

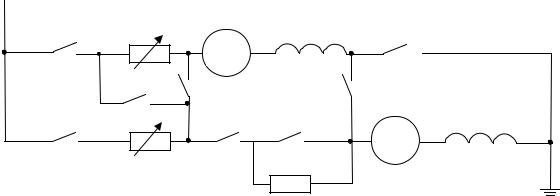
Последовательно-параллельное соединение
Тяговые машины соединяют в две независимые группы, включенные параллельно. Каждая группа состоит из последовательно включенных двух тяговых машин и
импульсного |
регулятора. |
Напряжение на |
каждой тяговой |
машине при работе регулятора с |
|
=1 составляет, |
UД U |
|
2 |
что позволяет использовать тяговые машины с номинальным напряжением, равным половине номинального напряжения контактной сети.
Каждый регулятор работает с частотой f, причем последовательность импульсов одного регулятора смещена на половину периода относительно импульсов, создаваемых другим регулятором. В результате частота пульсаций напряжения на конденсаторе фильтра удваивается по сравнению с частотой пульсаций тока в одной из групп тяговых машин, а масса и габаритные размеры фильтрового конденсатора значительно меньше, чем при последовательном соединении тяговых машин, где удвоения частоты на конденсаторе фильтра не происходит. Кроме того, в рассматриваемой схеме уменьшается опасность возникновения разносного буксования, что позволяет реализовать большую силу тяги при пуске. При одинаковой мощности тяговых машин в схемах а и б мощность регулятора V1 и суммарная мощность регуляторов V11 и V12 также будут одинаковыми.
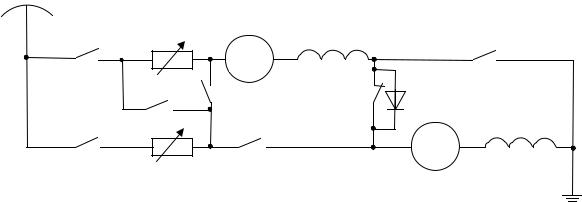
Параллельное соединение
В этом случае образуются четыре независимые группы, в каждой из которых тяговая машина через преобразователь подключена к контактной сети. При работе преобразователя с =1 к тяговой машины будет приложено напряжение контактной сети Uд=U. Нужна тяговая машина с номинальным
напряжением, равным номинальному напряжению контактной сети (в режиме тяги). Но, такая машина имеет значительно большие массо-габаритные показатели, чем тяговая машина с Uд=U/2 и ее применение
для вагона метрополитена нерационально. Напряжение на тяговой машине можно уменьшить, изменив
режим работы импульсных регуляторов путем ограничения коэффициента максимального заполнения временного интервала на уровне max=0,4…0,6, что позволит использовать тяговые машины с Uд=U/2 .
Рассматриваемой схеме присущи следующие недостатки по сравнению со схемами а и б:
-значительное увеличение индуктивности, а, соответственно, и массы реакторов для ограничения пульсаций тока в цепи тяговой машины на допустимом уровне,
-увеличение числа коммутационных аппаратов и обратных диодов V2;
-импульсные регуляторы должны иметь больший диапазон регулирования, так как активное сопротивление цепи тяговой машины минимально.
Кроме того, практически вдвое возрастает масса импульсных регуляторов. Их число при параллельном соединении ТЭД в 2 раза больше, чем при последовательно-параллельном, а масса каждого преобразователя в обоих случаях примерно одинакова, так как элементы преобразователей рассчитывают на одинаковые максимальные напряжения и токи. Кроме того, увеличение индуктивности реакторов и числа импульсных регуляторов обуславливает значительное увеличение потерь энергии в этих элементах при параллельном соединении тяговых машин. Сравнение показателей массы силового электрооборудования вагонов с импульсными регуляторами показывает, что наиболее рациональным является применение схемы с последовательно-параллельным соединением тяговых машин.
