

attachments / ШПУ_2012
.pdfОсновные аппараты защиты и контроля работы ЭП ШПУ
Важнейшим требованием к ЭП и системе управления ШПУ является безопасность эксплуатации. Крупные клетевые установки перевозят по стволу одновременно до 100 человек. Остановка главного ствола крупной шахты, по которых полезное ископаемое перевозится в скипах ёмкостью от 40 до 50 т, существенно сказывается на производительности всей шахты. Система защиты подъёмной установки включает в себя комплект аппаратов защиты, каждый из которых реагирует на воздействие определённой аварийной ситуации и предохранительный тормоз, который является исполнительным органом всех аппаратов защиты.
Дисковый тормоз |
Колодочный тормоз |

Основные аппараты защиты и контроля работы ЭП ШПУ
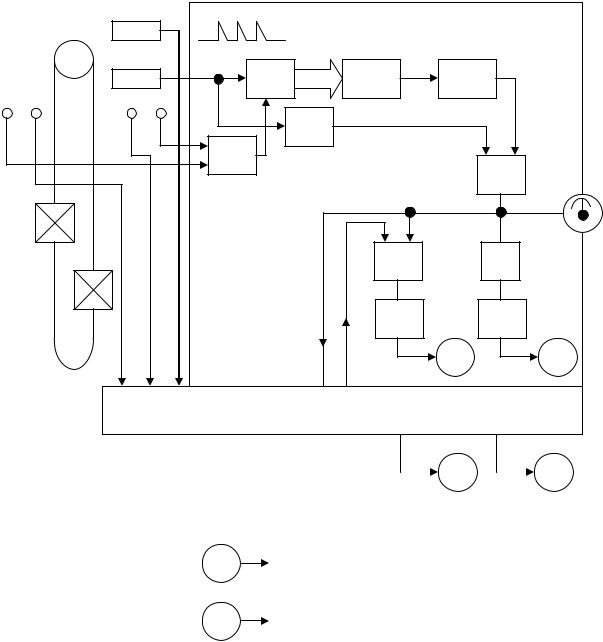
Входные контакты всех аппаратов защиты включены последовательно в цепь катушки контактора KM (предохранительный тормоз), контакт которого управляет клапаном тормозной системы. Все контакты аппаратов защиты в отсутствие аварийной ситуации замкнуты. Эта же цепь используется и для организации нулевой блокировки: включается контактор KM и подаёт напряжение в систему управления после перерыва в питании, контроллер SA0 в нейтральном положении, рукоятка рабочего тормоза SB2 − в положении “заторможено”, нажата кнопка SB1 (зарядка схемы).
+ |
|
- |
QF |
SA0 (КК-0) |
QF |
SB1 |
КМ |
|
|
|
Зарядка |
SB2 |
SB3 |
SB4 |
(ТП) |
|
||||
|
KR1 … Кri |
|||
|
(ВБТР) |
(АК) |
(АП) |
|
|
|
|
|
(Ai …) |
КМ |
КМ |
|
|
КМ |
(ТП) |
|
|
(ТП) |
|
(ТП) |
|
|
|
|
К системе управления ШПУ
Принципиальная схема цепи защиты ШПУ ВБТР – выключатель блокировки тормоза рабочего (снятие «зарядки»)
Основные аппараты защиты и контроля работы ЭП ШПУ
Каждая подъёмная машина в соответствии с правилами безопасности снабжается следующими основными аппаратами защиты и контроля:
1.Концевыми выключателями, срабатывающими при подъёме одного или другого подъёмного сосуда на 0.5 м выше крайнего положения, а также дублирующими выключателями, срабатывающими в этих положениях.
2.Ограничителем скорости, вызывающим разрыв цепи защиты в следующих
случаях:
− превышение в период замедления скорости защитной тахограммы, величина которой в каждой точке пути определяется из условия предотвращения аварийного переподъёма или жёсткой посадки на кулаки;
− превышение максимальной скорости на 15 %; − подход подъёмного сосуда к крайнему положению со скоростью 1 м/с для
клетевых подъёмников и 1.5 м/с для скиповых подъёмников.
3.Защитой от чрезмерного износа тормозных колодок.
4.Защитой от провисания каната и напуска каната в ствол при зависании опускающегося сосуда.
