

Управление возбуждением ТЭД
Выполняя определенным образом переключения в ОВ и подбирая определенное число витков в секциях, можно достичь регулирования ослабления поля в достаточно широком диапазоне.
При числе витков первой секции в два раза больше числа витков второй секции W1=2W2 схема позволяет ослабить поле до 33% третьей ступени.
На первой ступени ослабления поля отключается вторая секция: контактор 2 включен, а контактор 1 – отключен.
На второй ступени ослабления поля обмотки включены параллельно с контакторами 2 и 3.
На третий ступени отключается контактором 2 первая секция обмотки.
ТЕД
|
3 |
ОВ1 |
ОВ2 |
|
1
2
При использовании шунтирующих резисторов остается неизменным число витков, а изменяется ток ОВ. С помощью дополнительных контакторов можно получить практически любое число ступеней ослабления поля.
Указанные способы регулирования возбуждения имеют следующие недостатки:
-При регулировании поля с использованием переключения обмоток ТЭД необходимо иметь дополнительные выводы от ОВ, что приводит к некоторому увеличению радиальных размеров, веса и усложнению конструкции ТЭД. Но при использовании секционирования обмоток получаются более стабильные скоростные и тяговые характеристики ТЭД, так как на степень ослабления поля практически не влияет температура ОВ;
-При регулировании поля с использованием активных сопротивлений кроме резисторов и контакторов нужны дополнительные аппараты - индуктивные шунты. Но при использовании шунтирующих резисторов на отклонение характеристик от расчетных влияет температура обмоток, сопротивление контактов
ипроводов в силовой цепи, а также допуски на шунтирующие сопротивления.
ТЕД
1
Rш
Rв
Управление возбуждением ТЭД
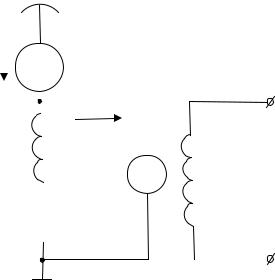
Регулирование возбуждения с использованием возбудителя
Принцип действия такого способа заключается в том, что |
|
|
|
|
|
|
|||||||||||||
І |
|
|
|
|
|
|
|||||||||||||
параллельно обмотке возбуждения С1-С2 через дополнительный |
|
ТЕД |
R |
||||||||||||||||
резистор R подключается специальный возбудитель В. Изменяя |
|
|
|
|
|
|
|
|
|||||||||||
возбуждение возбудителя, можно изменять ток возбуждения |
|
С1 |
|
|
|
|
|
|
+ |
||||||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
||||||||||||||
двигателя. Такой возбудитель может быть как электромагнитный, так и |
|
|
|
|
|
|
|
|
ІВ |
|
|||||||||
полупроводниковый. |
Эта |
схема |
нашла |
применение |
при |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
необходимости |
изменения |
возбуждения |
двигателей |
|
|
|
|
|
|
|
|
|
В |
||||||
последовательного возбуждения в режиме рекуперации. Резистор R |
|
С2 |
|
|
|
|
|
|
|
||||||||||
необходим, чтобы от одного возбудителя можно осуществлять |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
питание нескольких обмоток возбуждения параллельно включенных |
|
|
|
|
|
|
|
|
|
|
|
|
- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
ТЭД. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При импульсном регулировании возбуждения параллельно ОВ подключают импульсный электронный регулятор, действующий как шунтирующее сопротивление. Благодаря своему быстродействию импульсный регулятор позволяет сохранить четкое распределение тока якоря между ОВ и регуляторов переходных режимов, что важно для хорошей коммутации ТЭД.
Способ регулирования магнитного потока для ТЭД смешанного возбуждения зависит от его выполнения. При преобладании намагничивающей силы параллельной ОВ ослабление поля осуществляется уменьшением тока в ней путем введения в ее цепь сопротивления.
При преобладании намагничивающей силы последовательной ОВ обычно первая степень ослабления поля выполняется отключением шунтирующей обмотки, а следующие степени - путем шунтирования сериесной обмотки активным сопротивлением (троллейбус ЗИУ-9).

