

Многокоординатные металлорежущие станки с чпу
Мехатронный подход положен в основу создания семейства многокоординатных металлорежущих станков с ЧПУ на базе ограниченного набора унифицированных мехатронных модулей вращательного и линейного перемещений, предназначенных для высококачественной обработки изделий со сложной поверхностью. При разработке таких станков использованы принципы блочно-модульного построения и управления. Предусмотрены возможности измерения текущих параметров деталей и записи управляющих технологических программ по модели изделия.
В качестве примера рассмотрим вертикальный обрабатывающий центр, предназначенный для высокоскоростной механической обработки деталей из различных материалов, имеющих сложную геометрическую форму (пресс-формы, штампы и т.д.), а также тонкостенных деталей сложного профиля.
Обрабатывающий центр выполняет операции сверления, прямолинейного, контурного и объемного фрезерования, растачивания, нарезание резьбы. Благодаря поворотному 2-координатному столу возможна полная обработка заготовки (с пяти сторон) за одну установку, что обеспечивает высокую точность обработки и производительность.
Отсутствие в приводе передаточных звеньев (шкивов, ремней, зубчатых передач) позволяет добиться высокой надежности и долговечности работы обрабатывающего центра.
Цифровое программное управление в комплекте с цифровыми приводами с высокодинамичными серводвигателями, не требующими технического обслуживания, обеспечивает отличные динамические характеристики вертикальных обрабатывающих центров, высокую точность обработки и большую надежность.
Технологические машины – гексаподы
Анализируя типовые кинематические схемы манипуляционных роботов (см. рис.), а также металлорежущих станков, можно отметить присущие им две особенности:
1) оси кинематических пар расположены параллельно либо перпендикулярно друг другу;
2) звенья соединены в последовательную кинематическую цепь.

Рисунок 4.1 .- Схема манипулятора промышленного робота
Здесь явно прослеживается бионический подход, ведь приведенные схемы манипуляторов (особенно антропоморфные структуры типа "PUMA" и "SCARA") аналогичны по кинематике человеческой руке (которая имеет 27 степеней свободы, из них 20 – обеспечиваются кистью). Эти структуры обеспечивают промышленным роботам высокую манипулятивность и большой угол сервиса, вместе с тем они имеют и целый ряд существенных недостатков:
-
низкий показатель грузоподъемность/масса манипулятора, что обусловлено последовательной схемой соединения звеньев. Действительно, каждый привод вынужден перемещать не только полезную нагрузку, но и все последующие по цепи звенья;
-
погрешности в перемещениях всех шарниров суммируются на концевой точке манипулятора, что приводит к низкой точности позиционирования манипуляторов по сравнению с машинами с декартовой компоновкой;
-
относительно низкая жесткость манипуляционных роботов, так как упругое отклонение рабочего органа есть результат накопления деформаций по цепи по всем степеням подвижности робота. Причем весовые коэффициенты этой суммы пропорциональны расстояниям от концевой точки до осей соответствующих шарниров.
Один из новых и эффективных путей преодоления перечисленных недостатков - это создание машин с параллельной кинематикой (МПК). В основе их конструктивной схемы лежит обычно платформа Стюарта. Машина имеет основание и подвижную платформу, соединенные несколькими стержнями управляемой длины (рис.4.2).
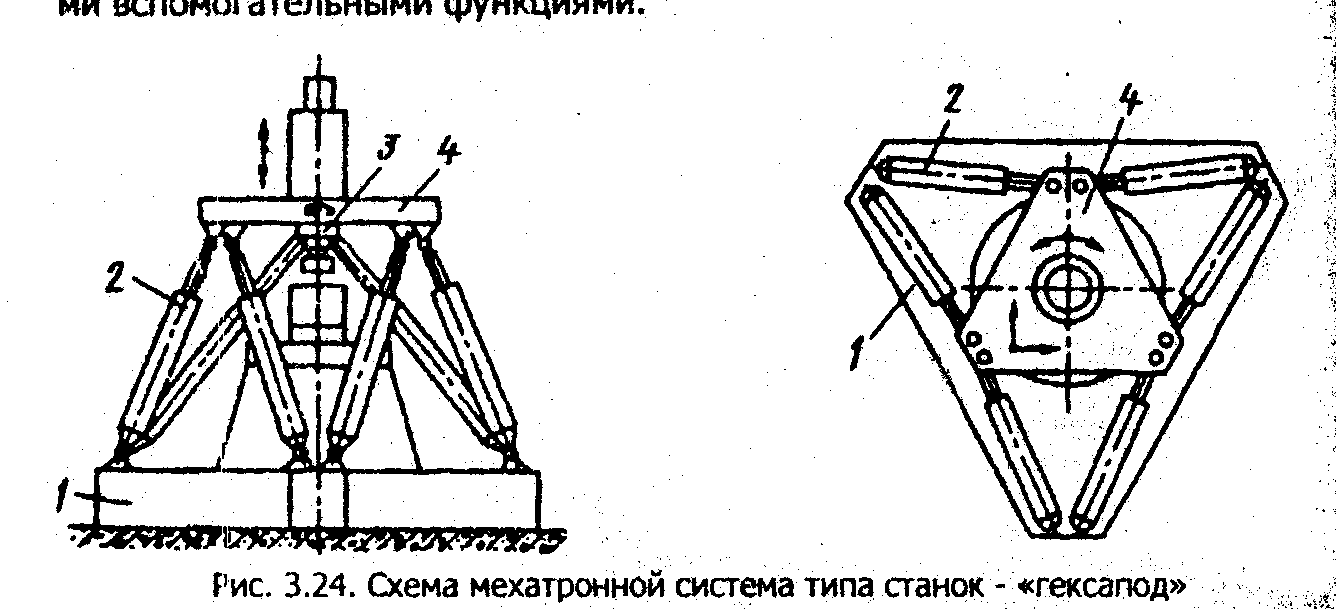
Рисунок 4.2 .- Схема мехатронной системы типа станок-гексапод
Стержни закреплены на концах шарнирами, у которых не менее двух степеней подвижности. На подвижной платформе крепится рабочий орган (например, инструментальная или измерительная головка). Изменяя длины стержней с помощью приводов линейного перемещения, можно управлять перемещениями и ориентацией подвижной платформы, а, следовательно, и жестко связанного с ней рабочего органа.
Для универсальных машин, где требуется управление пространственным перемещением рабочего органа по шести степеням свободы, необходимо соответственно шесть стержней. В мировой литературе такие машины называются "гексаподы" (гекса - шесть). Если управляемых стержней три, то МПК называется трипод (см. рис.).