5.Блокировкой, позволяющей включить двигатель в случае переподъёма только в сторону ликвидации этого переподъёма.
ШПУ могут иметь и ряд других специфических защит, обусловленных конструкцией подъёмной установки.

Устройство защиты ШПУ от превышения скорости и пробуксовки канатоведущего шкива |
||||
Наиболее важным аппаратом по тяжести аварий, которые он предотвращает, |
||||
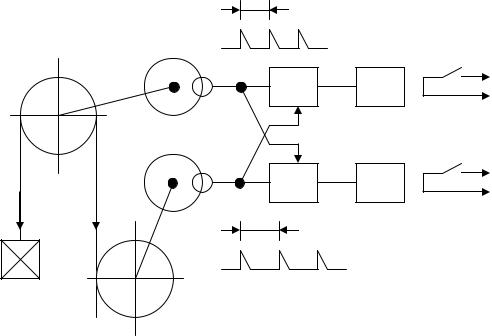
является релейный ограничитель скорости, наиболее распространённый типа РОС−5914. |
||||
Подъёмная машина ПМ оснащена тахогенератором постоянного тока BR и двумя |
||||
реостатами R1, R2, движки которых приводятся в движение от кулачков, расположенных на |
||||
ретардирующих дисках RD1 и RD2. Эти диски связаны с валом подъёмной машины и делают |
||||
не более 1 оборота за цикл подъёма. При подходе одного или другого сосуда к крайнему |
||||
|
|
|
В цепь защиты |
|
положению, кулачок на диске воздействует на ползунок соответствующего |
|
|||
реостата и уменьшает его сопротивление. |
|
|
KR1 |
KR2 |
В таком же темпе должна |
|
|
||
|
|
|
|
|
снижаться скорость. Если замедление идёт |
|
|
КR1 |
КR2 |
с недостаточным темпом, ток I |
+ |
|
||
|
|
|
||
увеличивается. Это приводит к |
|
|
I |
|
срабатыванию реле KR2, размыкающий |
LBR |
BR |
UBR |
|
контакт которого введён в цепь защиты. |
|
|
|
|
|
|
R1 |
VD1 |
|
Реле KR1 необходимо для контроля |
- |
|
||
|
|
|
||
максимальной скорости. Если |
|
|
R2 |
VD2 |
размыкающий контакт введён в цепь |
|
|
||
разрешения пуска машины. Реостаты R1 и |
|
|
|
|
R2 работают по очереди за счёт изменения |
ПМ |
|
|
|
полярности напряжения UBR в соседних |
|
RD1 |
RD2 |
|
циклах и наличие диодов D1 и D2. |
|
|
||
|
|
|
|
|
R1 |
R2 |
Принципиальная схема ограничителя скорости РОС - 5914
Устройство защиты ШПУ от превышения скорости и пробуксовки канатоведущего шкива
Такие устройства широко распространены на подъёмных установках, однако имеют ряд недостатков: малый масштаб по пути; низкая стабильность уставки срабатывания; недостаточный контроль максимальной скорости, так как реле KR1 имеет разброс уставки срабатывания; появление погрешностей (проскальзывание) на фрикционных ШПУ после ремонтных работ, поэтому на действующих установках обязательно требуются применение дублирующих ограничителей скорости.
В настоящее время получают всё больше распространение ограничитель скорости ОСПМ, имеющий комбинированную цифро-аналоговую схему (рис.). Аппарат имеет 2 независимых идентичных канала (I и II):
1)фотоэлектрический датчик импульсов, взаимодействующий с модулятором на окружности барабана (DU1 и DU2) для первого и второго канала соответственно;
2)герконовые датчики, установленные в стволе вначале участка замедления сосуда, идущего вверх (K1 и K2 − для первого канала, K3 и K4 − для второго канала).
Эти выключатели взаимодействуют с постоянными магнитами, закреплёнными на сосудах. Импульсы датчика DU с помощью функционального преобразователя частотанапряжение преобразуются в аналоговый сигнал действительной скорости vд. Кроме того, этот же датчик DU связан с реверсивным двоичным счётчиком РДС, направление счёта которого (сложение или вычитание) определяется информацией о направлении движения подъёмного сосуда, содержащегося в сигнале DU.