Назначение и выбор параметров индуктивного шунта
При шунтировании обмоток последовательного возбуждения ТЭД только активным сопротивлением появляются нежелательные переходные процессы при резких колебаниях напряжения в контактной сети. Особенно опасны переходные процессы возникают при кратковременных отрывах токоприемников или ошибочном проезде под током изоляционных вставок контактной сети. При этом происходит потеря питания с последующим восстановлением напряжения. В этом случае в первый момент после восстановления напряжения большая часть тока якоря проходит по шунтирующим сопротивлениям, потому что ОВ имеет значительное индуктивное сопротивление. При этом величина магнитного потока незначительна и происходит резкое увеличение тока якоря. Следует отметить, что при переходном процессе коэффициент ослабления поля значительно меньше, чем в стационарном режиме.
Резкое увеличение тока якоря по сравнению с током в ОВ главных и добавочных полюсов приводит к ухудшению условий коммутации, что может вызвать вспышку под щетками и образование кругового огня.
Для устранения этих явлений в цепи шунтирующего сопротивления вводится индуктивность в виде катушки со стальным сердечником. При этом, для того, чтобы ток при переходном режиме равномерно распределялся между индуктивным шунтом и ОВ ТЭД, необходимо, чтобы постоянная времени этих цепей была одинаковой, то есть LШ
rШ
При переходных процессах изменение магнитного потока зависит от действия вихревых токов, возникающих в сердечниках главных и дополнительных полюсов. Поэтому индуктивность шунта рекомендуется выбирать из практического соотношения: Lш 0,5 0,75 Lв
Для двигателей с глубоким ослаблением поля рекомендуется большее значение. Собственный активное сопротивление индуктивного шунта должен быть rпш rш min
( rш min - сопротивление цепи индуктивного шунта ходовой позиции при максимальном ослаблении поля).
Назначение и выбор параметров индуктивного шунта
По мере ослабления поля намагничивающая сила индуктивного шунта возрастает, а намагничивающего сила ТЭД уменьшается (происходит снижение насыщения двигателя). Поэтому, чтобы при перегрузке не происходило значительное снижение постоянной времени индуктивной шунта, целесообразно его выполнять с большим воздушным зазором.
Индуктивный шунт представляет собой одну или несколько катушек, размещенных на стальном сердечнике. Если индуктивный шунт выполняют для нескольких групп двигателей, то катушки включают таким образом, чтобы их намагничивающей силы суммировались. За счет этого индуктивность шунта возрастает. Для подвижного состава городского электрического транспорта индуктивные шунты выполняют со стержневым сердечником, набранным из расслоенной электротехнической стали.
Влияние характеристик тяговых двигателей на использование сцепного веса и мощности
Жесткие характеристики тяговых двигателей независимого возбуждения способствуют более полному использованию мощности и тяговых свойств подвижного транспорта, чем мягкие характеристики двигателей последовательного возбуждения. Существуют факторы, ограничивающие диапазон мощностей и сил тяги тяговых двигателей.
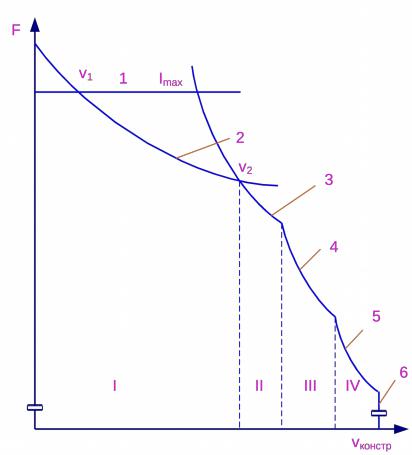
Максимальная мощность, развиваемая тяговым двигателем постоянного тока, определяется наибольшей допустимой нагрузкой, ограниченной механической прочностью и условиями работы коллекторно-щеточного аппарата. Различают четыре зоны ограничения мощности и сил тяги двигателя.
