

Борисенко / Конспект лекций / Лекция 12
.docЛ.А. Борисенко , д-р техн. наук, проф.
ПЛАНЕТАРНЫЕ МЕХАНИЗМЫ С ГИБКИМИ СВЯЗЯМИ
Белорусско-Российский университет, Республика Беларусь
Аннотация
В статье излагаются принципы построения , элементы теории и приводится общая классификация планетарных механизмов с гибкими связями, а также некоторый опыт конструирования таких механизмов. В качестве гибких связей используются плоские, поликлиновые и зубчатые ремни, а также различные виды цепей. Это новый, неизученный класс планетарных механизмов, занимающий место в общем ряду с известными планетарными механизмами с зубчатыми колесами и волновыми передачами .
Ключевые слова: гибкая связь, планетарная передача, передаточное отношение
Специфические требования , предъявляемые к приводам мехатронных устройств , обусловливают необходимость поиска новых передаточных механизмов, осуществляющих передачу и преобразование движения от управляемых электродвигателей. В этом отношении представляет интерес изучение возможности использования нового вида механизмов - планетарных механизмов с гибкими связями (ПМГС). В передаче движения участвует большое число элементов, что вносит качественные изменения в процесс функционирования передачи. Этот класс механизмов занимает место в ряду известных планетарных механизмов с зубчатыми колесами и волновых передач. Представленный в статье материал систематизирует уже накопленный опыт создания таких механизмов.
Основные результаты исследования и разработки ПМГС изложены в статьях автора [1 , 2 , 3 , 4 ]. Предложенные схемы защищены патентами РБ [5 – 8].
Известны попытки создания передаточных механизмов, в которых используются гибкие связи , однако механизмы такого типа имеют ограниченный диапазон применения и решают частные специфические задачи. Широкое признание получили так называемые волновые передачи, которые наряду с рядом достоинств обладают определенными ограничениями. Рассматриваемый здесь планетарный механизм может быть осуществлен с диапазоном передаточных отношений 40 – 80, который нельзя реализовать в волновой передаче из-за слишком больших деформаций гибкого колеса.
В основе образования планетарного механизма с гибкой связью лежит обычная рядовая передача с гибкой связью. Способ преобразования рядового механизма с гибкой связью в планетарный аналогичен способу преобразования обычной рядовой зубчатой передачи в планетарный механизм: если стойке рядовой передачи сообщить вращение вокруг одного из колес, принятого за неподвижное, – получим планетарную передачу. На рисунке 1 показаны две схемы передач с гибкой связью – рядовая и образованная из нее планетарная передача. Если придать стойке рядовой передачи с гибкой связью вращение вокруг оси звездочки 1 , то звездочка 2 благодаря гибкой связи получит вращение, а стойка рядовой передачи с гибкой связью превращается в водило H . Далее вращение звездочки 2 , уже рассматриваемой как сателлит, следует передать выходному звену механизма.. Передаточное отношение полученной передачи определяется отношением угловой скорости водила H к угловой скорости сателлита 2.
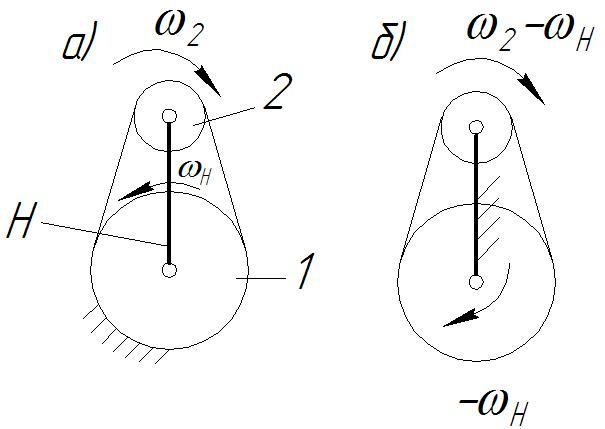
Рисунок 1 – Схема ПМГС и сопутствующей ему рядовой передачи
Эту схему можно рассматривать как нечто среднее между волновым и планетарным механизмом , По отношению к ним механизм обладает рядом полезных свойств. Автор определяет эту схему как планетарную передачу с гибкой связью. Основным активным элементом ее является гибкая связь, охватывающая примерно половину диаметра шкива и покоящаяся на нем. Этим она отличается от гибкой металлической оболочки, , используемой в волновых передачах, контактирующей только некоторой частью и непрерывно деформирующейся.
