

1 Основы теоретической и прикладной механики
Проектирование и конструирование машин – сложный наукоемкий и трудоемкий процесс.
Первой основной задачей, которую приходится решать при проектировании механизмов и машин – определение действующих нагрузок и закономерность их действия на детали и узлы. Прежде чем приступить непосредственно к проектированию объекта, необходимо определить, какие внешние нагрузки действуют на него, как взаимодействует объект с окружающими телами, какая зависимость этого взаимодействия от внешних сил. Эти вопросы рассматривается теоретической механикой, разделом «Статика».
Второй основной задачей является определение работоспособности материала и конструкции деталей под действием на них определенных ранее нагрузок. Эти вопросы рассматриваются в дисциплине «Сопротивление материалов».
Третья основная задача – определение элементов деталей, узлов и механизмов, наиболее подходящих для выполнения своих функций. Классификацией, устройством и методами расчетов этих элементов занимается дисциплина «Детали машин и основы конструирования».
1.1 Основные понятия теоретической механики
1.1.1 Основные понятия и определения
Статика – это раздел теоретической механики, в котором излагается общее учение о силах и изучаются условия равновесия материальных тел находящихся под воздействием сил.
Материальным телом называется некоторое количество вещества, которое заполняет какой-нибудь объем в пространстве. Для удобства исследования материальные тела, в зависимости от соотношения его размеров, подразделяют на стержни (брусья, балки), пластины (оболочки), массивные тела, материальные точки.
Механическим воздействием одного тела на другое называется такое воздействие, при котором пренебрегают изменениями в химической структуре тела и его физическом состоянии. Если тело испытывает механическое воздействие со стороны других материальных тел, то оно может изменять свое движение в пространстве или оставаться в покое. Механическое воздействие может происходить как при соприкосновении тел, так и на расстоянии (притяжение, отталкивание). В курсе данной дисциплины будет рассматриваться, в основном, механическое воздействие от непосредственного соприкосновения тел при сохранении состояния покоя.
Основное допущение теоретической механики: все тела считаются абсолютно жесткими, т.е. предполагается, что все внешние воздействия не приводят к деформациям (изменениям формы и размеров тела). Это допущение вводят для упрощения исследования законов равновесия тела и только на этапе определения сил, действующих на тело.
1.1.2 Сила. Система сил
Сила является мерой механического воздействия тел друг на друга. При рассмотрении работоспособности детали (узла, механизма), окружающие ее тела мысленно отбрасывают, а воздействие этих тел на деталь заменяют эквивалентными силами.
Эффект действия силы определяется тремя факторами: направлением и линией действия сил; численным значением силы; точкой приложения силы. Иными словами, сила является векторной величиной.
Линией действия силы называют прямую, проведенную по направлению силы неограниченно в обе стороны.
Численное значение силы (модуль силы) является количественной величиной. Величина силы в Международной системе единиц (СИ) измеряется в ньютонах (Н). Применяют также и более крупные единицы измерения 1 килоньютон (1 кН = 103 Н), 1 меганьютон (1 мН = 106 Н).
Силы можно складывать, используя правила векторного сложения: методом параллелограмма (рис. 1.1а) или методом треугольника (рис. 1.1б). В некоторых случаях вместо нескольких сил можно использовать в расчетах одну равнодействующую силу R.
![]()
|
| |||
|
|
а |
б |
|
|
Рис. 1.1 Векторное сложение сил | |||

Совокупность нескольких сил, приложенных к телу, называется системой сил. Если линии действия системы сил находятся в нескольких плоскостях, то такая система сил называется пространственной. Если все силы, входящие в систему находятся на одной плоскости, то такая система называется плоской.
Система сил, равнодействующая которой равна нулю, а линии действия этих сил проходят через одну точку, называется уравновешенной. При приложении к телу, находящемуся в состоянии покоя, уравновешенной системы сил, состояние покоя тела не изменится.
1.1.3 Момент пары сил
Система двух равных и параллельных сил, противоположно направленных сил (рис. 1.2), не лежащих на одной прямой называется парой сил. Равнодействующая этих сил равна нулю, но эта пара сил стремится вращать тело. Способность этой пары сил вращать тело количественно определяется моментом. Момент пары сил равен произведению одной из сил на плечо:
![]() .
.
|
|
|
Рис. 1.2 Момент пары сил |

Размерность момента в системе СИ: ньютон на метр (Н·м). В технических расчетах часто применяют размерность ньютон на миллиметр (Н·мм). В статике положительным направлением момента принято вращение против часовой стрелки.
Система моментов, действующая на тело, считается уравновешенной, если их сумма равна нулю.
1.1.4 Связи
Большинство тел не являются свободными, так как их перемещения по условиям работы должны быть ограничены. Тела, ограничивающие движение рассматриваемого тела, называются связями. При рассмотрении работы тела связи, ограничивающие его перемещение, отбрасываются и заменяются эквивалентными (по воздействию) реакциями связей.
Виды связей:
|
Контакт тела с гладкой поверхностью: реакция направлена по общей нормали к их поверхностям в точке соприкосновения. |
|
|
Контакт тела с поверхностью (с учетом сил трения): реакции разбивают на две составляющие: нормальную RN – перпендикулярно поверхности в точке соприкосновения (как при контакте с гладкой поверхностью) и касательную RT – по касательной к поверхности. |
|
|
Связь с помощью нитей (цепей, тросов): не дает телу удаляться от точки подвеса нити вдоль нити. При отбрасывании связи заменяется на реакцию, направленную вдоль нити к точке ее подвеса. |
|
|
Шарнирно–подвижная опора: ограничивает перемещение тела в одном направлении, позволяет свободно перемещаться в другом направлении и поворачиваться относительно опоры. При отбрасывании заменяется на одну реакцию, перпендикулярную плоскости перемещения. |
|
|
Шарнирно–неподвижная опора: ограничивает перемещение тела, но позволяет свободно поворачиваться относительно опоры. При отбрасывании заменяется на две реакции, параллельные осям координат. |
|
|
Жесткая заделка (жесткое защемление): не дает телу перемещаться и поворачиваться. При отбрасывании заменяется на две реакции и реактивный момент. |
|



