

suep_metod_sem2 / suep_metod_sem2 / 5.9 - Система скалярного частотного управления с ОС по скорости
.pdfСистема скалярного частотного управления с ОС по скорости
Функциональная схема системы представлена на рис.4.43. Система ис- |
||||||||||||
пользуется при повышенных требованиях к точности системы, и используется, |
||||||||||||
например, в приводах фирмы Siemens. |
|
|
|
|
|
|
|
|||||
В системе, помимо непосредственного задания частоты от ЗИ, дополни- |
||||||||||||
тельно присутствует канал коррекции, включающий узел сравнения, регулятор |
||||||||||||
скорости РС и блок ограничения БО. Этот канал функционально аналогичен |
||||||||||||
каналу компенсации статизма, но за счет соответствующего выбора параметров |
||||||||||||
РС здесь можно добиться любой степени (вплоть до полной) компенсации ста- |
||||||||||||
тизма, не прибегая при этом к точному определению значения активного тока |
||||||||||||
статора двигателя. Формирование сигнала задания на скорость UЗ.с UЗ. f |
z p |
|||||||||||
выполняется с помощью блока согласования БУ. |
|
|
|
|
|
|
||||||
|
|
|
|
|
~ |
|
Пусть при отсутствии |
|||||
|
|
|
|
|
статического момента (МС=0) |
|||||||
|
|
|
|
|
|
|||||||
|
|
|
|
Uу.f |
ПЧ |
двигатель работает в режиме |
||||||
|
|
|
ФП |
|
идеального холостого |
хода |
||||||
|
UЗ.f |
|
|
|
со скоростью 00, соответст- |
|||||||
UЗ ЗИ |
|
|
Uу.U |
|
||||||||
|
|
|
вующей (пропорциональной) |
|||||||||
|
|
|
|
|
|
некоторой величине сигнала |
||||||
|
БУ |
|
БО UРС |
|
|
задания UЗ.C UЗ.C0 . Ампли- |
||||||
UЗ.c |
|
|
|
туда выходного напряжения |
||||||||
РС |
|
|
|
|||||||||
|
|
|
|
M |
ПЧ |
при |
этом |
равна USm0 , |
||||
|
|
|
|
|
||||||||
Uд.с |
|
|
|
частота – |
fS 0 . |
|
|
|
||||
|
|
|
|
|
|
|
||||||
|
|
|
|
ДС |
|
|
Дальнейший |
принцип |
||||
|
|
|
|
работы системы рассмотрим |
||||||||
Рис.4.43.Функциональная схема системы |
||||||||||||
с |
помощью |
зависимостей |
||||||||||
|
скалярного частотного управления |
рис.4.44. |
|
|
|
|
||||||
|
|
с ОС по скорости. |
|
|
|
Пусть нагрузка на валу |
||||||
|
|
|
|
|
|
АД увеличилась, например, |
||||||
до значения МС1 |
на рис.4.44а. При этом за счет просадки скорости увеличится |
|||||||||||
сигнал рассогласования UЗ.C Uд.с , который пропорционален абсолютному |
||||||||||||
скольжению двигателя sa s SH |
z p 00 . |
Сигнал на выходе регулятора |
||||||||||
скорости РС, суммируясь с сигналом UЗ.C , обеспечивает увеличение сигнала |
||||||||||||
управления U y. f |
, при котором частота выходного напряжения будет |
fS1 fS 0 . |
||||||||||
Одновременно с изменением частоты за счет ФП изменится и амплитуда выходного напряжения ПЧ – от USm0 до USm1 (рис.4.44б). При этом скорость дви-
гателя увеличивается. Можно добиться абсолютной жесткости механических характеристик (линия 1 на рис.4.44а), если в РС ввести интегральную составляющую, которая позволит обеспечить повышение частоты до уровня fS1 fS 0 1 sa , при этом скорость двигателя восстановится до заданного зна-
чения 00.
