое расстояние
![]() .
В этих механизмах кулиса совершала
колебательные движения.
.
В этих механизмах кулиса совершала
колебательные движения.
Рассмотрим вариант, когда радиус
кривошипа будет больше межцентрового
расстояния
![]() (рис.3.27).
В этом случае центр вращения кулисы –
точка
(рис.3.27).
В этом случае центр вращения кулисы –
точка
![]() будет находиться внутри кривошипной
окружности, очерчиваемой шарниром
будет находиться внутри кривошипной
окружности, очерчиваемой шарниром
![]() кривошипа. Такие механизмы имеют
вращающуюся кулису.
кривошипа. Такие механизмы имеют
вращающуюся кулису.
Так как радиус
![]() величина переменная, то угловая скорость
кулисы
величина переменная, то угловая скорость
кулисы
![]() тоже будет величиной переменной. Верхнюю
часть окружности кулиса проходит
медленнее, чем нижнюю
тоже будет величиной переменной. Верхнюю
часть окружности кулиса проходит
медленнее, чем нижнюю

Рис.3.27
Вопросы для самопроверки
- Что называется "функцией положения" для звена или точки механизма?
- В чем различие между кинематическими и геометрическими характеристиками механизма?
- Какие функции называются кинематическими передаточными функциями механизма?
- Какие передаточные функции механизма называются главными, а какие вспомогательными?
- Перечислите методы геометро-кинематического исследования механизмов?
- Напишите формулы, устанавливающие связь между геометрическими и кинематическими характеристиками механизма?
- Изложите суть метода "проекций векторного контура"?
- Что называется циклом?
- Что называется "центроидой", как центроиды используются при кинематическом исследовании механизма?
- Как метод кинематических диаграмм применяется при кинематическом исследовании механизмов?
- Как применяется метод преобразования координат при решении прямой задачи о положении точки выходного звена?
- Как кинематические характеристики определяются экспериментально?
- Опишите последовательность кинематического анализа плоского механизма.
- Запишите уравнения планов скоростей и ускорений для любой структурной группы II класса, содержащей внутреннюю поступательную пару.
- Запишите уравнения планов скоростей и ускорений для любой структурной группы II класса, содержащей хотя бы одну внешнюю поступательную пару.
- Как определяют величину и направление ускорения Кориолиса?
- В каких случаях при построении планов скоростей и ускорений применяют метод подобия?
- По какому признаку можно установить, является ли равномерным (или неравномерным) относительное движение звеньев, образующих поступательную пару?
- Цель кинематического анализа механизмов.