

attachments / ШПУ_2012
.pdfЭлектропривод постоянного тока по системе ТП-Д
На подъемных установках применяются тиристорные преобразователи различные по способу организации реверса вращения двигателя
-с реверсом тока в якоре двигателя
-с реверсом тока в обмотке возбуждения.
На скиповых подъемах применяется реверс тока в обмотке возбуждения, а на клетевых – реверс тока якоря.
Реверс тока в якоре обеспечивает необходимое качество управления подъемом, но требует в два раза большее количество силовых тиристоров, две группы которых включены встречно друг другу.
Реверс тока в обмотке возбуждения требует 3-4 кратных форсировок по напряжению, что иногда не обеспечивает необходимое качество управления двигателем.
Наибольшее распространение получили нереверсивные тиристорные преобразователи, применяемые на грузовых подъемах в комплекте с тиристорными возбудителями ТПР9-320/ 460Р для реверса поля двигателя.
В приводе по системе ТП-Д применяются подъемные двигатели серии П2 с шихтованной станиной для уменьшения постоянной времени цепи возбуждения. В системах с нереверсивными якорными преобразователями обмотки возбуждения двигателей были пересоединены в две параллельные цепи (т. е. на напряжение 110 В). Для этих условий и при номинальном напряжении возбудителя 460 В полное время реверса возбуждения двигателей составляет около 2 с.
Электропривод постоянного тока по системе ТП-Д
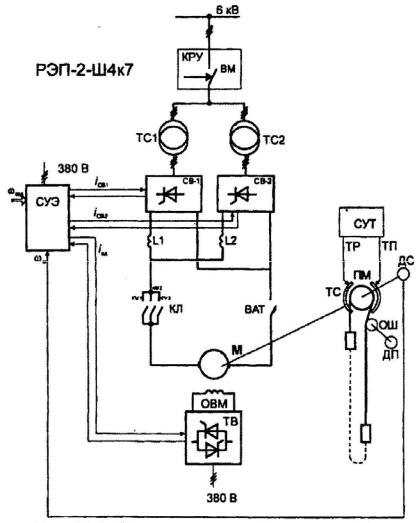
Нереверсивные вентильные секции СВ- 1 и СВ-2 подключаются к сети 6 кВ через два силовых трансформатора ТС1 и ТС2 и масляный выключатель ВМ, установленный в комплектном распределительном устройстве КРУ. Соединение обмоток трансформаторов по схеме / (ТС1), /Y (ТС2) формирует сдвиг питающего напряжения секций на 30 электрических градусов, что обеспечивает 12-пульсную схему выпрямления. Реверсивный возбудитель тиристорный подключается к сети 380 В через встроенный токоограничивающий реактор.
Последовательно с каждой вентильной секцией включены сглаживающие реакторы L1 и L2 для выравнивание токов между секциями и обеспечения высокой надежности в работе, исключая выход из строя силовых элементов (тиристоров и предохранителей силовых блоков).
Выключатель ВМ служит для защиты преобразователя от токов к.з. на стороне переменного тока. Защита силовой цепи постоянного тока от недопустимых перегрузок и к.з. осуществляется с помощью быстродействующего автоматического выключателя ВАТ.1
Электропривод постоянного тока по системе ТП-Д
Для оперативной коммутации силовой цепи на период длительной остановки ЭП или во время работы предохранительного торможения в главной цепи двигателя включены контакты КМ1, КМ2 и КМЗ линейного контактора КЛ.
Система управления ЭП установлена в шкафу регулирования СРПУ. Задающим сигналом является задание скорости ωзад . В СРПУ поступают сигналы обратной связи ωм по частоте вращения ЭД от датчика скорости ДС, токи каждой вентильной секции iсв1 и iсв2, а также ток цепи возбуждения iвб .
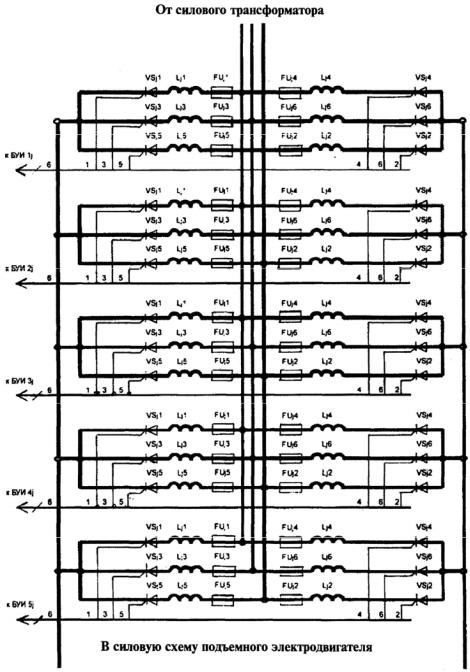
Секция вентильная (СВ) структурно состоит из пяти выпрямительных мостов, собранных по трехфазной мостовой схеме.