При малых скоростях (зона I) наибольшая сила тяги определяется либо максимальным допустимым током Imax, либо сцеплением колес с дорогой в зависимости от того, какое из этих условий даст меньшее
значение силы тяги. Ограничению по сцеплению соответствует линия 2, по току Imax – линия 1.
В пределах скорости от v=0 до v=v1 сила тяги определяется максимальным током, а затем до скорости v2 ,
соответствующей окончанию зоны I, – условиями сцепления. В
зоне II наибольшая сила тяги ограничивается максимальной мощностью преобразователя в случае его применения и изменяется обратно пропорционально скорости (кривая 3). В зоне III наибольшая сила тяги определяется допустимым значением реактивной э.д.с, пропорциональной Iv , вследствие
чего наибольший ток обратно пропорционален скорости, а предельная сила тяги – квадрату скорости (кривая 4). В зоне IV, в которой скорость ограничена наибольшим допустимым ослаблением возбуждения, т.е. максимальным межламельным напряжением, сила тяги должна уменьшаться обратно пропорционально скорости в степени несколько большей двух (кривая 5). Линия 6 соответствует наибольшей допустимой, так называемой конструкционной скорости vконстр., которая
ограничивается прочностью элементов тягового двигателя.

ДОНЕЦКИЙ ТРАМВАЙ
ВДонецке в 1927 году было принято решение о строительстве первой трамвайной линии. Официальное открытие состоялось в июне 1928 года.
Внастоящее время на маршрутах города можно встретить трамваи типа:
-Татра Т-3 (160 вагонов) с 1967г.;
-Татра-Юг (Т6В5) (6 вагонов), с 2003г.;
-К-1 (28 вагонов) с 2004г.;
-ЛМ-2008 (1 вагон) с 2010 года;
-два ретро-трамвая.
Трамвай типа Татра Т-3 |
Трамвай типа К-1 |
|
Трамвай типа Татра Т-3
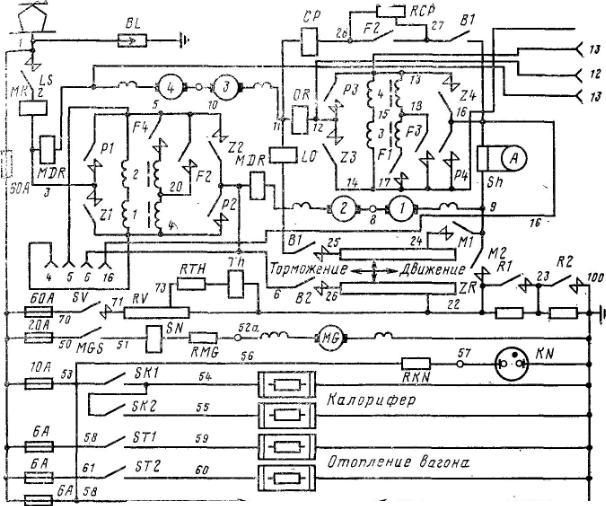
Трамвайный вагон Т-3 приводится в движение четырьмя тяговыми двигателями ТЕ-022 с последовательным возбуждением мощностью по 44 кВт при номинальном напряжении 300 В. Двигатели закрытого типа имеют независимую вентиляцию. Тяговые двигатели на вагоне соединены постоянно последовательно-параллельно.
Вагон оборудован плавной автоматической системой управления. Переключения в цепях тяговых двигателей выполняются индивидуальными контакторами (19 контакторов) и ускорителями имеющими 75 пусковых и 99 тормозных позиций.
Вагон Т-3 управляется контроллером управления, состоящим из двух аппаратов, смонтированных в общем блоке: контроллера хода JK и тормозного контроллера BK; каждый аппарат имеет свой педальный привод, а также реверсором, имеющим ручное управление. В случае если водителю нужно оставить пост управления при стоянке вагона в депо или на остановке, следует тормозную педаль поставить на защелку – вагон будет заторможен колодочными тормозами.

