

Вопрос 27
Статична та динамічна стійкість паралельної роботи синхронних генераторів.
Под устойчивостью СЭЭС понимают ее способность переходить от одного устойчивого режима к другому, также устойчивому режиму после различного рода возмущений. Различают статическую и динамическую устойчивость работы СЭЭС и ее элементов.
Статической устойчивостью СЭЭС называют ее способность возвращаться к исходному режиму (или весьма близкому к нему) после малых изменений ее параметров.
Динамической устойчивостью СЭЭС называют ее способность переходить от исходного устойчивого режима к другому, также устойчивому режиму либо вернуться к установившемуся режиму, близкому к исходному, после больших изменений ее параметров.
Устойчивость работы СЭЭС включает в себя два понятия – устойчивость параллельной работы генераторов и устойчивость нагрузки.
Нарушение устойчивой работы СГ проявляется в следующем: переходе в двигательный режим; нарушении синхронной связи и переходе в асинхронный режим; нестабильном распределении нагрузки или её постоянном колебании между параллельно работающими генераторами; отключении защитными средствами под действием максимальных прямых и обратных токов.
При рассмотрении работы асинхронной нагрузки под устойчивостью понимают способность АД продолжать работать на устойчивой части механической характеристики при значительных, но ограниченных по времени провалах напряжения в сети.
Статическая устойчивость параллельной работы синхронных генераторов
Из теории электрических машин известно, что, пренебрегая явнополюсностью ротора, электромагнитная мощность синхронного генератора
![]() (1)
(1)
где Е, U—соответственно э. д. с. и напряжение обмотки статора;
xd — синхронное индуктивное сопротивление обмотки статора;
— угол между векторами э. д. с. и напряжения, а также между векторами м. д. с. обмотки статора и обмотки ротора в пространстве.
Эту зависимость называют угловой характеристикой синхронной машины (рис. 1). Ее часть, расположенная выше оси абсцисс, соответствует режиму работы генератором, а часть, расположенная ниже оси абсцисс, — режиму работы двигателем.

Рисунок 27.1. Угловая характеристика синхронного генератора
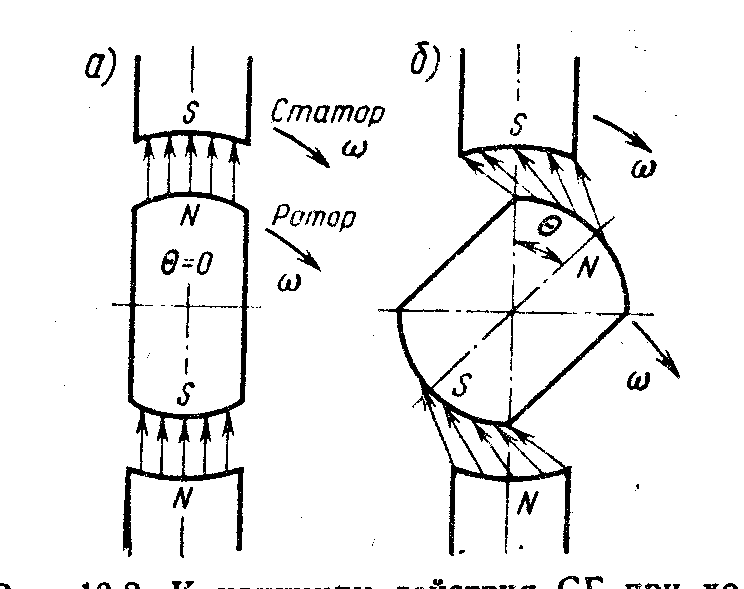
Рисунок 27.2. Принцип действия СГ в режиме холостого хода (а) и под нагрузкой (б)
При холостом ходе = 0 (рис.27, а) механическая мощность, приложенная к валу генератора со стороны приводного двигателя, и электромагнитная мощность, отдаваемая генератором, также равны нулю. При увеличении подачи топлива (или пара) приводному двигателю генератора его ротор «забегает» вперед относительно статора на некоторый угол , вызывая растяжение магнитных линий (рис.27, б). Генератор развивает электромагнитную мощность, равную (но противоположную по знаку) механической мощности на валу, и ротор продолжает равномерное вращение с прежней (синхронной) частотой. При номинальной нагрузке генераторов =15 30°. Дальнейшему повышению механической мощности на валу генератора (см. рис. 27.1) будет соответствовать увеличение угла на + и электромагнитной мощности генератора на + Р вплоть до угла = 90°. При = 90° увеличение механической мощности на валу вызывает увеличение угла на + и уменьшение электромагнитной мощности генератора на — Р. К ротору генератора будет приложена избыточная мощность, под действием которой угол будет непрерывно увеличиваться. В результате магнитная связь между ротором и статором нарушается, и генератор переходит в асинхронный или двигательный режим работы с последующим отключением его защитой.
