

8.5. Синтез систем регулирования положения
Системы регулирования положения исполнительных органов машин и механизмов имеют широчайший диапазон приложений. Они применяются для стабилизации положения различных платформ в условиях качки их оснований (системы стабилизации положения), для позиционирования схватов манипуляторов промышленных роботов, позиционирования инструментов координатно-расточных станков (позиционные программные системы регулирования положения), для механической обработки поверхности различных изделий техники токарно-фрезерными станками (контурные программные системы регулирования положения), в качестве систем наведения антенн, оптических радиотелескопов, ракет (следящие системы управления положением) и т.п. Диапазон мощностей исполнительных двигателей САР положения очень широк - от единиц ватт до единиц мегаватт.
Системы стабилизации положения, контурные и следящие САР функционируют, как правило, в режиме малых отклонений координат, т. е. их координаты не достигают предельно допустимых значений. Применительно к позиционным системам различают три режима их функционирования и, соответственно три режима перемещений:
режим малых перемещений;
режим средних перемещений;
режим больших перемещений.
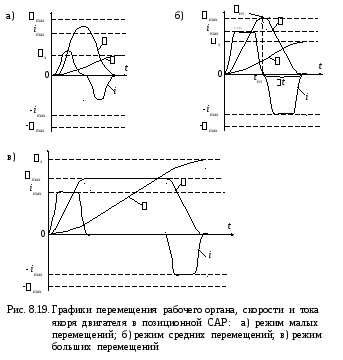
При малых перемещениях скорость двигателя не достигает рабочей
максимальной скорости (< max), ток двигателя i не достигает значения тока ограничения (i < imax). В режиме средних перемещений скорость двигателя не достигает рабочей максимальной скорости, но ток двигателя может достигать значения тока ограничения (i imax). В режиме больших перемещений скорость двигателя и ток двигателя могут достигать максимальных значений (i imax , max). Графики перемещения исполнительного органа, скорости и тока двигателя для этих режимов приведены на рис. 8.19. Заметим, что время позиционирования исполнительного органа в режиме малых перемещений является неизменным, не зависящим от величины перемещения (рис. 8.19а). САР положения при этом остается линейной. В режимах средних и больших перемещений время позиционирования зависит от величины перемещения и САР становится нелинейной (рис. 8.19 б,в).
САР положения призвана обеспечить оптимальное автоматическое перемещение исполнительного органа рабочей машины из некоторой начальной позиции в некоторую конечную. В позиционных САР траектория движения исполнительного органа не имеет существенного значения и в качестве датчиков положения часто с успехом могут использоваться дискретные датчики типа конечных выключателей. Напротив, в следящих САР, контурных СЧПУ требуется непрерывный контроль отклонения
п
Рис.
8.19. Графики переходных процессов в
позиционной САР: а)
режим малых перемещений;
б) режим средних перемещений;
в) режим больших перемещений.
В качестве датчиков положения используются сельсины, вращающиеся
трансформаторы, индуктосины, многооборотные потенциометры, импульсные, цифровые датчики и др. В ряде случаев для повышения точности работы САР контроль положения осуществляют датчиками грубого и точного отсчетов (при больших отклонениях положения от заданного значения работает система грубого отсчета, в диапазоне малых рассогласований – система точного отсчета).
В настоящем разделе будут рассмотрены нашедшие наибольшее применение аналоговые САР положения с непрерывным контролем перемещения вдоль всего пути позиционирования рабочих органов механизмов .