

Способы пуска тяговых электродвигателей
В настоящее время применяют следующие системы пуска:
-Плавный реостатный пуск, при котором в течение всего пуска поддерживается неизменный пусковой ток (например, трамвайный вагон Т-3);
-Ступенчатый пуск, при котором поддерживается неизменной средняя сила тяги с определенным припуском (например, трамвайный вагон КТМ-5М-3, троллейбус ЗИУ-9);
-Безреостатний пуск, осуществляемый с помощью электронных преобразователей (трамвайный вагон Т-3М, троллейбусы ЗИУ-10, 14-ТР).
Плавный реостатный пуск
При плавном реостатном пуска последовательно с ТЭД включается реостат с большим количеством секций, которые выводятся по мере пуска, тогда пусковой ток ТЭД определяется как
I П U СФ v |
|
|
|
|
Схема пуска ТЭД |
|||||||
|
|
|
|
|||||||||
|
|
r RП |
|
|
|
|
|
I |
||||
Зависимость изменения пускового сопротивления от скорости: |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||
RП |
U |
СФ v |
r |
|
|
RП |
|
|
r |
|||
|
|
|
|
|
|
|
|
ТЕД |
||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|||||
|
I П |
I П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
В момент трогания подвижного состава, когда скорость движения равна нулю, величина пускового сопротивления будет определяться так:
После включения ТЭД: v ↑, ЭДС ↑. Если сопротивление пускового реостата = const, то пусковой ток Iп ↓. Для поддержания Iп необходимо Rп ↓ по мере роста скорости подвижного состава.
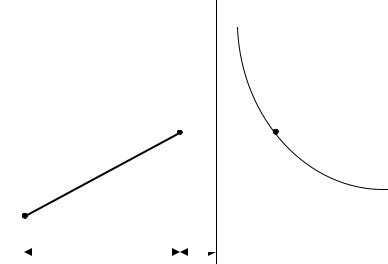
Закон изменения Rп можно получить, если принять I = Iп = const и Ф = Фп = const,
v |
U |
|
СФ В |
|
RП r А В v |
А |
|||
|
||||
|
I П |
І П |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Зависимость Rп = f (v) является линейной. Точка а |
||||
|
|
U Д |
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
соответствует моменту сдвига подвижного состава, |
|||||||||||
RП r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
когда v = 0 и |
U Д |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
І П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RП r |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
IП |
І П |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Точка b соответствует условиям, когда |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
RП |
|
|
|
|
r |
I |
пусковой реостат полностью выведен, |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RП 0 |
RП r r |
v=vп . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Точка с соответствует моменту выхода на автоматическую характеристику.
Плавная регулировка сопротивления пускового реостата обеспечивают системы пуска с клавишными или коллекторными контроллерами, (например трамвайные вагоны «Татра»).
Плавные системы пуска достаточно сложные, т.к. регулирование пускового реостата связано с усложнением системы управления. Для выбора люфтов в передаче в таких системах пуска используется способ перевода части ТЭД на ослабленное поле, уменьшая начальный момент. Для плавного нарастания пускового тока дополнительно используются демпфирующие сопротивления. Конструкция ускорителя для плавного пуска также сложная, так как содержит большое количество пусковых реостатов и элементов их крепления.
Плавный реостатный пуск
Ступенчатой реостатный пуск
Реостат разделяют на отдельные секции, количество которых значительно меньше чем при плавном реостатном пуске. Отпайки от каждой секции присоединят к контактам силового контроллера или к контактам реостатного контроллера. По мере разгона подвижного состава отдельные секции пускового реостата закорачиваются. При таком пуска уже невозможно поддерживать постоянным пусковой ток, силу тяги и ускорения.
В случае ступенчатого пуска пытаются ограничить колебания пускового тока.
Поэтому чтобы обеспечить плавность пуска необходимо большее количество ступеней пускового реостата, а это ведет к усложнению схемы управления.
Значения расчетного пускового тока должна быть меньше наибольшего допустимого тока с коммутацией IКОМ и пусковой режим ограничен по сцеплением, т.е.
IП мах Іком (1,8 2)Ія |
где G0сц |
– нагрузка на ось, кН |
FП мах 1000 G0 сц
По электромеханическими характеристиками по значению Fпмах находят наибольшее допустимое значение пускового тока по сцеплению Iсц мах.
Максимальным значением пускового тока IПмах принимают наименьшее из следующих параметров: Iсц мах или Iком .