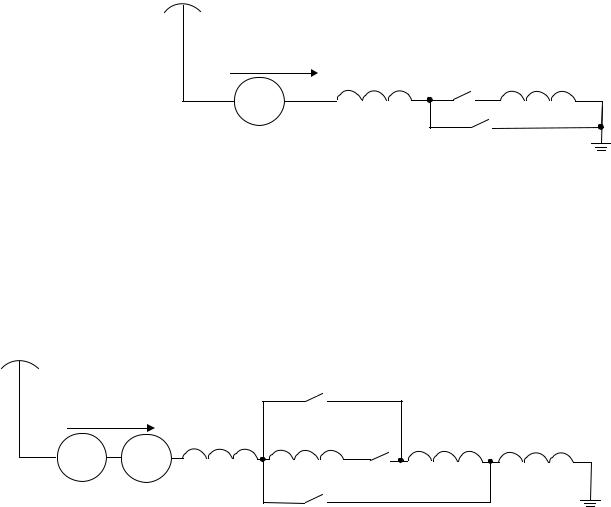
Независимо от системы импульсных преобразователей различают два способа их применения. В первом из них преобразователь включают только в периоды пуска и электрического торможения. После достижения напряжения на двигателях, равном или близком к номинальному, импульсный преобразователь шунтируется контактором и двигатели присоединяются к сети. Такая система возможна лишь в том случае, если тяговый двигатель или группа последовательно соединенных
двигателей рассчитаны на работу при напряжении контактной сети.
При втором способе импульсные преобразователи остаются включенными в течение всего времени работы тяговых двигателей, при этом номинальное напряжение цепи двигателей может отличаться от напряжения тяговой сети. В этом случае импульсный преобразователь, который работает в течение всего времени включения двигателей, получается более тяжелым и дорогим, чем при использовании его только при пуске и электрическом торможении, но при этом более полно можно реализовать преимущества импульсного управления, устраняется влияние на тяговые двигатели колебаний напряжения и перенапряжений в тяговой сети.
Способы перегруппировки тяговых электродвигателей
Наряду с использованием пусковых сопротивлений для изменения напряжения на ТЭД для многодвигательных схем применяют изменение группировки двигателей. Известны следующие способы перегруппировки:
•коротким замыканием;
•шунтированием ТЭД резистором;
•использованием диодов;
•переходом по схеме моста.
Способы перехода отличаются друг от друга по количеству необходимых для их осуществления аппаратов и плавностью процесса перехода. Например, переход по схеме моста характеризуется изменениями сил тяги в процессе отдельных переключений, которые сопровождают этот переход. Эти изменения по возможности должны быть минимальными. Указанные способы перехода рассчитаны на частичное или полное сохранение силы тяги в момент перехода.
Переход коротким замыканием с отключением одного или нескольких ТЭД на современном электроподвижном составе не применяется вследствие тяжелых условий работы двигателей в режиме короткого замыкания и значительных потерь силы тяги.
Перегруппировка двигателей шунтированием ТЭД резистором
1 |
RП1 |
ТЕД 1 |
ОВ1 |
в |
8 |
|
|
||||
|
|
|
|
|
3 4
7
2 |
RП2 |
5 |
6 |
а |
ОВ2 |
|
ТЕД 2 |
||||
|
|
|
|
|
RШ
Последовательность перегруппировки:
-исходное состояние контакторы 1,3,4 и 7 замкнуты – ТЭД1 и ТЭД2 соединены последовательно;
-размыкание контактора 3 – введение реостата Rп1 (интервал t1-t2);
-замыкание контактора 5 – шунтирование ТЭД1 резистором Rш (интервал t2-t3);
-размыкание контактора 7 – отключение двигателя ТЭД1 (интервал t3-t4);
-замыкание контактора 2 – параллельное включение Rп1 и Rп2 (интервал t4-t5);
-замыкание контактора 6 и 8 – отключение Rш и подключение ТЭД1 (интервал t5-t6).
Всхеме пусковые реостаты разделены на две группы. Используются переключатели реостатов, показанные на схеме в виде переменных сопротивлений. Каждый двигатель в схеме может представлять группу последовательно включенных двигателей, которые не переключаются. На последней позиции последовательного соединения пусковые реостаты шунтированы контакторами 1, 3 и 4. Необходимая последовательность действия контакторов осуществляется введением в их цепь управления взаимных блокировок.

