

Нечітке управління
Контроллери нечіткої логіки - найбільш важливий додаток теорії нечітких множин. Їх функціонування небагато відрізняється від роботи звичайних контроллерів; для опису системи використовуються знання експертів замість диференціальних рівнянь. Ці знання можуть бути виражені естесственным| чином за допомогою лінгвістичних змінних, які описуються нечіткими множинами.
Приклад: Перевернений маятник
Проблема полягає в балансуванні вертикальної щогли, рухомо закріпленої нижнім кінцем на візку, який може рухатися тільки в двох напрямах, - вліво або управо.
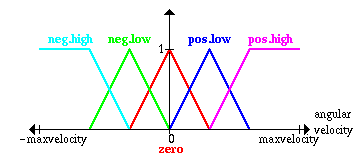
По-перше, ми повинні визначити (суб'єктивно) що таке висока швидкість, низька швидкість і т.п. для візка. Це робиться описом функції приналежності для нечітких множин.
негативна висока, neg.high (блакитною)
негативна низька, neg.low (зелений)
нульова, zero (червоний)
позитивна низька, pos.low (синій)
позитивна висока, pos.high (рожевий)

Теж саме робиться для кута між візком і щоглою маятника і для кутової швидкості зміни цього кута

Будь ласка відмітьте, що для спрощення передбачається, що початкове положення щогли біля центру справа, так що кут більш ніж, скажімо, 45 градусів в будь-якому напрямі за визначенням ніколи не виникне.
Зараз визначимо декілька правив, які визначають що робити в даній ситуації.
Покладемо, наприклад, що щогла знаходиться справа (кут рівний нулю) і не рухається (кутова швидкість - нуль). Очевидно, що це бажане положення, і нічого робити не треба (швидкість рівна нулю).
Розглянемо інший випадок: щогла знаходиться справа, як і раніше, але рухається з низькою швидкістю в позитивному напрямі. Природно необхідно компенсувати рух щогли, пересуваючи візок в тому ж напрямі з низькою швидкістю.
Отже, отримуємо два правила, які формальніше представляються в наступній формі:
Якщо кут рівний нулю І кутова швидкість рівна нулю, тоді швидкість повинна бути рівна нулю.
Якщо кут рівний нулю І кутова швидкість позитивна низька, тоді швидкість повинна бути позитивною низькою.
Зведемо всі отримані правила в таблицю:
|
Швідкість |
Кут | |||||
|
НВ |
НН |
0 |
ПН |
ПВ | ||
|
Кутова швидкість |
НВ |
|
|
НВ |
|
|
|
НН |
|
|
НН |
0 |
| |
|
0 |
НВ |
НН |
0 |
ПН |
ПВ | |
|
ПН |
|
0 |
ПН |
|
| |
|
ПВ |
|
|
ПВ |
|
| |
де НВ| - Негативне Високе (велике) значення, НН - Негативне Низьке (мале) значення, 0 - нуль і т.д.
Для подальших розрахунків визначимо чисельні значення для кута і кутової швидкості. Розглянемо наступну ситуацію:
Реальне значення кута:

Реальне значення кутової швидкості:
Застосуємо правило
Якщо кут рівний нулю І кутова швидкість рівна нулю, тоді швидкість рівна нулю
до реальних значень змінних.

Тут представлена лінгвістична змінна "кут", що відображається нечітким множиною "нуль" і реальний кут нахилу маятника.
Прослідкуємо отримання результату за допомогою нечіткого висновку.
1. Якщо кут рівний нулю І кутова швидкість рівна нулю тоді швидкість рівна нулю

Отримуємо, що реальне значення кута належить нечіткій множині "нуль" із ступенем 0.75.
2. Якщо кут рівний нулю І кутова швидкість рівна нулю тоді швидкість рівна нулю

Реальне значення кута належить нечіткій множині "нуль" із ступенем 0.75.
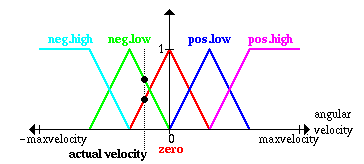
Тут представлена лінгвістична змінна "кутова швидкість", що відображається нечітким множиною "нуль" і реальна кутова швидкість.
3. Якщо кут рівний нулю І кутова швидкість рівна нулю тоді швидкість рівна нулю

Реальне значення кута належить нечіткій множині "нуль" із ступенем 0.75.
Реальне значення кутової швидкості належить нечіткій множині "нуль" із ступенем 0.4.
4. Якщо кут рівний нулю І кутова швидкість рівна нулю тоді швидкість рівна нулю
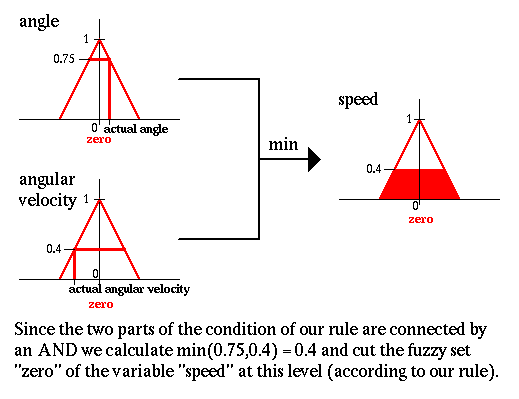
Оскільки дві частини умов правила об'єднуються по І, то обчислюваний min (0.75, 0.4) = 0.4 і зменшуємо нечітку множину "нуль" для змінній "швидкість" до цього рівня (відповідно до даного правила).
Тільки чотири правила приводять до результату. Об'єднаємо їх в одне рішення.
Таким чином результатом правила:
Якщо кут рівний нулю І кутова швидкість рівна нулю тоді швидкість рівна нулю є:

Результатом правила:
Якщо кут рівний нулю І кутова швидкість негативна низька тоді швидкість - негативна низька є:

Результатом правила:
Якщо кут позитивний малий І кутова швидкість рівна нулю тоді швидкість - позитивна низька є:

Результатом правила:
Якщо кут позитивний малий І кутова швидкість негативна низька тоді швидкість рівна нулю є:

Об'єднання цих чотирьох результатів дає загальне рішення:
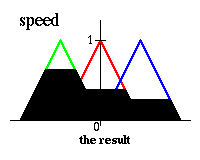
Таким чином, рішенням контроллера нечіткої логіки є нечітка множина (для швидкості). Далі необхідно вибрати одне значення для представлення кінцевого вихідного значення. Існує декілька евристичних методів (методів дефаззификации|), один з яких, наприклад, припускає вибирати як кінцеве значення центр тяжіння нечіткої множини:
Вся дана процедура отримання рішення називається контроллером Мамдані (Mamdani controller).