Трамвай типа Татра Т-3 Контроллер управления Н-14 устанавливается в кабине под пультом управления и имеет
педальный привод через рычаги 12 и 3. Пусковой барабан образуют три кулачковых 11 и одна упорная шайбы, насаженные на стальную трубу. Он приводом связан с пусковой педалью 1 и имеет пять нефиксированных положений. Каждая кулачковая шайба включает и выключает два кулачковых элемента. Кулачковые контакторы 6 монтируют на изоляционных панелях, расположенных по обе стороны от пускового и тормозного барабанов (шесть кулачковых контакторов JK1-JK6 пускового контроллера и десять ВК1-ВК10 тормозного контроллера). Тормозной контроллер выполнен из пяти кулачковых шайб 9 и упорной 8, укрепленных на валу, который проходит через отверстие цилиндрического вала пускового барабана и с помощью привода связан с тормозной педалью 2. Пусковой и тормозной барабаны вращаются в подшипниках, установленных в боковинах 7 каркаса, угол поворота их ограничивается упорными шайбами 10 и 8, а полный разворот педалей (40+1°) - резиновыми упорами. Возврат барабанов в исходное (нулевое) положение осуществляется пружинами 5.
Тормозной барабан имеет пять нефиксированных положений электрического реостатного торможения, среднее (шестое) фиксированное положение - включается колодочный тормоз и седьмое нефиксированное положение - включается рельсовый тормоз. Фиксирующее устройство 4 тормозной педали состоит из храповика и рычага с пальцем - «защелки».
При осуществлении торможения вагона следует тормозную педаль нажимать с упором на верхнюю ее часть, а для освобождения педали с фиксированного положения (для «снятия с защелки») педаль следует нажимать с упором на нижнюю ее часть и затем плавно устанавливать в верхнее нулевое положение.
Общий вид и монтажная схема контроллера управления Н-14
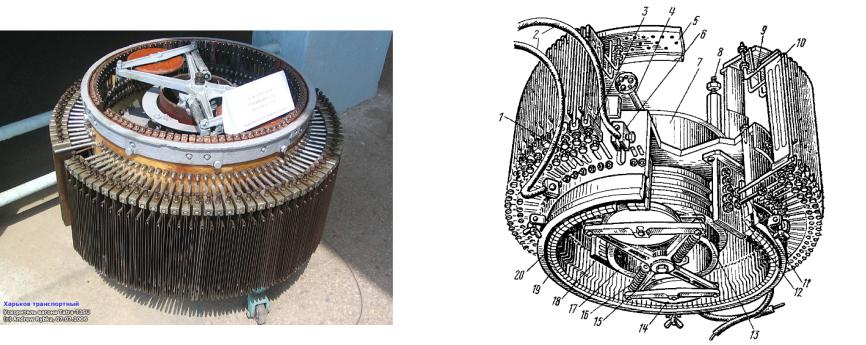
Трамвай типа Татра Т-3 Ускоритель вагона Т-3 представляет собой многопозиционный переключатель клавишного типа,
осуществляющий автоматическое выведение пускотормозных реостатов и обеспечивающий плавный пуск и торможение вагона.
Ускоритель вагона Т-3
Основанием ускорителя служит большой цилиндрический барабан 1, выполненный из изоляционного материала. В нижней части к барабану укреплено чугунное токосъемное кольцо 23 с шестью медными сегментами 24, а в верхней части чугунная плита 15, на которой установлен редуктор 7. С наружной стороны барабана на пружинных держателях 9 и 11 укреплены 95 ленточных элементов реостата 10, изготовленных из сплава, обладающего высоким удельным сопротивлением. Полное сопротивление реостата составляет 3,614 Ом. С внутренней стороны к барабану крепятся 99 контактных пальцев 13 с помощью болтов 12 и держателей 11 элементов. Зазор между пальцем и сегментом токосъемного кольца должен быть в пределах 3-5 мм, а расстояние между смежными пальцами 3,5-4 мм. Пальцы ускорителя, расположенные по одной полуокружности барабана, имеют нечетную нумерацию 1; 3; 5 и т. д. до 99, по другой полуокружности - четную нумерацию 2; 4; 6 и т. д. до 98. К выводам 6 пальцев 1; 2; 75 и 76-го подключены наконечники внешних кабелей 2. Замыкание пальцев с токосъемными сегментами происходит при накатывании на пальцы изоляционных роликов 18, укрепленных на рычагах 17 крестовины 19.