Иногда высказывается мнение, что это волновая передача с одной волной деформации. Однако, основным признаком волновой передачи, отличающим ее от планетарной, считается отсутствие звеньев с планетарным движением [10]. В рассматриваемой передаче в явном виде присутствует сателлит с планетарным движением. Кроме того в волновой передаче имеет место перемещение зубьев по высоте , в то время как в ПМГС контактирующие зубья покоятся на дуге обхвата.
ПМГС могут быть осуществлены в фрикционном варианте и в варианте с зацеплением посредством зубьев. В качестве гибких могут использовться поликлиновые и зубчатые ремни, а также зубчатые и пластинчатые цепи.
ПМГС являются альтернативой волновым передачам и отличаются от них от рядом преимуществ. ПМГС отличаются простотой устройства и широким спектром возможного применения. В ряде случаев такие передачи не требуют смазки и могут быть осуществлены с использованием высокопрочных полимерных материалов, что снижает их материалоемкость и стоимость изготовления .
Представленная на рисунке 1 схема служит для пояснения принципа образования планетарного механизма с гибкой связью и не может быть использована на практике в качестве редуктора при представленных на рисунке относительных размерах звеньев из-за большого межосевого расстояния. Суть основной идеи , защищенной патентом РБ N4493 и определившей возможность создания таких механизмов, состоит в том, что межосевое расстояние между звеньями 1 и 2 ( длина водила H) уменьшено до минимального эксцентриситета, которого можно достичь, если , звенья 1 и 2 находятся в разных плоскостях , а звено 1 выполнено из двух частей , что обеспечивает равномерное нагружение гибкой связи.
Механизм с гибкой связью может иметь две модификации : с вращающимся сателлитом (схема а) и с сателлитом, совершающим круговое поступательное движение (схема б) на рисунке . Две модификации этих механизмов и их основные характеристики представлены на рисунке 2. Большее практическое значение имеет схема а.
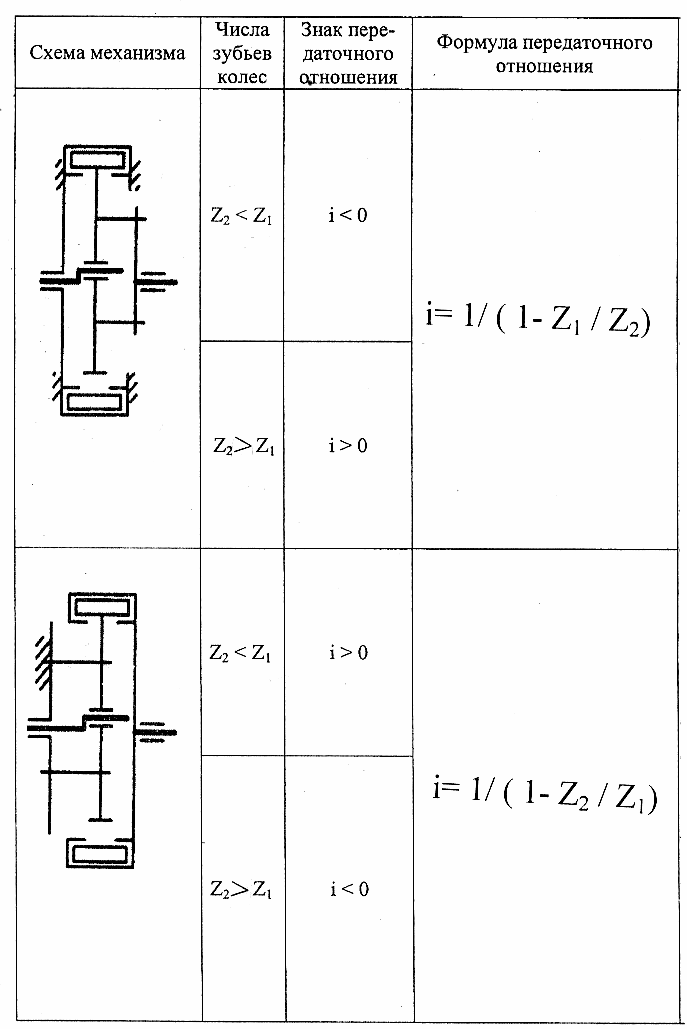
Рисунок 2 - Две модификации двухколесной схемы планетарного механизма с гибкими связями
Графики зависимости передаточного отношения планетарной передачи с гибкой связью от отношения чисел зубьев имеют характерный вид гиперболы (рисунок 3).