Каждый выпрямительный мост подключен к шинам питающего напряжения через разделительные реакторы Lj1...Lj6. Реакторы также выполняют функцию делителей тока для равномерного деления между мостами одной вентильной секции.
Каждый выпрямительный мост выполнен на тиристорах VSj1...VSj6 типа Т753-1000- 2800. Каждый полупроводниковый прибор защищен от токов короткого замыкания быстродействующим предохранителем FUj1...FUj6 типа ПП60М-39У-4391-00. Каждый предохранитель имеет указатель срабатывания и блок свободного контакта. Нормально замкнутые контакты блоков свободных контактов предохранителей соединены последовательно и выведены в шкаф регулирования. Таким образом, система управления имеет информацию о состоянии каждого выпрямительного моста секции вентильной.
Управляющие импульсы на тиристоры секции вентильной формируются с помощью импульсного трансформатора, входящего в блок драйвера тиристора. Блок драйвера тиристора (БДрТ) установлен на каждом полупроводниковом приборе.
Электропривод постоянного тока по системе ТП-Д
Управляющие импульсы на блок драйвера тиристора поступают от блока усиления импульсов БУИ-1, установленного в шкафу регулирования. Один БУИ подает импульсы на 6 блоков драйвера тиристора БДрТ. Т. о., для управления тиристорами пяти мостов вентильной секции используется 5 БУИ.
При выходе из строя предохранителя или тиристора в одном выпрямительном мосту весь мост отключается от управления путем снятия управляющих импульсов. При этом секция вентильная может продолжать работу. При выходе из строя предохранителей или тиристоров в следующем выпрямительном мосту система управления останавливает весь ЭП ШПМ.
Электропривод постоянного тока по системе ТП-Д
Функциональная схема реализована в виде совокупности программных модулей для микропроцессорного контроллера.
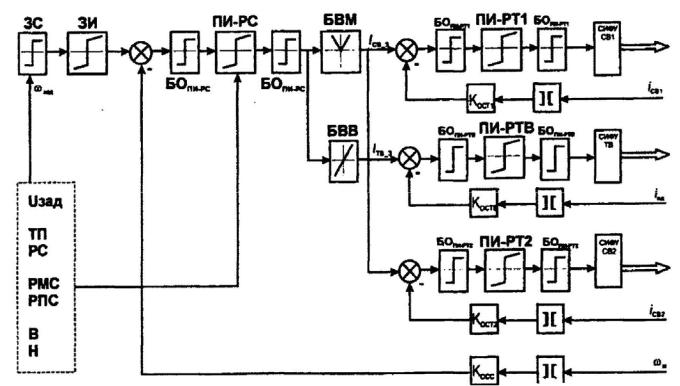
Система регулирования построена по принципу двухконтурной двухканальной системы подчиненного регулирования параметров.
Первый канал – канал регулирования скорости. Внутренним для него является двухканальный контур регулирования тока вентильных секций, выполненный на ПИ регуляторах тока ПИ-РТ1 и ПИ-РТ2. В связи с использованием нереверсивного тиристорного выпрямителя в якорной цепи двигателя на входе регуляторов тока предусмотрен программный модуль выделения модуля БВМ.
Электропривод постоянного тока по системе ТП-Д
С выхода блока БВМ однополярный сигнал задания тока Iсв_з поступает на блоки ограничения тока БОпи_рт1 и БОпи_рт2. Ограниченное задание тока поступает на сумматоры сравнения задания с сигналом обратной связи iсв1 и iсв2 соответственно, после чего сигнал ошибки регулирования поступает на регуляторы тока. Ток каждого из мостов регулируется своим регулятором тока (ПИ-РТ1 и ПИ-РТ2 соответственно).
Для повышения динамических характеристик регуляторы выполнены с переменными коэффициентом усиления и постоянной интегрирования в функции величины сигнала обратной связи. Таким образом, при малых значениях тока регулятор может быть более быстродействующим. Выходы регуляторов тока после блоков ограничения поступают на соответствующие СИФУ СВ1 и СИФУ СВ2.
Внешний регулятор контура регулирования скорости – пропорциональноинтегральный регулятор ПИ-РС также выполнен с переменным коэффициентом усиления и постоянной интегрирования в функции величины сигнала обратной связи. В динамических режимах ЭП шахтного подъема, учитывая наличие гибких связей в механизме, должны исключаться скачки динамического момента двигателя. Для развертки сигнала задания скорости во времени используется задатчик интенсивности ЗИ, с выхода которого задание поступает на регулятор после сравнения с сигналом обратной связи. Этот модуль формирует на начальном и конечном участках ускорения (торможения) параболические участки в заданной тахограмме, что обеспечивает нарастание и спадание динамического тока по линейному закону в течение 1.5...2.5 с.