Значение максимальной мощности генератора (статический предел мощности) соответствует углу = 90° (sin =1) и определяется выражением
![]() (2)
(2)
Отношение максимальной мощности к номинальной называется перегрузочной способностью генератора:
![]() (3)
(3)
Данный коэффициент характеризует запас статической устойчивости генератора.
Отношение Р/ или в пределе dP/d принято называть синхронизирующей мощностью Рсинх. Величину dP/d называют еще практическим критерием статической устойчивости. Ее положительный знак характеризует способность генератора обеспечить синхронную работу с данной системой. Синхронизирующая мощность при значениях угла от 0 до 90° — положительна, а в пределах от 90 до 180° — отрицательна. При = 90° синхронизирующая мощность равна нулю, и с этого момента генератор не может работать параллельно с другими генераторами
Таким образом, участок ОА кривой (см. рис. 27.1) соответствует устойчивой работе, а участок АВ — неустойчивой. Условие dP/d >0 является условием статической устойчивости работы синхронного генератора.
Значение угла при номинальной нагрузке генератора находится в пределах 25 - 35. При этом sinн в среднем равен 0,5, а кпер = 2, т. е. по статической устойчивости допускается перегрузка генератора в два раза. При возникновении подобных и даже меньших перегрузок генераторов СЭЭС производится автоматическое отключение ряда приемников электроэнергии, а в крайнем случае отключение генераторов. При переходе генератора в двигательный режим он отключается защитой.
Иногда при резком увеличении нагрузки генератора может произойти проворачивание генератора на 360. Машину не следует немедленно отключать, так как после подачи топлива или пара машина снова переходит в двигательный режим.
Из формулы 1 видно, что статический предел мощности можно повышать, увеличивая э. д. с. и напряжение или уменьшая синхронную реактивность сопротивления генератора. Последнее связано с увеличением воздушного зазора, а следовательно, с ростом массы, габаритных размеров и стоимости генератора, а также с увеличением тока к. з. Наиболее простым и эффективным средством повышения статической устойчивости считается увеличение э.д.с. генератора. При весьма сильном возбуждении можно добиться устойчивой работы генераторов даже при угле несколько превышающем 90° (зона искусственной устойчивости).
Нарушение статической устойчивости генераторов наиболее вероятно при большом снижении напряжения на шинах электростанции, в результате чего резко уменьшается статический предел мощности.
В случае ненормальной работы регуляторов частоты вращения возможно ненормальное перераспределение мощности между параллельно работающими генераторами, при котором один из них может быть перегружен в 2—2,5 раза и достигнет статического предела мощности. В результате произойдет затормаживание приводных двигателей генераторов или отключение генератора защитой от перегрузки.
Сохранение СЭЭС устойчивости при малых отклонениях параметров обязательная, но еще недостаточная предпосылка для сохранения ее динамической устойчивости. Система, устойчивая статически, может оказаться неустойчивой в динамическом режиме.
Динамическую устойчивость работы генераторов рассмотрим на примере мгновенного уменьшения напряжения в системе, когда генератор с угловой характеристики 1 переходит на работу в режиме, которому соответствует угловая характеристика 2 (рис. 27.3).