Вращение крестовины происходит от электродвигателя РМ ускорителя, связанного с редуктором гибким карданным валом 4, на котором закреплена шестерня редуктора и крестовины 19 ускорителя. Червячный редуктор имеет передаточное число 50,5. На крестовине 19 укреплен малый изоляционный барабан 21. На поверхности барабана размещены пять рядов сегментов 16, предназначенных для включения и выключения низковольтных кулачковых контакторов ускорителя ZR1-ZR10. Устанавливаются они на изоляционных панелях 14 и 22 по обе стороны малого изоляционного барабана. Включение кулачковых контакторов ZR1-ZR10 происходит при вращении малого барабана и зависит от позиции ускорителя.
Крестовина ускорителя может поворачиваться почти на половину оборота (до упора), при этом ее ролики прижимают соответствующие контактные пальцы к токосъемному кольцу. Позиции ускорителя обозначают по номерам прижатых пальцев. Когда первый ролик крестовины замыкает один палец с токосъемным кольцом, второй ролик находится в положении, при котором он прижимает два пальца и наоборот. Поэтому при вращении крестовины чередуются нажатия четных н нечетных пальцев; таким образом ускоритель имеет позиции от 1-й до 99-й.
Трамвай типа Татра Т-3
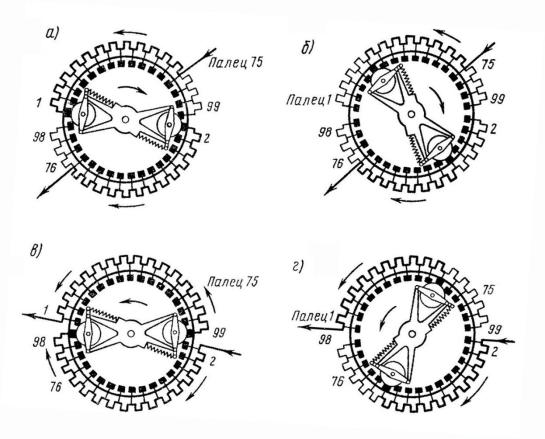
В начале пуска вагона ускоритель находится на 1-й позиции. Ток идет на вывод, соединенный с 75-м пальцем (рис.а) , по нечетным элементам реостата до 1-го пальца, прижатого к токосъемному кольцу, далее по токосъемному кольцу до 2-го пальца, затем по четным элементам реостата на вывод 76-го пальца. Крестовина ускорителя, вращаясь в направлении от 1-й к 99-й позиции по мере увеличения скорости вагона прижимает к токосъемному кольцу поочередно 3, 4, 5-й (и т. д.) пальцы, выводя пусковой реостат из цепи тягового электродвигателя (рис.б). На 75-й позиции ток по ускорителю идет, минуя реостат, с 75-го пальца по токосъемному кольцу на 76-й палец.
При электрическом торможении ток по реостату ускорителя идет в обратном направлении: на вывод 2-го пальца (рис.в) по четным элементам реостата до прижатого к токосъемному кольцу пальца (при большой скорости движения вагона замкнуты 98-й и 99-й пальцы), по токосъемному кольцу через замкнутый нечетный палец, по нечетным элементам реостата на вывод 1-го пальца. По мере уменьшения скорости вагона двигатель ускорителя РМ вращает крестовину в направлении от 99-й к 1-й позиции (рис. г), вследствие чего тормозной реостат выводится. При выбеге вагона ускоритель работает так же, как и при торможении, но крестовина вращается с меньшей скоростью.
Схема прохождения тока в цепи на позициях ускорителя в начале пуска (а), при разгоне (б), в начале торможения (в), при торможении (г)