Перегруппировка двигателей шунтированием ТЭД резистором
Ток и сила тяги при переходе способом шунтирования ТЭД резистором
Переход происходит при относительно небольшом изменении силы тяги подвижного состава. Такой переход способом шунтирования двигателя используют на современных электровозах постоянного тока с реостатным регулированием ТЭД.
Перегруппировка двигателей с использованием диодов
1 |
RП1 |
|
ОВ1 |
6 |
|
|
ТЕД 1 |
||
|
|
|
|
|
|
3 |
4 |
7 |
Д |
|
|
|||
|
|
|
|
|
2 |
RП2 |
|
5 |
ОВ2 |
|
|
ТЕД 2 |
||
|
|
|
|
Операцию перегруппировки можно значительно упростить, а время переключения уменьшить, применив диоды для отключения последовательного соединения.
Последовательность перехода на параллельное соединение:
-исходное состояние контакторы 1, 2, 3, и 4 замкнуты – ТЭД1 и ТЭД2 соединены последовательно;
-размыкание контактора 7 – в цепь вводятся диод Д;
-размыкание контактора 3 – в цепь двигателей вводится параллельно включены реостаты Rп1 и Rп2;
-замыкаются контакторы 5 и 6 – переход на параллельное соединение.
Диод Д при этом обеспечивает разделение параллельных ветвей двигателей.
При одновременном замыкании контакторов 5 и 6 снижение тока в силовой цепи связано только с предварительным введением реостатов. Если эти контакторы замыкаются не одновременно, то ток в цепи этого двигателя снижается, однако наличие индуктивности уменьшает этот процесс и при небольшой разнице замыкания контакторов не происходит существенного изменения силы тяги.
Диод Д обозначает группу вентилей, включенных определенным образом с учетом тока и напряжения в этой цепи. При продолжительном режиме работы последовательно соединенного диода Д, он шунтируется контактором 7. При вентильном переходе значительно упрощается силовая схема и операции перегруппировки ТЭД, а также уменьшаются потери силы тяги и продолжительность ее снижения. Обратный переход с параллельного на последовательное группировки двигателей осуществляется отключением контакторов 5 и 6, в результате чего автоматически восстанавливается цепь через диод Д.
Этот способ перехода используется на электровозах постоянного тока и может быть применен на трамвайных вагонах при модернизации их электрических схем.

Перегруппировка двигателей с использованием диодов
Перегруппировка двигателей по схеме моста
Уменьшение силы тяги при переключении ТЭД можно свести к минимуму при использовании схемы моста во время перехода. Эта схема получила наибольшее распространение на моторных вагонах метрополитена и электропоездах постоянного тока, а также на пассажирских электровозах.
После выключения всех секций реостатов на последовательном соединении в схеме мостового перехода параллельно каждому ТЭД включается секция пускового реостата с одинаковым сопротивлением R; обе цепи двигателей и реостатов связаны между собой (контактор М замкнут). После отключения контактора М выполняется переход на параллельное соединение с полностью введенными реостатами в
цепи каждого ТЭД. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
При мостовой схеме ток от токоприемника протекает по двум цепям: через двигатели - ток I и |
|||||||||||||||||||||||||||||||||
через резисторы - ток Ir. Через мостовой контактор протекает уравнительный ток Iу=I-Ir, где |
Ir |
UКМ |
. |
|||||||||||||||||||||||||||||||||
Направление тока I |
|
|
зависит от разницы I-I |
. При I |
=I и I =0 имеем |
2R |
U КМ |
|
|
|
|
|
|
|
|
|
|
|
2R |
|||||||||||||||||
у |
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
r |
|
r |
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
В этом случае токораспределение в контурах такое же, как при |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
параллельном соединении двигателей с включением в цепь каждого из |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
них секций пусковых реостатов равного сопротивления. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Если соблюдается равенство 2R UКC |
I , контактор М выключается, не |
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
разрывая тока, и переход на первую реостатного характеристику |
|
|
|
|
|
|
|
|
|
|
|
|
Ir |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
параллельного соединения происходит без изменения силы тока и тяги ТЭД. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Но, это уравнение соответствует только определенному значению I и Uкм. |
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
V |
|
|
2 |
|
|
|
Баланс токов моста соответствует точке переключения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
