

suep_metod_sem2 / suep_metod_sem2 / 6 - СУЭП на основе СД
.pdfРаздел 6. СУЭП на основе CД
6.7. Система регулирования скорости вентильного двигателя на основе СДПМ
Функциональная схема САР
Формирование заданных значений фазных токов i* , i* , i* выполняется в функции соответствующих сигналов id* , iq* посредствомA B C двухступенчатого координатного преобразования (ПК и ПФ).
Угол поворота ротора в электрическом пространстве R получают с помощью ДПР, установленного на одном валу с основным двигателем таким образом, чтобы сигнал на его выходе был бы равен нулю в том случае, когда ось d систем координат ротора совпадает по направлению с осью стационарной системы координат статора.
Узел задания токов УЗТ формирует заданные значения составляющих тока статора в системе координат ротора. В зависимости от типа СДПМ (с явнополюсным или неявнополюсным ротором) и требований к ЭП применяются различные стратегии задания тока.
Регулятор скорости РС формирует задание на момент двигателя.
Наиболее распространенная стратегия управления СДПМ заключается в том, что момент М, развиваемый двигателем, должен обеспечиваться при минимальном значении модуля тока статора двигателя:
ISm id2 |
iq2 |
min |
(26) |
|
|
|
|
что позволяет достичь наилучших энергетических показателей ЭП.

Раздел 6. СУЭП на основе CД
6.7. Система регулирования скорости вентильного двигателя на основе СДПМ
Стратегия задания тока СДПМ с неявнополюсным ротором
Поскольку для СДПМ с неявнополюсным ротором характерно Ld Lq , то выражение момента (25) приводится к виду:
M 32 z p f iq (25а)
т.е. при условии f const момент пропорционален составляющей iq тока статора и не зависит от составляющей id.
Следовательно, для достижения условия (26) необходимо обеспечить принудительное обнуление d-составляющей тока статора за счет формирования соответствующего сигнала задания:
id* 0 |
(27) |
При этом, как видно из выражения (25а), составляющая тока iq приобретает смысл моментообразующей,
следовательно, описанный алгоритм управления соответствует векторному управлению.
2
 3zp f
3zp f 
 Соответствующая структура УЗТ
Соответствующая структура УЗТ

Раздел 6. СУЭП на основе CД
6.7. Система регулирования скорости вентильного двигателя на основе СДПМ
Стратегия задания тока СДПМ с неявнополюсным ротором Рассматривая (23), (24) в установившемся режиме (принято Ld Lq LS ):
u |
d |
R i |
d |
|
L i |
q |
; |
|||
|
S |
|
|
|
R S |
|
|
|||
u |
|
R i |
|
|
|
|
L i |
|
|
|
q |
q |
|
d |
E, |
||||||
|
S |
|
R S |
|
||||||
можно построить векторную диаграмму
|
Векторная диаграмма СДПМ с |
|
неявнополюсным ротором при id 0 |
R LSiq RSiq
|
E |
|
|
Векторная диаграмма отражает |
|
|
|
|
|
взаимное расположение векторов: |
|
|
IS iq |
|
|
потокосцепления постоянных |
|
US |
90 |
|
магнитов f, ЭДС вращения E, |
||
|
|||||
|
|
|
напряжения US и тока IS статора. |
||
|
|
|
|
||
|
|
f |
R |
||
|
|
|
|||

Раздел 6. СУЭП на основе CД
6.7. Система регулирования скорости вентильного двигателя на основе СДПМ
Стратегия задания тока СДПМ с явнополюсным ротором Для такого СДПМ Ld Lq , и момент формируется по (25).
Так как получение одного и того же значения момента возможно при разных соотношениях составляющих id, iq, то достижение условия (26) означает выбор из возможных соотношений такого, при котором обеспечивался бы минимум модуля вектора тока статора ISm.
Пользуясь (25), можно для заданного значения момента рассчитать требуемые токи id и iq  (тонкие линии)
(тонкие линии)
Затем для каждой зависимости определяется точка, в которой обеспечивается условие (26). В результате получается линия 0abcd
Кривая требуемого соотношения оставляющих тока статора для СДПМ с явнополюсным ротором