При эксплуатации подвижного состава возможны изменения значения пускового тока в больших пределах за счет изменения напряжения в контактной сети или за счет быстрого вывода пусковых сопротивлений при неавтоматическом пуске.
При ступенчатом пуске пусковые диаграммы имеют две стадии: начальную, в процессе которой ускорение нарастает, и следующую, в которой пуск происходит при среднем постоянном ускорении.
Значение ускорения выбирают для пуска нормально нагруженного подвижного состава на горизонтальной площадке с учетом ограничений по допустимым нагрузкам для двигателей или по условиям сцепления.
Ступенчатой реостатный пуск
Построение пусковой диаграммы начинают обычно со второй стадии.
По значению начального ускорения анач,
не превышающем 0,3 ... 0,4 м/с2 при пустом подвижном составе, и характеристике силы тяги определяют начальный ток Iнач на первом
реостате.
При этом первые ступени пускового реостата должны обеспечить возможность пуска при наихудших условиях сцепления, т.е. ограничить начальную силу тяги значением, что соответствует минимальному коэффициенту сцепления.
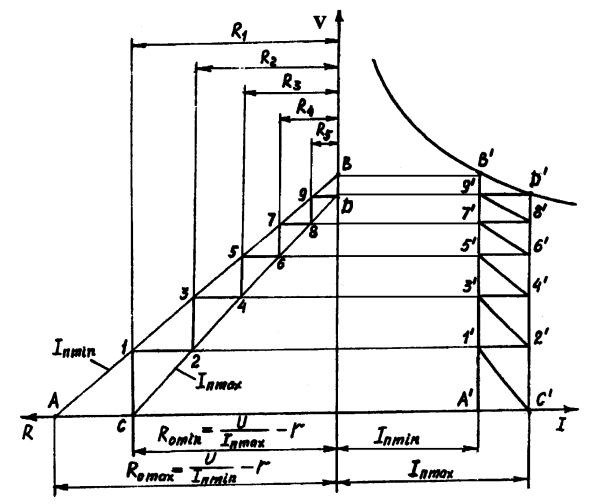
Диаграмма ступенчатого реостатного пуска одного двигателя
Ступенчатой реостатный пуск
С увеличением скорости выводятся отдельные ступени пускового реостата, пока он не окажется полностью выведенным (точка а) и двигатели не перейдут на работу на безреостатных характеристиках.
С увеличением скорости поезда ток постепенно уменьшается, и в момент, когда он снизится до минимального значения, выводится следующая секция реостата, в результате чего ток снова возрастает. Этот процесс продолжается до перехода на характеристику при последовательном соединении двигателей и полном возбуждении (кривая 1).
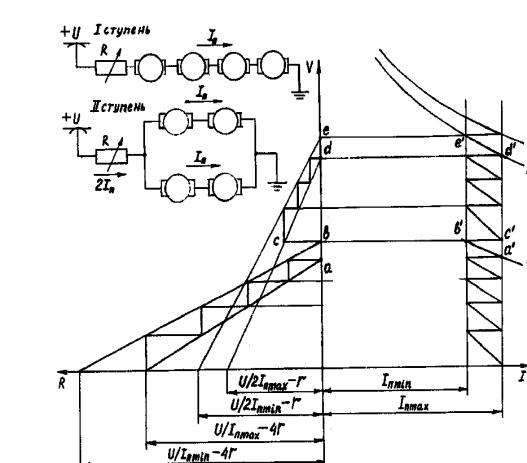
Для дальнейшего разгона поезда тяговые двигатели переключаются с последовательного соединения на последовательно-параллельное. При этом общий ток всех двигателей удваивается. Чтобы избежать резкого толчка тока при удвоении напряжения в момент перехода на последовательно-параллельное соединение двигателей вновь вводится, а затем ступенями постепенно выводится часть (отрезок cb) пускового реостата для того, чтобы поддерживать заданные пределы колебаний тока.
Диаграмма ступенчатого реостатного пуска с последовательным и последовательно-параллельным включением четырех тяговых двигателей
После достижения скорости, при которой допустим переход на естественную характеристику (кривая 2) при полной напряжении и полном возбуждении, полностью выводится пусковой реостат (точка d). повышение скорости еще есть возможность перейти на характеристику 3, которая соответствует ослабленному возбуждению.