Устройство защиты ШПУ от превышения скорости и пробуксовки канатоведущего шкива |
|||||||||||||||
При помощи K1 и K2, |
а |
также |
|
DU2 |
|
|
|
|
|
||||||
логического |
устройства |
ЛУ |
на |
|
DU1 |
|
|
|
|
|
|||||
протяжении |
всего |
ствола |
от |
|
РДС |
ЦАП |
h |
|
|
||||||
|
|
√ |
|
||||||||||||
крайней нижней точки до точки |
К2 К4 |
К3 К1 |
|
ϑз |
|||||||||||
|
|
ϑд |
|
||||||||||||
установки |
выключателей |
(начало |
f/U |
|
|||||||||||
участка |
замедления) |
счётчик |
РДС |
|
|
|
|
|
|||||||
|
ЛУ |
|
|
|
|
||||||||||
удерживается в состоянии, когда |
|
|
|
|
УС |
||||||||||
|
|
|
|
|
|
||||||||||
в нём записан двоичный код |
|
|
|
|
|
|
|
||||||||
длины участка замедления. В |
|
|
I канал |
|
|
|
|
||||||||
момент |
срабатывания |
K1 |
|
(для |
|
|
|
УВК |
|
|
ПУ |
||||
первого скипа) или K2 (для |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|||||||||
второго скипа), РДС вступает в |
|
|
|
КR1 |
|
КR2 |
|||||||||
работу и работает на вычитание |
|
|
|
|
|||||||||||
при движении соответствующего |
|
|
|
|
|
1 |
2 |
||||||||
скипа вверх и на сложение при |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|||||||||
движении вниз. Т.о., текущий код |
|
|
|
II канал |
|
|
|
||||||||
в РДС соответствует пути, |
|
|
|
|
|
|
|
||||||||
который |
|
осталось |
|
пройти |
|
|
|
|
|
|
|
||||
данному |
скипу |
до |
|
верхнего |
|
|
|
|
|
1 |
2 |
||||
крайнего положения (координата |
Функциональная схема ограничителя скорости ОСПМ |
||||||||||||||
Н). |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
В цепь пуска |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
В цепь защиты |
|
|
|
|

Устройство защиты ШПУ от превышения скорости и пробуксовки канатоведущего шкива
При помощи ЦАП этот код непрерывно превращается в аналоговый сигнал h, который после извлечения корня превращается в сигнал скорости заданной тахограммы:
v3 = 2a3h = k h, |
а3 − замедление по заданной тахограмме. |
В устройстве сравнения УС сигналы vд и v3 сравниваются, и в случае vд>v3 происходит срабатывание порогового устройства ПУ, реле KR2 обесточивается, разрывая свой контакт в цепи защиты. Аналогично работает второй канал. В каждом из каналов имеется устройство взаимного контроля УВК, в котором сравниваются аналоговые сигналы с выхода УС первого и второго каналов. В случае недопустимого расхождения этих сигналов срабатывает реле контроля KR1, при этом заданный цикл разрешается завершить, а следующий пуск запрещается.
Ограничитель скорости ОСПМ имеет необходимый уровень надёжности. В случае проскальзывания каната на многоканатных машинах синхронизация аппарата обеспечивается автоматически в точке начала участка замедления за счёт установки герметичных контактных датчиков K1…K4 непосредственно в стволе.
Многоканатные подъёмные машины должны оснащаться защитой от пробуксовки канатоведущего шкива при неподвижных канатах. Эта защита должна срабатывать в случае перегрузки подъёмных сосудов или их застревания. Пробуксовка приводит к перегреву прессмассовой футеровки канатоведущего шкива и к её тепловому разрушению.
Применяемая в настоящее время аппаратура защиты работает на принципе сравнения перемещений навивочной поверхности шкива и канатов. Датчиком перемещения служит импульсный преобразователь, соединённый с валом подъёмной машины, а датчиком перемещения каната служит импульсный преобразователь, соединённый с отклоняющим шкивом.