Рисунок 3 – График зависимости передаточного отношения ПМГС от отношения чисел зубьев шкивов Z1/Z2 (для схемы а по рисунку 2)
Здесь обозначено: Z1 - число зубьев неподвижного шкива, Z2 – число зубьев сателлита. Из анализа графика следует, что у функции, представленной на графике, имеется асимптота при значении Z1/Z2=1 и передаточное отношение в этой точке стремиться к бесконечности. Физически это означает, что при равенстве чисел зубьев неподвижного и подвижного шкива при вращении входного вала выходной вал неподвижен. В таком случае точки на шкиве - сателлите движутся по круговой траектории, а сам шкив совершает движение без поворота – круговое поступательное движение. При переходе через точку Z1/Z2=1 происходит изменение направления вращения выходного вала. Аналогичный вид имеет график передаточного отношения для механизма схемы б.
Возможны две схемы реализации планетарных редукторс гибкой связью : с двумя звездочками и с четырьмя звездочками. ( Возможен даже вариант исполнения редуктора с одной звездочкой и устройством удержания гибкой связи от поворота ).
В схеме с четырьмя звездочками
(рисунок 5![]() )
сателлит выполнен с двумя зубчатыми
венцами с числами зубьев различающимися
на один зуб, кроме того имеется неподвижная
звездочка , закрепленная в корпусе
, и подвижная звездочка, установленная
на выходном валу. Входным звеном является
водило. Неподвижная звездочка и первая
звездочка на сателлите различаются по
числу зубьев на один зуб и охвачены
приводной цепью , вторая звездочка
сателлита и звездочка на выходном валу
также различаются по числу зубьев на
один зуб и также охвачены цепью. Числа
звеньев обеих цепей различны и на единицу
больше чисел зубьев наибольших звездочек
в своих ветвях. Обе цепи имеют одинаковый
шаг. Обязательное требование для
существования механизма - межосевые
расстояния в обеих ветвях должны быть
одинаковы.
)
сателлит выполнен с двумя зубчатыми
венцами с числами зубьев различающимися
на один зуб, кроме того имеется неподвижная
звездочка , закрепленная в корпусе
, и подвижная звездочка, установленная
на выходном валу. Входным звеном является
водило. Неподвижная звездочка и первая
звездочка на сателлите различаются по
числу зубьев на один зуб и охвачены
приводной цепью , вторая звездочка
сателлита и звездочка на выходном валу
также различаются по числу зубьев на
один зуб и также охвачены цепью. Числа
звеньев обеих цепей различны и на единицу
больше чисел зубьев наибольших звездочек
в своих ветвях. Обе цепи имеют одинаковый
шаг. Обязательное требование для
существования механизма - межосевые
расстояния в обеих ветвях должны быть
одинаковы.
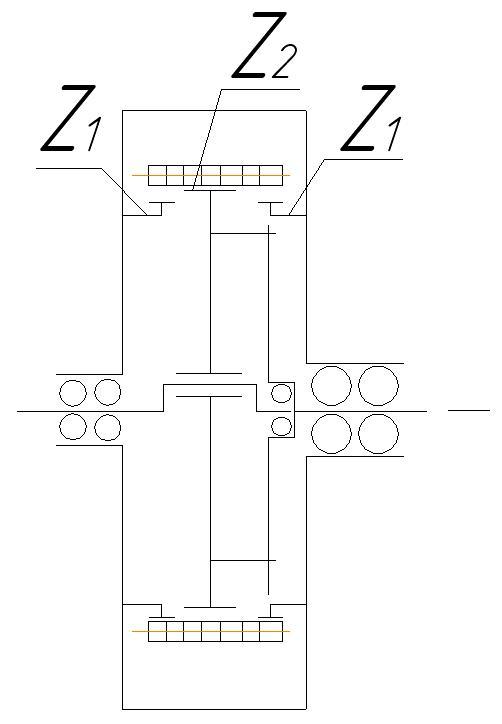
Рисунок 4 ─ Схема ПМГС с двумя звездочками
Для определения передаточного отношения цепного планетарного редуктора вне зависимости от его схемы определяется с использованием метода обращения движения, известного из теории зубчатых планетарных механизмов. Суть его в том, что стойке механизма сообщается движение с угловой скоростью равной угловой скорости водила , но в противоположном направлении. Тогда водило условно становится неподвижным и механизм превращается в рядовой, в данном случае в рядовую зубчатую передачу.
Применим этот подход к механизму с двумя звездочками (рисунок 4).
Определим передаточное отношение обращенного механизма :
i H12 = -ωH / (ω2 – ωH ) = Z2 / Z1, (1)
где ωH – угловая скорость водила, ω2 – угловая скорость сателлита.