Если на ступенях ослабленного возбуждения поддерживать такие же колебания тока, как и при полном, то при ослабленном возбуждении уменьшится средняя сила тяги, а следовательно, и среднее ускорение. Сохранить одинаковую силу тяги на всех ступенях пуска можно, увеличив ток на ступенях ослабленного возбуждения. Поэтому в тех случаях, когда максимальная пусковая сила тяги ограничена не самой допустимой нагрузкой двигателя, а сцеплением, целесообразно увеличивать пусковые токи на ступенях ослабленного возбуждения.
В случае больших ускорений, которые применяются для моторвагонной тяги, за время электрического переходного процесса, происходящего после вывода степени пускового реостата, скорость поезда успевает немного увеличиться. Это смягчает толчки тока в моменты перехода с одной ступени на другую, особенно на ступенях регулирования возбуждения, при которых вследствие большой индуктивности обмоток возбуждения значительно замедляются переходные процессы.
Безреостатный пуск с помощью импульсных преобразователей
Реостатный пуск тяговых двигателей с контакторно-реостатной системой управления имеет существенные недостатки: значительные потери энергии, переключения групп тяговых двигателей, необходимость использования большого числа силовых контактов, разрывающие большие токи (а
следовательно, и специальных аппаратов, таких, как реостатный контроллер, контакторы для перегруппировки тяговых двигателей, линейные
Наличие большого числа контактных элементов снижает надежность.
Большинство из этих недостатков устраняется при импульсном управлении, что обеспечивает возможность плавного безреостатного регулирования в широких пределах напряжения, которое подводится к тяговых двигателям. При этом упрощается управление скоростью подвижного состава, упрощается автоматизация процессов движения поезда, улучшаются условия использования рекуперативного торможения.
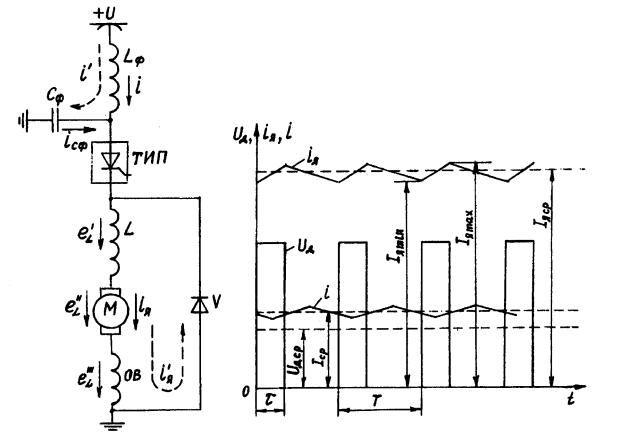
Принцип регулирования: ток поступает в цепь двигателя отдельными импульсами. Непрерывный ток ТЭД и контактной сети формируется с помощью реакторов и конденсаторов. Изменяя соотношение между длительностью импульса и временем паузы, можно изменять среднее напряжение на двигателях и тем самым регулировать их скорость, осуществлять плавный безреостатний пуск и электрическое торможение в широком диапазоне скоростей. Периодическое отключение и подключение контура нагрузки к источнику энергии обеспечивается тиристорным или транзисторным ключом.
Безреостатный пуск с помощью импульсных преобразователей
Для сглаживания пульсаций тока в контактной сети и в ТЭД, неизбежно возникающих при импульсном регулировании, предусматриваются специальные фильтры. Тиристорно-импульсный регулятор состоит из входного фильтра Lф-Сф тиристорно-
импульсного прерывателя ТИП, реактора L и обратного диода V, который шунтирует последовательно включенные реактор L и обмотки машины М.
ТИП представляет собой ключ, имеющий два устойчивых состояния: замкнутое и разомкнутое. Он переключается с частотой f. В интервале каждого периода ключ замкнут в течении времени и разомкнутый в часть периода T- .
Пренебрегая пульсациями напряжения на конденсаторе Сф, можно считать,
что к цепи тяговой машины прикладываются прямоугольные импульсы напряжения амплитудой U и длительностью .
Среднее значение этого напряжения за период : UД ср U U
T
С помощью тиристорно-импульсного регулятора среднее значение напряжения, прикладываемого к цепи ТЭД, можно регулировать в широких пределах от UД ср min до UД ср max U .
Энергия от внешнего источника питания подводится к цепи ТЭД импульсами. Однако преобразование электрической энергии в механическую в ТЭД происходит непрерывно независимо от состояния прерывателя, что обеспечивается использованием в рассматриваемой схеме обратного диода V и наличием накопительных элементов: реактора L и обмоток тяговой машины.