1.1.5 Условие равновесия системы сил
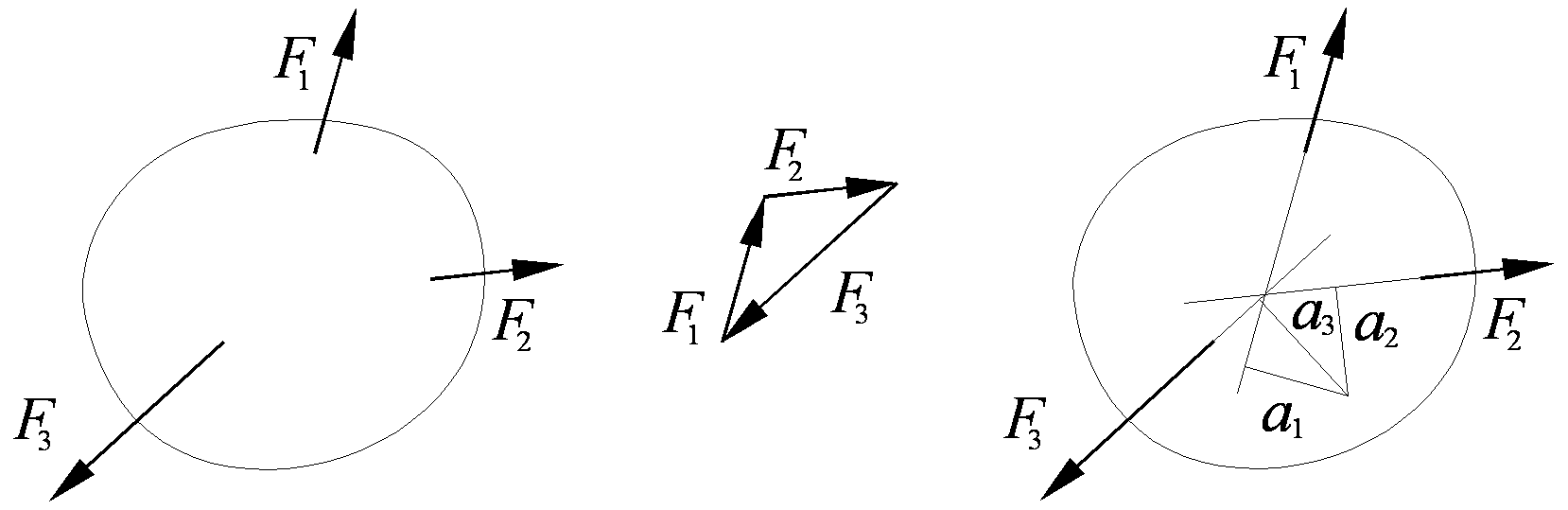
Условие равновесия системы сил (рис. 1.3): сумма всех сил, действующих на тело равна нулю (рис. 1.3б), сумма моментов, которые вызывают эти силы, относительно произвольной точки пространства равна нулю (рис. 1.3в):
![]() ;
;
![]() .
.
Для системы сил, представленной на рис. 1.3:
![]() ;
;
![]() .
.
|
| ||||
|
|
а |
б |
в |
|
|
Рис. 1.3 Условие равновесия системы сил | ||||
Если система сил, приложенная к телу, удовлетворяет условию равновесия, то тело находится в покое или движется равномерно (с нулевым ускорением) и поступательно (прямолинейно).
Для тела, которое находится в равновесии можно выполнять следующие действия:
1. К уравновешенному телу можно добавить или отбросить уравновешенную систему сил и моментов, при этом равновесие тела не изменится.
2. Силу можно перемещать вдоль линии действия, без нарушения равновесия тела.
3. Силу можно
перемещать из точки приложения в любую
точку пространства, без нарушения
равновесия, если к системе сил добавить
момент, равный величине этой силы на
расстояние между старой и новой линией
действия силы. На рис. 1.4 показана
последовательность перемещения силы.
К телу в новой точке приложения
добавляется уравновешенная система
сил, состоящая из двух сил
![]() и
и![]() ,
равных по величине и параллельных силеF.
Так как силы F
и
,
равных по величине и параллельных силеF.
Так как силы F
и
![]() образуют момент
образуют момент![]() ,
то на тело вместо силыF
действуют равная ей по величине и
направлению, но приложенная в другой
точке сила
,
то на тело вместо силыF
действуют равная ей по величине и
направлению, но приложенная в другой
точке сила
![]() и моментM.
и моментM.
|
| ||||
|
|
а |
б |
в |
|
|
Рис. 1.4 Правила перемещения силы в произвольную точку пространства | ||||

Для упрощения расчетов элементов конструкций, в большинстве случаев можно:
тело можно считать неподвижным (например, вращающиеся валы считают неподвижными);
форму тела можно упростить, т.е. свести к одной из элементарных форм тела: брус (стержень), пластина (оболочка), массивное тело простой формы;
соседние тела, ограничивающие перемещение тела представляют в виде связей, которые потом отбрасывают и заменяют на эквивалентные силы – реакции связей;
расчетную схему можно свести к плоской уравновешенной системе сил и моментов.