Раздел 6. СУЭП на основе CД
6.7. Система регулирования скорости вентильного двигателя на основе СДПМ
Стратегия задания тока СДПМ с явнополюсным ротором
Линия 0abcd, в свою очередь, может быть представлена в виде пары зависимостей требуемых значений составляющих тока в функции заданного момента.
Соответствующая структура УЗТ
Раздел 6. СУЭП на основе CД
6.8. Система двухзонного регулирования скорости на основе СДПМ
Стратегия задания тока (для СДПМ с неявнополюсным ротором)
Непосредственное регулирование потокосцепления ротора СДПМ невозможно. Но на высоких скоростях ЭДС E R f близка к максимально возможному значению напряжения на статоре (оно ограничено максимальным напряжением АИН), запас по напряжению мал, и появляются ограничения по динамическому току и моменту в переходных режимах, что ухудшает динамику привода.
|
q |
|
R LSiq |
RSiq |
|
RSid |
||
E |
||
|
||
R LSid |
iq |
|
|
IS |
US
|
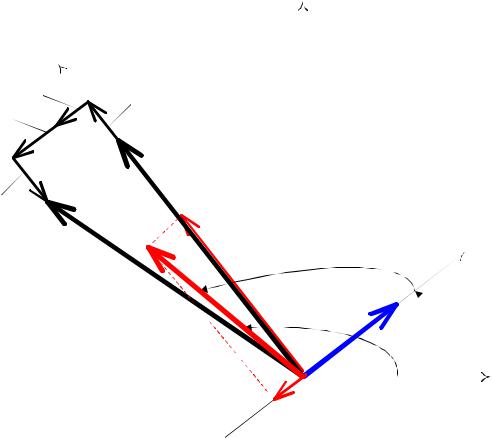
Во избежание этого на высоких скоростях |
|
|
|
применяют принудительное «ослабление |
|
потока» за счет задания отрицательной |
|
составляющей вектора тока статора по оси d. |
90 |
d |
f R
R
id
 Векторная диаграмма СДПМ с неявнополюсным ротором при id 0
Векторная диаграмма СДПМ с неявнополюсным ротором при id 0
Наличие составляющей R LS id
при id 0 приводит к уменьшению напряжения US при том же значении ЭДС.

Раздел 6. СУЭП на основе CД
6.8. Система двухзонного регулирования скорости на основе СДПМ
Стратегия задания тока
Очевидно, что применение описанной стратегии задания тока приводит к увеличению суммарного тока статора при конкретном значении момента нагрузки.
Конкретное значение тока id может быть найдено в результате решения нелинейного уравнения для модуля вектора напряжения статора, полученного из (23) и (24):
USm 
 RSid RLSiq 2 RSiq RLSid E
RSid RLSiq 2 RSiq RLSid E
Учитывая, что ток iq определяется моментом нагрузки, а ЭДС E – скоростью > H, с учетом ограничений
USm USm.H
ISm 
 id2 iq2 ISm.H
id2 iq2 ISm.H
можно определить требуемое значение id.

Раздел 6. СУЭП на основе CД
6.8. Система двухзонного регулирования скорости на основе СДПМ
Функциональная схема
R
Структура силовой части (на основе АИН с ШИМ, управляемого током) и организация управления фазными токами аналогична однозонной системе.

Раздел 6. СУЭП на основе CД
6.8. Система двухзонного регулирования скорости на основе СДПМ
Функциональная схема
Отличие данной системы от однозонной СУЭП на основе СДПМ состоит в следующем:
1) Задание тока выполняется в полярной системе координат, преобразователь ПК1 вычисляет заданные значения составляющих в неподвижной системе координат:
i* |
I * |
cos ** |
i* |
I* |
sin ** |
|
Sm |
|
|
Sm |
|
которые затем преобразуются к заданным значениям фазных токов.
2) формирование сигналов обратных связей предусматривает дополнительные координатные преобразования – фазные токи преобразуются в неподвижную систему координат, затем выполняется векторный анализ тока статора (ВА) согласно выражений:
I |
Sm |
i2 |
i2 |
arctg i |
|
|
|
i |
|
|
|
|
|
3) внешняя часть системы регулирования предусматривает организацию контуров регулирования момента и скорости двигателя, для чего предусмотрена идентификация момента двигателя (блок ИМ) согласно выражения:
ˆ |
|
3 |
ˆ |
3 |
z p f ISm sin R |
3 |
z p f ISm sin |
M |
2 |
z p f iq |
2 |
2 |
|||
|
|
|
|
|
Выходной сигнал IS* регулятора момента воздействует на входы блока БВМ и блока выделения знака РЭ, формирующего сигнал знака тока статора sign IS* 1

Раздел 6. СУЭП на основе CД
6.8. Система двухзонного регулирования скорости на основе СДПМ
Функциональная схема
4) Заданное угловое положение вектора тока статора формируется в соответствии с выражением:
**  *
* sign IS* R R
sign IS* R R
где * – заданное угловое положение вектора тока статора относительно оси d;
R – текущее угловое положение ротора (с выхода ДПР), соответствующее текущему положению оси d (и соответственно, вектора f);
R – сигнал, пропорциональный частоте вращения ротора и запаздыванию АИН (зависящем от частоты ШИМ), вводимый в систему регулирования для компенсации запаздывания АИН.
Формирования угла * выполняется с помощью функционального преобразователя ФП, реализующего зависимость * f
При работе на скорости, не превышающей номинального значения, сигнал на выходе ФП соответствует  *
* 90 , чем задается равенство нулю составляющей тока id.
90 , чем задается равенство нулю составляющей тока id.
При H задание угла * растет, что приводит к появлению отрицательной составляющей id (см. векторную диаграмму).