Разделим числитель и знаменатель на ω2 .
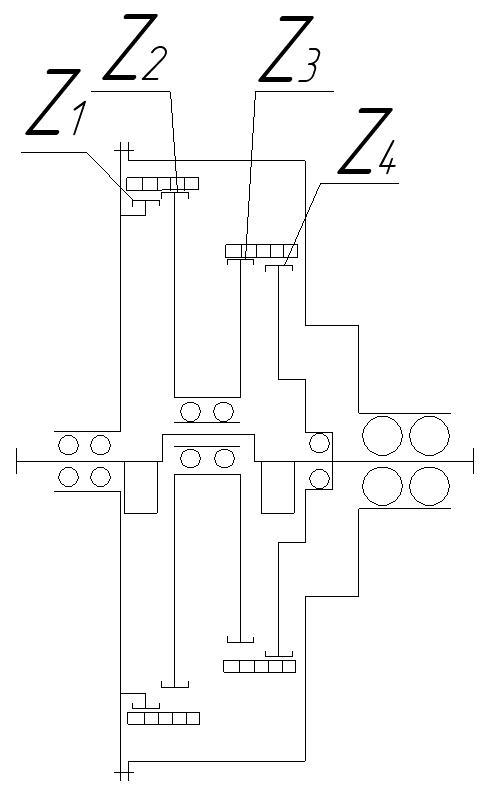
Рисунок 5 - Схема ПМГС с четырьмя звездочками (условная схема без разделения звездочек на две половины)
Обозначив
iпл = ωH / ω2 ,
получим
i H12 = - iпл / ( 1 - iпл ), (2)
откуда следует формула для определения передаточного отношения двухколесного планетарного механизма :
iпл = i H12 / (i H12 - 1 ) = Z2 / Z1 / ( Z2 / Z1 -1)
= 1 / (1 – Z1/Z2). (3)
Если разность чисел зубьев равна единице, для механизма, у которого Z1<Z2, передаточное отношение положительно и равно числу зубьев большей звездочки , для механизма , у которого Z1 > Z2, передаточное отношение отрицательно и равно числу зубьев меньшей звездочки.
В зависимости от соотношения чисел зубьев звездочек выходной вал вращается в сторону вращения входного вала или в противоположном направлении. Это может существенное влиять на КПД механизма.
Заметим, что в формулах не присутствует число зубьев цепи. Передаточное отношение определяется только соотношением чисел зубьев звездочек.
Для планетарного механизма с четырьмя звездочками (схема на рисунке 5) аналогичным образом можно вывести формулу
iпл = iH14 / (iH14 -1), (4)
где
iH14 = Z2 Z4 / Z1Z3 .
Если принять числа зубьев звездочек во второй ветви равными, т.е. Z3 = Z4 , и произвести преобразование формулы (4), разделив числитель и знаменатель на iH14 , формула (4) переходит в формулу (3). Это означает, что вторая ветвь при равных числах зубьев выполняет роль механизма , осуществляющего передачу вращения от сателлита на выходной вал без преобразования угловой скорости (механизма W, как его принято обозначать в теории планетарных механизмов), . Существенным достоинством планетарного механизма с четырьмя звездочками является то, что отпадает необходимость использования механизма крестовой или шарнирной муфты.
Если в механизме с двумя звездочками при разности чисел зубьев звездочек равной единице передаточное отношение сразу предсказуемо и равно числу зубьев меньшей звездочки, то в механизме второй схемы передаточное отношение предугадать трудно.
При работе цепных передач с зубчатыми цепями ввиду большого числа пластин в одном звене цепи не все пластины одновременно вступают в контакт с зубьями, что приводит к растягиванию по времени удара, в результате чего сила удара снижается , это обусловливает небольшой шум передачи, уровень которого существенно снижается при больших скоростях при работе со звездочками , имеющими шлифованные зубья. Поэтому такие цепи иногда называют «бесшумными».
Ниже приводятся фотографии оригинальных конструкций мелкомодульных зубчатых цепей разработанных автором.
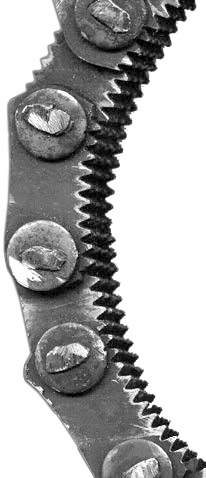
Рисунок 7 - Фотография фрагмента мелкомодульной пластинчатой зубчатой цепи с модулем 1 мм и числом пластин 8

Рисунок 8 - Фотография фрагмента мелкомодульной зубчатой цепи на основе разрезного зубчатого колеса

Рисунок 9 - Фотография мелкомодульных разрезных зубчатых цепей в сборке с сателлитами с числами зубьев цепей 142 и 82 и модулем 1 мм
Возможность разборки цепи на сегменты позволяет производить шлифование зубьев, что практически невозможно в цельных зубчатых колесах. Это тоже одно из достоинств зубчатой гибкой связи.