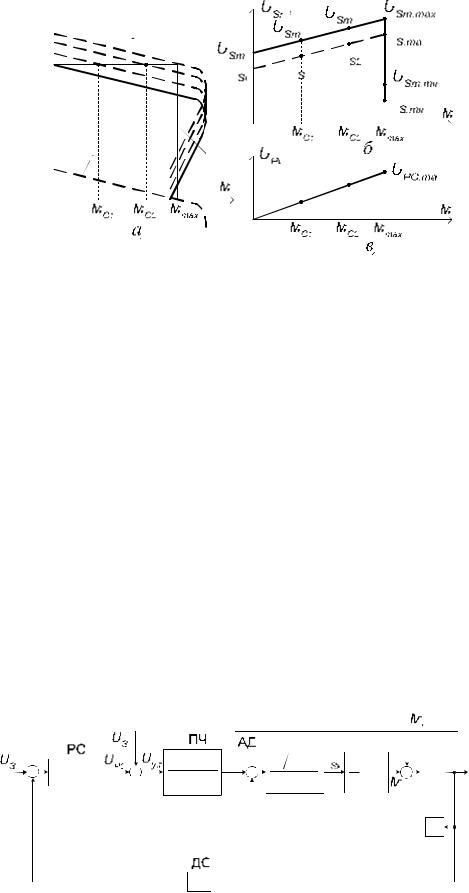

0max0100
0min
Рис.4.44. Механические характеристики (а), зависимости выходного напряжения и частоты ПЧ (б) и выходного напряжения РС (в) в функции момента в системе скалярного частотного управления с ОС по скорости.
Аналогично произойдет восстановление заданной скорости и при дальнейшем увеличении нагрузки – например, до значения МС2 на рис.4.44а.
При этом возможности восстановления скорости до заданного значения, разумеется, имеют место лишь в некотором допустимом диапазоне изменения нагрузки – от 0 до Mmax (см. рис.4.44в). Поэтому на выходе РС устанавливают блок БО, ограничивающий влияние канала компенсации скольжения при больших нагрузках. При этом в работу должен вступить канал токоограничения, выполняемый по схеме, рассмотренной ранее, который обеспечит снижение амплитуды и частоты напряжения статора до значений U и fS. min
(рис.4.44б), которым соответствует характеристика 3 (рис.4.44а). При этом область рабочих точек в первом квадранте ограничивается справа прямой 2 (рис.4.44а).
Параметры РС могут быть определены на основании упрощенной структурной схемы системы, представленной на рис.4.45. Преобразователь частоты представлен коэффициентом усиления k по каналу задания частоты и эквива-
лентной малой инерционностью T этого канала.
|
k |
S |
|
|
|
|
|
|
|
|
WPC p |
Rдв |
3 |
|
1 |
|
|||||
T p 1 |
|
Te p 1 |
|
2 zp |
|
Jp |
|
|||
|
|
|
|
|
|
R |
|
|
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
zp |
||||
kд.с
Рис.4.45. Упрощенная структурная схема системы с ОС по скорости.
Учитывая высокую жесткость характеристик в системе, можно считать, что задающее воздействие
UЗ. f S.З |
k |
достаточно точно компенсирует влияние внутренней обратной связи двигателя по фактической частоте вращения поля ротора.
Поэтому ПФ объекта регулирования для контура скорости:
|
W |
p |
U |
д.с |
p |
|
k |
|
k |
д.с |
1 z p |
, |
|
|
|
об |
U y. f |
p |
|
T p |
1 TM p Te p 1 |
|
|||||
|
|
|
|
|
|
||||||||
где T |
2 J |
Rдв – механическая постоянная времени двигателя. |
|||||||||||
M |
3 |
z2p 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Если отнести T и Te к малым некомпенсируемым постоянным времени, то пропорциональный РС может иметь передаточную функцию:
WPC p |
TM z p |
kPC , |
|
k kд.сTC |
|
причем значение TC |
из-за влияния неучтенных параметров двигателя следует |
|
выбирать равной |
|
|
TC 4T .
Введение интегральной составляющей в РС приведет к астатизму системы по возмущающему воздействию (механические характеристики будут абсолютно жесткими). При этом получится ПИ-регулятор скорости с ПФ
TC2 p 1 |
|
|
1 |
|
|
|
WPC p kPC T |
p |
|
|
T |
|
, |
kPC 1 |
p |
|||||
C2 |
|
|
|
C2 |
|
|
где TC2 – постоянная времени интегральной части.