

13.3. Синтез цифровых систем управления
Наиболее универсальным способом организации цифровых систем управления является применение цифрового регулятора. По сравнению с аналоговым регулятором, цифровой регулятор в состоянии обеспечить гораздо лучшее качество системы управления. Другое преимущество систем с цифровыми регуляторами заключается том, что алгоритм управления легко может быть изменен сменой программы микропроцессора. В аналоговых регуляторах сделать это намного труднее.
Существует множество практических способов реализации цифрового регулятора. При построении цифрового регулятора на основе микроЭВМ необходимо помнить, что ЭВМ присущи такие лимитирующие факторы, как разрядность, объем памяти и скорость счета.
Рассмотрим некоторые аспекты программирования реальной системы на основе микропроцессорного устройства. Возможный вариант использования микропроцессора (МП) в системе управления двигателем постоянного тока в составе комплектного привода показан на рис.13.2.

Рисунок 13.2.- Структура процессорной системы управления приводом
Управляемый привод и микропроцессор связаны через аналого-цифровой (АЦП) и цифроаналоговый (ЦАП) преобразователи. Таким образом, вся система может рассматриваться как цифровая система управления с периодом квантования Т секунд.
Пусть целью управления этой системы с двигателем постоянного тока является поддержание скорости нагрузки w(t) постоянной, равной значению задаваемой скорости wd(t). Тогда ошибка между задаваемой скоростью и скоростью нагрузки определяется как
e(t) = wd(t)-w(t).
На входе микропроцессора имеется дискретный сигнал ошибки е(kТ), k=0,1,2, ..., n. Сигнал на выходе микропроцессора обозначим u(kT). Предположим, что микропроцессор должен совершать цифровые вычисления для реализации пропорционально-интегрального (ПИ) регулятора, описываемого в непрерывной форме как
![]()
Интеграл в последнем выражении может быть записан в виде

где to - начальный момент времени; x(to) - начальное значение.
Для вычисления интеграла могут быть использованы различные методы. Будем использовать метод трапеций и положим t=kT, to=(k-1)t. Тогда определенный интеграл в последнем выражении запишется как

Следовательно, значение интеграла для t=kT может быть вычислено по задаваемой скорости wd и значениям w(kT) и w[(k-1)T]. Рассчитанное значение управления прикладывается к системе с двигателем постоянного тока при t=(k+1)T, k=0,1,2,...n. Управление изменяется каждые Т секунд и остается постоянным между моментами расчета.
Функциональная схема рассмотренной микропроцессорной системы, используемой для реализации цифрового ПИ-регулятора, показана на рис.13.3.
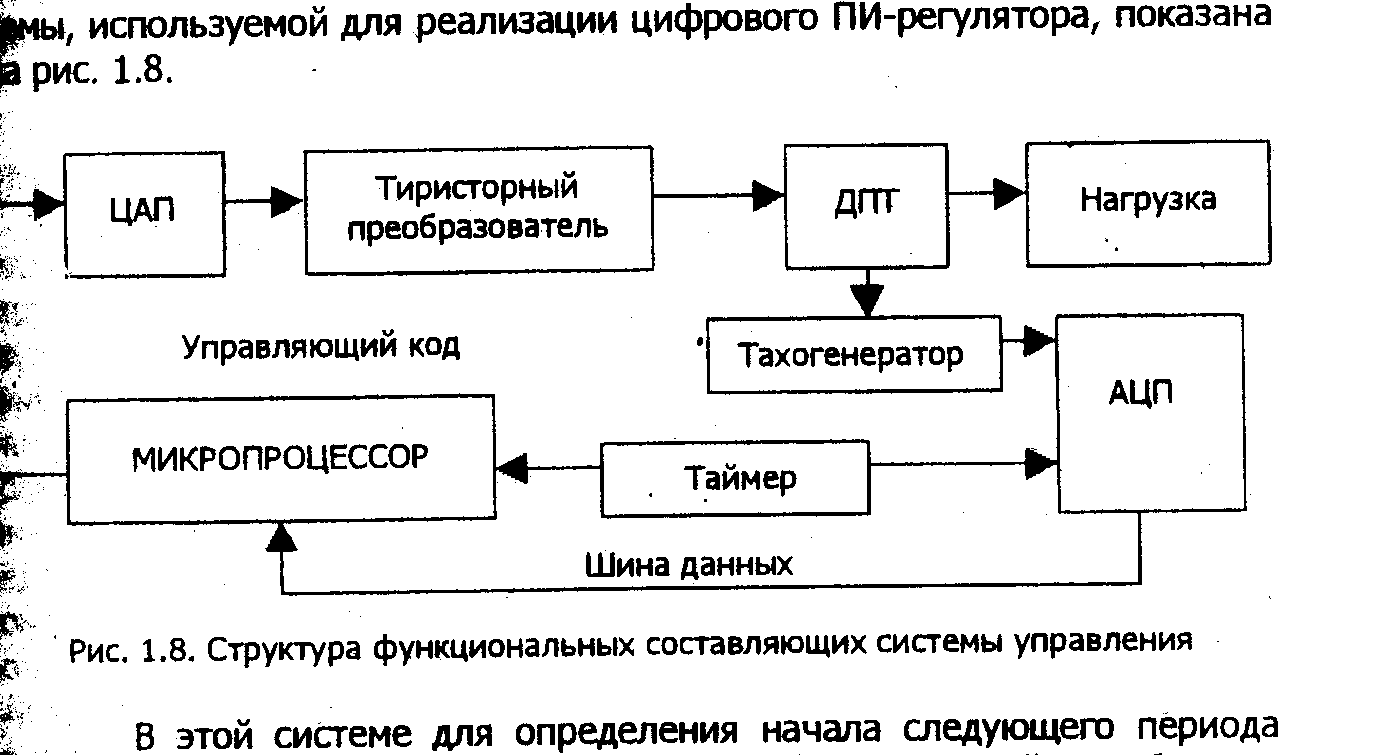

Рисунок 13.3.- Структура функциональных составляющих системы управления
В этой системе для определения начала следующего периода квантования применен программируемый таймер, который вырабатывает импульс каждые Т секунд. Этот импульс поступает на шину прерываний микропроцессора, что приводит к остановке рабочей программы и выполнению программы прерывания, которая выводит следующее значения управления u[(k + l)t]. Это управление передается в ЦАП, выходной сигнал которого поступает на вход тиристорного преобразователя.
Импульс таймера запускает процесс АЦП-преобразования текущей скорости двигателя w(t) в двоичный код. Для этого процесса требуется конечное время. Следовательно, АЦП должен сообщить микропроцессору через шину готовности о том, что данные преобразованы. После этого процессор вводит значение wd(kT) и вычисляет следующее значение управления u[(k+l)T], которое используется для управления приводом при следующем прерывании от таймера. Аналогично может быть реализован ПИД-регулятор.