Такая конструкция зубчатой цепи обеспечивает ряд особенностей, характеризующих работу механизма.
Первая особенность заключается в том, что связь звеньев – сегментов односторонняя. Это значит, что усилие от одного сегмента к другому может передаваться только в одном направлении – в направлении замыкания кинематической пары сегмент-палец, а, следовательно, цепь может работать только на сжатие. В направлении размыкания кинематической пары усилие передаваться не может. Этим она принципиально отличается от обычных пластинчатых цепей.
При нагружении крутящим моментом сателлита усилие со стороны зубьев сателлита передается контактирующим с ним зубья цепи, которые в свою очередь через цилиндрические пальцы и последующие сегменты передают усилия на зубья неподвижного (опорного) зубчатого колеса. При этом цепь совершает волнообразное движение, обеспечивая возможность обкатывания сателлита по окружности. Однако, в отличие от полной неподвижности, в результате волнообразных движений цепь как одно целое перемещается относительно корпуса. Это еще одна характерная особенность , отличающая механизм с гибкими связями от известного волнового механизма
Вторая особенность заключается в том, что зубья цепи входят в контакт с зубьями сателлита на полную высоту , что обеспечивает более выгодные чем в волновой передаче условия нагружения зубьев. Заметим, что в традиционной волновой передаче только небольшая часть зубьев из общего числа контактирующих зубьев входит на полную высоту – на остальных зубьях постепенно уменьшается глубина захода вплоть до полного выхода зубьев из зацепления.
Для обеспечения полноты зацепления зубьев цепи и звездочек, при нарезании зубьям цепи желательно назначать определенное положительное смещение, а зубьям сателлита – отрицательное смещение.
Литература
1.Борисенко Л.А. Принципы построения и классификация планетарных передаточных механизмов с гибкими связями /Л.А.Борисенко //Вестн. Белорус.-Рос. ун-та – 2008.-N4- с. 69-75.
2.Борисенко Л.А. Основы проектирования цепных планетарных редукторов с втулочными и роликовыми приводными цепями //Л.А.Борисенко //Вестн. Белорус.- Рос. ун-та 2010.-N4- с.33-39.
3.Борисенко Л.А. Основы проектирования цепных планетарных редукторов с мелкомодульными зубчатыми цепями / Л.А.Борисенко //Вестн. Белорус.-Рос. ун-та – 2011. –N3 – с.24-34.
4. Борисенко Л.А.Малогабаритные передаточные механизмы для мехатронных устройств: монография /Л.А.Борисенко. - Могилев: Белорус.-Рос. ун-т,2013.-186 с.
5.Пат.4493 РБ, МКИ F 16H 1/32. Ременная планетарная передача/ Л.А.Борисенко.-N19980569;заявл.15.06.98. опубл. 30.06.02.-3 с.
6.Пат. 5247 РБ, МКИ F 16H 55/00. Планетарная передача с гибкой связью/ Л.А.Борисенко .- N2080770; заявл. 29.06.07опубл. 14.10.08.- 3 с.
7.Пат. 7085 РБ, МКИ F 16 H 9/26. Зубчато-цепная планетарная передача/ Л.А.Борисенко .- N20100702; опубл. 28.02.11. – 3 с.
8. Пат. 8293 РБ , МКИ F 16 H 9/26. Зубчато-цепная планетарная передача / Л.А.Борисенко, Д.Н.Калеев .- N2011054; заявл. 03.10.11;опубл. 30.06.12.- 3 с.
L. A. Borisenko, doctor of engineering sciences, professor
PLANETARY GEARS WITH FLEXIBLE LINKAGES
Belarusian-Russian University, Mogilev, Republic of Belarus
Summary
The article deals with the principles of construction, some elements of the theory, general classification of planetary gears with flexible linkages and some experience of construction of such elements. Flat belts, multiple V-belts and toothed belts as well as different chains are used as flexible linkages. This is a new, unstudied class of planetary gears in addition to existing planetary gears with toothed wheels and wave gearings.
Key words: flexible linkage, planetary gear, gear ratio