скоростных характеристик двигателя на безреостатной |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
ступени последовательного соединения (кривая 1) и |
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
первой позиции параллельного соединения (кривая 2). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если перед моментом перехода |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I1>Ir, то ток уменьшается при |
|
|
Ir |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
переходе к IR=I'1, соответственно |
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
уменьшается и силы тяги. Если |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I2<Ir, то при переходе ток |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
увеличивается до значения I'2 и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
соответственно возрастает сила |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
I2 |
I2 |
’ IR I1’ |
I1 |
I |
|
тяги. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Управление возбуждением ТЭД
Процесс пуска подвижного состава городского электрического транспорта можно разделить на две стадии: первую, при которой выводятся пусковые сопротивления, и вторую, когда изменяется величина возбуждения ТЭД. Подвижной состав городского электрического транспорта работает в режимах частых пусков и остановок. Величина потерь в пусковых реостатах зависит от величины пускового тока, ускорения и скорости выхода на естественную автоматическую характеристику. Эта скорость, при прочих равных условиях, обратно пропорциональна магнитному потоку двигателей. Поэтому на подвижном составе городского электрического транспорта нашли применение ТЭД с широким диапазоном регулирования скорости путем изменения магнитного потока. Это обеспечивает значительное уменьшение потерь электроэнергии в пусковых реостатах и расширяет область экономического регулирования скорости изменением возбуждения. Они выполняются с малым насыщением магнитной цепи при номинальном режиме и с большим воздушным зазором. При одинаковой силе тяги в области высоких скоростей и ослабленном поле они позволяют получить более низко расположенную скоростную характеристику при полном поле. Режим полного поля ТЭД обычно кратковременный, поэтому обмотка возбуждения в этом режиме может быть рассчитана на работу с перегрузкой. Номинальным режимом, при котором обмотка возбуждения может быть рассчитана на длительный ток, может быть принято ослабление поля, например, на 50%. В двигателях смешанного возбуждения при полном поле создаются перегрузки обмотки параллельного возбуждения.
Регулирование скорости при ослаблении поля можно выполнять одним из следующих способов:
-отключением части витков обмотки последовательного возбуждения;
-параллельным присоединением к обмотке последовательного возбуждения шунтирующих резисторов;
-регулированием величины тока в обмотке параллельного возбуждения (в ТЭД смешанного возбуждения);
-комбинацией первых двух способов;
-регулированием возбуждения с помощью специального возбудителя;
-импульсным регулированием возбуждения (при использовании преобразователей).
Управление возбуждением ТЭД
Секция ОВ, которая отключается, должна быть отсоединена от цепи, иначе она окажется замкнутой накоротко и при резких изменениях тока ТЭД в ней будет наводиться ЭДС взаимоиндукции, как во вторичной обмотке трансформатора. Поскольку ОВ закорочена, то в ней возникают ток и намагничивающая сила, которая будет направлена встречно потоку возбуждения оставшейся обмотки.
I |
|
|
WC1 |
1 |
WC2 |
ТЕД |
|
|
|
2 |
|
|
|
В результате будет задерживаться процесс изменения магнитного потока и при резких колебаниях напряжения в контактной сети может быть нарушены нормальная коммутация и возникнуть круговой огонь на коллекторе ТЭД.
Способ регулирования скорости отключением части витков ОВ применяют обычно при относительно неглубоком ослаблении поля, когда ослабление выполняется одной степенью.
При многодвигательных схемах можно уменьшить процесс колебания силы тяги, если выполнять отключения обмоток по очереди. При этом если двигатели соединены последовательно - будет значительная разница в напряжениях якорей, а если параллельно, то возникает разность токовых нагрузок.
2
I |
|
|
|
|
WC11 |
WC12 |
1 |
WC21 |
WC22 |
ТЕД1 ТЕД2 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
Двухступенчатый переход: в начале включается контактор 2 и отключается контактор 1, выводя часть витков обмотки двигателя первой, а затем включается контактор 3 и отключается контактор 2, выводя часть витков второго двигателя. Здесь первая степень ослабления поля используется как переходная.