Устройство защиты ШПУ от превышения скорости и пробуксовки канатоведущего шкива
|
|
|
С |
|
|
КШ |
|
Д1 |
|
|
|
|
|
|
|
|
|
|
|
|
СЧ1 |
РЗ |
В цепь |
|
|
|
Сброс |
защиты |
|
|
|
Д2 |
|
||
|
|
Сброс |
|
||
|
|
|
|
||
Fп |
F0 |
|
СЧ2 |
РК |
В цепь |
|
С |
|
сигнализации |
||
|
|
|
|
|
|
ОШ
Функциональная схема аппарата защиты от пробуксовки канатоведущего шкива
Реальная уставка такого аппарата защиты определяется коэффициентом пересчёта счётчиков и квантом путевых импульсов. Допустимый из условия перегрева футеровки путь скольжения каната определяется из теплового баланса работы трения и работы, необходимой для разогрева футеровки до её размягчения. При условии допущений, идущих в запас, опасная пробуксовка составляет около 20 м. При движении подъёмного сосуда вниз иногда происходит его застревание (зависание), которое обусловлено дефектом направляющих или искривлением ствола, а также при попадании посторонних предметов на проводники. В случае многоканатной подъёмной машины застревание сосуда вызывает пробуксовку канатоведущего шкива и срабатывания описанной выше защиты.
Устройство защиты ШПУ от превышения скорости и пробуксовки канатоведущего шкива |
||||||
На ШПУ, оснащённых барабаном, зависание опускающегося сосуда приводит к |
||||||
напуску каната в ствол. Срыв сосуда при этом сопровождается разрушением каната. К |
||||||
сожалению, до сих пор надёжных устройств защиты от напуска канатов не существует, и |
||||||
проблема требует своего решения. Поскольку клети ШПУ оборудованы парашютами, такие |
||||||
аварии исключены. На скиповых установках случаи обрыва каната часто приводят к |
||||||
значительным простоям шахт. |
|
|
|
|
|
|
В цепи защиты обычно включено большое количество контактов (10−15) различных |
||||||
аппаратов. Отыскать причину разрыва цепи защиты и предохранительного торможения |
||||||
зачастую бывает трудно. В настоящее время создаются диагностические системы для ШПУ, |
||||||
которые в числе других задач решают задачу: какой из аппаратов защиты вызвал |
||||||
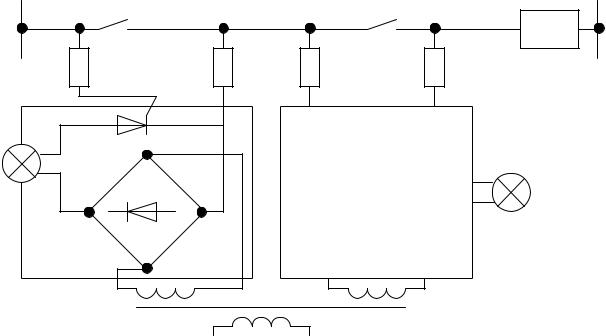
предохранительное торможение. На рис. |
вариант |
схемы |
отбора |
информации |
||
непосредственно от цепи защиты. |
|
|
КМ |
- |
|
|
+ |
Ki |
|
Ki+1 |
|
||
|
|
|
ТП |
|
||
|
|
|
|
|
|
|
|
R |
R |
R |
R |
|
|
|
|
|
|
R ≥ 50 кОм |
|
|
|
VS |
|
|
|
|
|
ELi |
UD |
|
|
|
|
|
|
|
|
|
ELi+1 |
|
|
|
|
|
|
TV |
|
|
Схема отбора информации непосредственно от цепи защиты |
|
|||||
Модернизация электропривода и автоматизация шахтных подъемных установок
Требования к ЭП и автоматике подъемных установок.
Эти требования, имеющие рекомендательный характер, можно разделить на три группы:
–требования к функциям систем управления и автоматизации;
–требования к аппаратуре управления, ее конструктивному исполнению и размещению в здании подъемной машины;
–требования к аппаратам и схемам защиты, блокировки и сигнализации.
Система управления и автоматизации должна удовлетворять следующим требованиям:
1.Предусматривать способы управления:
-автоматическое – цикл выполняется автоматически после получения разрешающих сигналов от аппаратов, контролирующих процессы разгрузки и загрузки подъемных сосудов;
-дистанционное – цикл выполняется автоматически по сигналам оператора загрузочного устройства или опрокида;
-местное – цикл выполняется автоматически по команде машиниста подъемной
машины;
-ручное – управление осуществляется машинистом подъемной машины. Автоматическое управление является основным. Остальные способы управления
следует рассматривать, как вынужденные, и применять их только в процессе выполнения пуско-наладочных работ или на период времени, необходимый для устранения неполадок, препятствующих автоматическому управлению.