Рисунок 4.3.- Трипод, сканирующий поверхность сложной формы.
Основными преимуществами машин с параллельной кинематикой являются:
-
высокая точность исполнения движений;
-
высокие скорости и ускорения рабочего органа;
-
отсутствие традиционных направляющих и станины (в качестве несущих элементов конструкции используются приводные механизмы), поэтому улучшенные массогабаритные параметры и низкая материалоемкость;
- высокая степень унификации мехатронных узлов, обеспечивающая технологичность изготовления и сборки машины и конструктивную гибкость.
Повышенные точностные показатели МПК обусловлены следующими ключевыми факторами:
-
здесь не происходит суперпозиции (наложения) погрешностей позиционирования звеньев при переходе от базы к рабочему органу, что выгодно отличает гексаподы от кинематических схем с последовательной цепью звеньев;
-
стержневые механизмы обладают высокой жесткостью, так как при наличии двухстепенных шарниров крепления стержни не подвержены изгибающим моментам и работают только на растяжение-сжатие;
-
применяются прецизионные датчики обратной связи и измерительные системы (например, лазерные), а также используются компьютерные методы коррекции перемещений рабочего органа.
Благодаря повышенной точности МПК могут применяться не только как обрабатывающее оборудование, но и в качестве измерительных машин. Примерами могут служить трипод-сканер для измерения геометрических параметров костей (рис). Полученная цифровая информация о геометрии эталонного образца передается затем в CAD/CAM-систему для автоматического производства его копий. Эта же МПК может выполнять и технологические операции по обработке заготовки.
Высокая жесткость МПК позволяет применять их на силовых технологических операциях, например гибочных для производства сложных профилей и труб.
Следует особенно подчеркнуть, что все МПК построены на мехатронных принципах. Особенности математического обеспечения, программирования и управления этим классом машин обусловлены тем, что их базис исполнения движений (система координат) является косоугольным. Действительно, за обобщенные координаты для МПК обычно принимают длины управляемых стержней (поэтому их иногда называют l - координатами). Тогда координатные оси БИД машины могут пересекаться в общем случае под произвольными углами, образуя косоугольную систему координат. Однако косоугольность и нелинейность координатного базиса машины отнюдь не ведет автоматически к усложнению аналитического решения задач управления и моделирования. В качестве примера рассмотрим обратную задачу о положении, которая состоит в нахождении вектора обобщенных координат механизма для известного положения его концевой точки, заданного в декартовой системе координат.
Для двухзвенного манипулятора по заданным координатам схвата (х,у) требуется найти значения углов поворота звеньев (q1, q2). Решение этой задачи имеет вид

где
![]()
Очевидно, что для манипуляторов сложность нахождения аналитического решения обратной задачи о положении определяется числом степеней подвижности и структурой последовательной кинематической цепи. Например, для шестизвенного робота типа "PUMA" разработано несколько методов (винтовой алгебры, двойственных кватернионов, геометрический подход и др.), причем все они основаны на специальных математических преобразованиях и требуют значительных вычислительных затрат.
Наоборот, для машин с параллельной кинематикой обратная задача о положении решается аналитически просто. Так, для трипода (рис.4.4) при расчете следует задать декартовые координаты трех неподвижных точек основания: А (хА, уА, zA), В (хВ, уВ, zB), D (xD, yD, zD), а также трех точек, определяющих положение подвижной платформы: а (ха, уа, za), b{xb,yb,zb),d(xd,yd,zd).

Рисунок 4.4 .- Расчетная схема для трипода.
Тогда обобщенные координаты механизма (длины стержней) можно найти как расстояния между соответствующими точками:
q1 2 = (хА -ха)2 +(уА -ya)2 +(zA –za)2;
q2 2 = (хв -xb)2 + (ув -yb)2 + (zB -zb)2;
q3 2 =(xD-xd)2 +(yD-yd)2 +(zD-zd)2.
Расчет по данным формулам не представляет собой вычислительных сложностей. Однако следует отметить, что решение прямой задачи о положении для МПК является неординарной аналитической и вычислительной проблемой.
В целом программирование и управление движением машин с параллельной кинематикой (МПК) в реальном масштабе времени стало возможным благодаря появлению мощных компьютеров, имеющих высокую производительность и большие объемы памяти. Мехатронный метод интеграции прецизионной механики с микроэлектронными, вычислительными и сенсорными устройствами делает перспективным создание и внедрение МПК в различных отраслях промышленности. Таким образом, именно мехатронные идеи дали импульс для появления и практического применения машин с параллельной кинематической структурой.