Точка А характеристики 1 соответствует работе генератора при номинальном напряжении, при котором угол равен н. При резком уменьшении напряжения в сети угол в вследствие инерции вращающихся масс ГА не может измениться мгновенно, а электромагнитный момент генератора резко уменьшится, т. е. точка А с характеристики 1 переместится в точку В характеристики 2 при =н. Мощность, отдаваемая генератором, уменьшится от Рн до P1, а мощность приводного двигателя Рп.д. сохраняется. Под действием разности мощностей Рп.д. — Р1 > 0 ротор генератора получит ускорение, его угловая скорость будет расти (см. годограф угловой скорости на рис. 27.3) и угол начнет увеличиваться.
В точке С наступит равенство мощностей генератора и приводного двигателя Рп.д=Рн, но из-за инерции ГА ротор генератора будет отклоняться до точки D. На участке CD мощность генератора больше мощности приводного двигателя Рп.д <Р, в результате чего ротор будет затормаживаться, его угловая скорость будет уменьшаться.
При угле 2 угловая скорость вращения ротору будет равна синхронной, и он начнет обратное движение, при этом угол уменьшится. Совершив несколько качаний относительно угла 1, соответствующего точке С на кривой 2, ротор генератора прекратит колебательный процесс. Значение запасенной ротором кинетической энергии при переходе с кривой 1 на кривую 2 пропорционально площади S1 фигуры АВС. Наибольший угол 2 , до которого отклоняется ротор, соответствует площади S2 фигуры CDE (площади замедления), равной площади S1 фигуры АВС (площади ускорения).

Рис. 27.3. Графики для определения динамической устойчивости работы СГ
Очевидно, что предельным по динамической устойчивости углом качаний пр для рассматриваемого случая является угол, соответствующий точке F, поскольку при больших углах мощность приводного двигателя будет снова превышать мощность генератора и угол достигнет 180°. При этом произойдет переход генератора в асинхронный или двигательный режим работы с последующим отключением защитой. Качания ротора в пределах угла от н до пр не вызывают нарушения динамической устойчивости, хотя пр > 90°.
Если же при переходе с характеристики 1 на характеристику 2 (рис. 27.3.) площадь S1 фигуры АВС будет больше площади S2 фигуры CD, то для сохранения динамической устойчивости при угле 2 необходимо восстановить напряжение до первоначального значения. При этом работа генератора будет характеризоваться не точкой D характеристики 2, а точкой Е характеристики 1 и затем точкой F, после чего площадь S2 фигуры CDEFG будет равна площади S1 фигуры АВС и ротор начнет обратное движение к точке А (см. рис. 27.3, б) по пути F—Е—А.
Таким образом, динамическая устойчивость параллельной работы синхронных генераторов обеспечивается при условиях:
![]()
![]() .
.
Анализ динамической устойчивости методом площадей применим при исследовании параллельной работы генератора с мощной сетью. Его можно использовать и при изучении параллельной работы двух генераторов, имеющих различные приводные двигатели (турбогенераторов и дизель-генераторов) или генераторов различной мощности (при одинаковых приводных двигателях). Последнее ограничение объясняется большим различием механических постоянных времени, которые характеризуют инерционные свойства различных типов ГА. Опыты показывают, что при затянувшихся к. з. и в случае, когда напряжение падает почти до нуля, параллельная работа генераторов нарушается, т. е. они оказываются не связанными друг с другом (работающими раздельно). Однако при достаточной чувствительности и идентичности регуляторов напряжения и частоты после отключения к. з. частоты вращения генераторов мало отличаются одна от другой и в отдельные моменты могут совпадать. В эти моменты и происходит сцепление магнитных полей ротора и статора, т. е. ресинхронизация. При одинаковых приводных двигателях время отключения КЗ не должно превышать 0,5 с.
Кратковременное нарушение динамической устойчивости параллельной работы генераторов с последующей ресинхронизацией и качаниями роторов в большинстве случаев не опасно, а длительное – опасно всегда, посколько сопровождается большими токами и провалами напряжения, переходом генераторов в двигательный режим. В связи с эти автоматические устройства защиты должны отключать генераторы с определенной выдержкой времени.