Сигнал задания скорости формируется фазочувствительным выпрямителем, преобразующим угол поворота сельсинного командоаппарата в аналоговый сигнал Uзад. Знак сигнала задания скорости определяется направлением поворота рукоятки командоаппарата. Далее сигнал задания поступает в задатчик величины скорости ЗС, в котором, в зависимости от сигналов направления (Вперед и Назад) и величины (РПС и РМС) скорости, формируется величина задания скорости, которая поступает на ЗИ.
Электропривод постоянного тока по системе ТП-Д
Второй канал – канал регулирования потока возбуждения.
Реверс момента двигателя производится изменением направления тока возбуждения двигателя. Знак тока возбуждения, а, следовательно, и момента двигателя определяется знаком сигнала на выходе регулятора скорости РС.
Блок величины возбуждения БВВ формирует сигнал задания тока возбуждения Iтв на входе регулятора тока возбуждения ПИ-РТВ.
Если момент нагрузки больше выбранной уставки, то БВВ ограничивает задание тока возбуждения на вход ПИ-РТВ на уровне номинального тока. Если момент меньше выбранной уставки, то задание тока возбуждения на вход ПИ-РТВ уменьшается и поле электродвигателя ослабляется, что необходимо для уменьшения времени реверса момента при малых нагрузках.
В схеме может быть выполнен запрет задания тока якоря на период предохранительного механического торможения подъемной машины обнулением сигнала
Iсв_з.
Все параметры регуляторов, в том числе ограничения, задаются в виде уставок при помощи пульта управления ПУ.
Системы управления приводом ШПУ
сцифровым датчиком регулирования положения по пути
Внекоторых случаях появляется необходимость обеспечить точное стопорение
подъёмного сосуда без дотягивания при любых значениях заданного перемещения h3. Это необходимо, например, в случае оснащения подъёмной установки скипами с автономным
приводом секторного затвора, |
|
|
|
|
ПК |
|
|
|
|
|||
для нормального |
|
|
|
|
|
|
|
|
|
|
||
функционирования которого |
|
h |
|
|
Q2 |
|
|
Д |
Нзад |
|||
нет необходимости в малой |
Uк |
ЦАП |
|
СТ |
||||||||
|
|
|
|
|||||||||
скорости, так как нет кривых. В |
К |
|
|
Q2 |
|
Q1 |
Q1 |
С |
|
|||
|
|
|
|
|
|
|||||||
таких случаях может быть |
|
|
|
|
100 |
П |
|
|
|
|||
применён блок |
|
|
|
|
|
У |
м |
|
ϑд |
|
|
|
позиционирования, |
|
|
|
|
Х |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
позволяющий организовать |
|
|
|
Ку = 1/2а |
|
|
|
|
|
|||
контур регулирования |
|
|
|
|
|
|
|
|
|
h = 0,1 м |
||
положения по пути. |
|
ЗИ |
|
РС |
РТ |
РН |
|
UD |
|
|||
|
|
|
|
|
||||||||
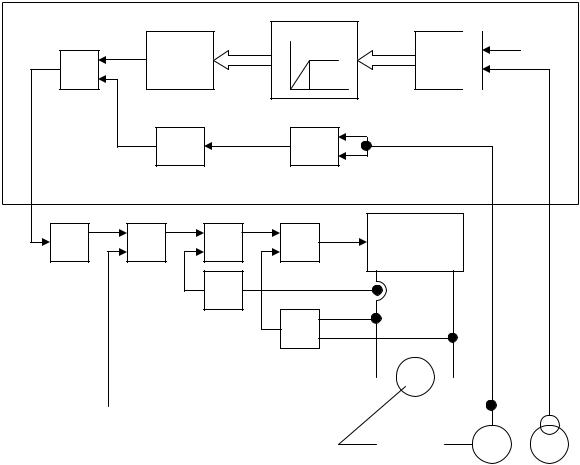
Заданное перемещение h3 вводится |
|
|
|
|
|
|
|
|
||||
в счётчик СТ, работающий на вычитание. |
|
|
ДТ |
|
|
|
|
|
||||
На |
счётный |
вход |
счётчика |
поданы |
|
|
|
ДН |
|
|
|
|
путевые импульсы с квантом h=0.05…0.1 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
м от импульсного |
преобразователя, |
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
находящегося |
на |
валу подъёмной |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
машины. Информация Q1 из счётчика об |
|
|
|
|
|
|
|
|
|
|
|
|
ИП |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
оставшемся |
пути |
перемещение при |
|
|
ПМ |
|
|
|
|
BR |
|
|
|||
|
|
|
|
|
|
||||||||||
помощи преобразователя координат ПK |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Функциональная схема |
|
САУ |
|
приводом ШПУ |
|||||||||||
и ограничивается. |
|
|
|
||||||||||||
|
|
|
с цифровым датчиком положения |
|
|||||||||||
Системы управления приводом ШПУ с цифровым датчиком регулирования положения по пути
При поступлении на вход преобразователя координат кода Q1≥100м на выходе всегда Q2=100 м. При Q1<100м Q2=Q1, то есть он выходит на линейную характеристику.