Безреостатный пуск с помощью импульсных преобразователей
За время энергия, поступающая от внешнего источника напряжения U, потребляется тяговой машиной полностью, частично запасаясь в накопительных элементах для последующего использования тяговой машиной в интервале периода T- , когда поступление энергии от внешнего источника питания отсутствует. Вследствие этого тяговая машина получает питание непрерывно: в интервале - от внешнего источника напряжения U, а часть периода 1- --- благодаря энергии, запасенной в накопительных элементах. Поэтому, несмотря на импульсный характер питания тяговой машины от внешнего источника питания, ток в ее цепи будет непрерывным. Одну часть периода ток нарастает, а другую уменьшается, замыкаясь под действием ЭДС.
Т. о., при размыкании импульсного регулятора ток в цепи тяговой машины не разрывается, а происходит изменение контура для его замыкания. Это исключает появление перенапряжений на регуляторе, несмотря на то, что обмотки тяговой машины и реактор имеют большую индуктивность.
При случайном обрыве контура обратной диода V работа рассматриваемой системы импульсного регулирования напряжения становится невозможной, так как будет отсутствовать контур для замыкания тока i‘я в интервале 1- периода, а энергия, запасенная в накопительных элементах, не сможет
быть преобразована в полезную работу, что вызовет недопустимое перенапряжение на прерывателе и приведет к выходу его из строя.
При работе импульсного прерывателя нельзя допускать также прерывания тока в контактной сети, которая имеет существенную индуктивность. Непрерывность тока в контактной сети при импульсном характере нагрузки обеспечивается Г-образным фильтром Lф-Сф. Независимо от состояния прерывателя
ток в контактной сети имеет контур для замыкания: по цепи тягового двигателя (i) или по цепи фильтрового конденсатора (i') . В интервале периода 1- , несмотря на то, что тяговая машина отключена от контактной сети, происходит потребление электрической энергии от источника питания, которая не тратится, а запасается в конденсаторе. В интервале периода в цепь тяговой машины поступает энергия как от источника питания, так и от конденсатора, которая без учета потерь в элементах схемы равна энергии, поступившей от источника за весь период. Т. о., благодаря накоплению энергии в конденсаторе Сф в
интервале периода 1- обеспечивается непрерывность тока в контактной сети.
При правильном выборе параметров фильтра Lф и Сф максимальные пульсации тока ограничивают на уровне 1 ... 2% от тока Iср, т.е. в любой момент времени мгновенное значение тока в
контактной сети незначительно отличается от среднего. Вся энергия, потребляемая от источника питания
за исключением потерь в элементах схемы, используется тяговой машиной.
Импульсный регулятор можно считать трансформатором напряжения в цепях постоянного тока с регулируемым коэффициентом трансформации.
Систему импульсного управления, при которой частота импульсов, а следовательно, и продолжительность периода неизменны, а меняется длительность импульса , называют широтно- импульсной, так как регулируется ширина импульса. Если же длительность импульса сохраняется постоянной, для регулирования напряжения надо менять время Т, то есть частоту следования импульсов. Такая система получила название частотно-импульсной. Возможны, хотя и нашли меньшее распространение, комбинированные импульсные системы, в которых изменяется как Т, так и .
Применение импульсного регулятора напряжения позволяет изменять напряжение на тяговой машине в широком диапазоне, что позволяет отказаться от необходимости переключения тяговых машин с последовательного на последовательно-параллельное соединение и применять наиболее рациональную схему включения тяговых машин без перегруппировок в процессе пуска. Схема соединения тяговых машин влияет на массо-габаритные показатели импульсного регулятора и тягово-энергетические показатели вагона.
Последовательное соединение
Тяговые машины объединены в одну группу, что, с одной стороны, обусловливает минимальное число и массу коммутационных аппаратов, а с другой - максимальные массо-габаритные показатели фильтрового конденсатора преобразователя, так как частота изменения напряжения на конденсаторе фильтра минимальная и равна частоте пульсаций тока в цепи тяговых машин. При рассматриваемой схеме соединения ТЭД имеют повышенную склонность к буксовке, так как при потере сцепления с рельсом одной колесной пары напряжение на тяговой машине, связанной с этой колесный парой, растет, что и вызывает разносное буксование. Следует отметить, что с помощью импульсного регулятора V1 на каждой машине в тяговом режиме напряжение плавная изменяется в пределах:
U
UД min UД 4
На напряжение U/4 и должны в этом случае проектировать тяговую машину.