Код Q2 подаётся на ЦАП, на входе которого получаемый аналоговый сигнал, пропорциональный заданному оставшемуся пути. Этот сигнал подаётся на вход компаратора K, на другой вход которого подается сигнал (vд)2/(2·а), равный действительному пути, чтобы снизить скорость от vд до нуля при заданном замедлении a.
При h>(vд)2/(2·а) на выходе компаратора сигнал пропорционален максимальной скорости: Uk=k·(vk)2. При vk=0 Uk=0. Сигнал Uk подаётся на ЗИ, настроенный на заданное замедление. В начале движения, когда h>100 м, на выходе компаратора устанавливается сигнал, пропорциональный максимальной скорости, который подаётся на ЗИ, продолжается разгон с заданным ускорением. В момент, когда h=100 м, сигнал h на выходе ЦАП начинает уменьшаться и при h=>(vд)2/(2·а) Uk=0. ЗИ уменьшает свой сигнал, что приводит к переброске компаратора в состояние, когда Uk=k·(vmax). Затем ЗИ увеличивает свой сигнал до следующей переброски компаратора. Процесс идёт до тех пор, пока сосуд не придёт в заданную точку.

|
Частотно-регулируемый привод ШПУ |
|
|
|
|||||||||
В последние годы во всём мире наблюдается вытеснение в отраслях промышленности, где применяется |
|||||||||||||
регулируемый ЭП постоянного тока и замены их на двигатели переменного тока: асинхронные, синхронные и вентильные |
|||||||||||||
двигатели. Это объясняется прежде всего, трудностями эксплуатации коллекторов и дефицитом меди. |
|
|
|||||||||||
Кроме того, современные |
а) |
|
|
|
|
|
|
|
|
|
6 кВ |
|
|
тиристорные системы |
|
|
|
|
|
|
|
|
|
|
|
|
|
регулирования скорости |
|
|
|
|
|
|
|
|
|
|
|
|
TV |
двигателей переменного тока |
|
|
|
ЭЧПМ |
|
|
|
|
|
|
|
||
обеспечивают механические |
|
|
|
|
|
|
|
|
|
НПЧ |
|
|
|
характеристики электропривода не |
САР |
|
|
|
|
|
|
iА |
|
|
|
|
|
хуже, чем в системе ТП-Д |
|
|
|
i1q |
|
БЗЧ |
|
|
СИФУ А |
|
|
|
|
|
|
|
|
|
|
РТ-А |
ПЧ-А |
UZ-А |
|
||||
постоянного тока. В качестве |
|
|
|
|
|
|
|
|
|||||
примера рассмотрим |
Vзад |
|
Uзад |
|
|
|
|
|
|
|
|
|
|
систему частотно- |
ЗИ |
|
РС |
i1d |
- |
|
|
iВ |
|
СИФУ В |
|
|
|
регулируемого привода |
|
|
|
РТ-В |
|
ПЧ-В |
UZ-В |
||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||
для ШПУ с асинхронным |
|
|
|
|
|
|
|
|
|
|
|
|
|
двигателем с |
|
|
|
|
|
|
iВ |
|
СИФУ С |
|
|
|
|
короткозамкнутым |
|
|
|
|
|
|
РТ-С |
|
|
ПЧ-С |
|||
|
|
|
|
|
|
|
|
|
|
|
|||
ротором типа ЭЧМП. |
|
|
ГИУ |
|
|
|
|
|
|
|
|
UZ-С |
|
|
|
|
|
f1 |
|
|
|
|
|
|
|||
|
|
|
|
f2 |
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
Σ |
|
|
|
|
|
|
|
|
|
Uω |
|
|
|
|
|
|
|
|
|
|||
|
|
sign f2 |
fω |
|
|
|
f′ω |
|
|
|
|||
|
|
|
f |
|
|
+ |
|
М |
|
||||
|
ПЧС |
|
|
|
|
|
|
ИДС |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
- |
|
|
|
|
|
|
- |
|
|
|
||
|
sign fω |
|
|
|
|
f″ω |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
ПМ |
|
|
Функциональная схема комплектного тиристорного привода ЭЧМП |
|
|
|||||||||||