

Планування в просторі станів
1. Основні поняття теорії графів
Прийняття рішень на основі планування в просторі станів передбачає побудову формалізованої моделі предметної області у вигляді графу станів, вершини якого відповідають можливим ситуаціям (станам), а дуги – операціям, які дозволяють переходити від одного стану до іншого. Також очевидно, що вирішення багатьох інтелектуальних задач пов'язане з діями над графами: орієнтованими і не-орієнтованими, циклічними і ациклічними, навантаженими і ненавантаженими. Часто такі маніпуляції вимагають знаходження вершини (вузла) або множини вершин, ребра або множини ребер, які задовольняють якійсь певній умові. Наприклад, такими умовами можуть бути: знайти множину ребер графу, значення ваг яких менше за задану величину; знайти остове дерево графу; знайти остове дерево мінімальної вартості; знайти компоненти дво-зв'язності графу і т. п.
Визначити такі множини можна лише шляхом систематичної перевірки всіх вершин або ребер заданого графу. Фактично задача зводиться до пошуку в графі. Тому важливою компонентою багатьох алгоритмів на графах є алгоритм пошуку обходу графу. Для будь-яких операцій з графом потрібно початкове його задання в пам'яті ЕОМ. Основними способами задання графу є: матриця інцидентності, матриця суміжності та списки суміжності.
Однією зі структур даних, що найчастіше використовується в пpoгpaмуванні, є лінійні списки. Вони можуть бути задані за допомогою методів; послідовного або зв'язного зберігання. При виборі способу зберігання в конкретному випадку слід враховувати, які операції і в якій кількості виконуватимуться над лінійними списками.
Лінійний список – це скінченна послідовність однотипних елементів. Кількість елементів послідовності називають довжиною списку.
Списки залежно від організації зв'язку між елементами бувають однозвязаними (лінійними), двозв'язними (лінійними), двозв'язними (циклічними) іт.п.
Лінійний список L, що складається з елементів l1,, l2,..., ln записуватимемо у вигляді L = <l1,, l2,..., ln> і зображатимемо графічно, як показано на рис.1.
Рис. 1. Графічне зображення списку
При роботі зі списками найчастіше використовуються такі операції: знайти елемент в списку із заданою характеристикою, вилучити певний елемент зі списку, внести елемент у спеціально визначене місце списку, виконати певні дії над елементами списку. В більшості мов програмування, за винятком мов, подібних до Ліспу або Прологу, не існує стандартних механізмів для задання лінійних списків.
Можна виокремити два основні методи задання лінійних списків: послідовне і зв'язне зберігання. Перше в більшості випадків реалізується за допомогою масивів, а друге – за допомогою динамічних змінних. При виборі засобів зберігання списку слід враховувати, які операції і з якою послідовністю виконуватимуться над ними. При використанні списку як базової структури для побудови складніших структур даних, а також для економії пам'яті, використовується зв'язне зберігання лінійних списків з використанням динамічних змінних. Якщо ми організовуємо видалення та вставку елементів у список спеціальним чином, то отримуємо загальноприйняті в програмуванні структури даних типу стек, черга і т. п.
Стеком називається спеціально організований список, в якому занесення і видалення елементів можна проводити тільки через один початковий елемент, який називають вершиною стека.
Стек працює за принципом "останній зайшов — перший вийшов" (Last In First Out). Тому стек ще називають списком типу LIFO.
Чергою називають список, в якому всі вставки здійснюються в кінець списку (позначатимемо змінною rear), а всі видалення відбуваються з "голови" (початку) списку (позначатимемо змінною front).
Ці операції виконуються за принципом "перший зайшов — перший вийшов" (First In First Out), тому чергу ще називають списком типу FIFO.
При вирішенні конкретних задач можуть виникати й інші різновиди зв'язного зберігання.
Поняття граф вперше ввів до розгляду знаменитий математик Ейдер в 1736р. Граф G містить дві множини G = (V, Е), де V - множина вершин, Е — множина ребер. V є скінченною непустою множиною вершин (іноді їх називають вузлами), традиційно пронумерованою 1, 2, ..,; n Е – скінченна множина пар вершин. Кожна пара із Е є ребром у G. Коди пари впорядковані, тоді графи називаються орієнтованими, в іншому випадку – неорієнтованими. Впорядковане ребро позначатимемо < i,j> а невпорядковане – (i,j).
У більшості випадків застосувань з множиною ребер графу пов'язують множину дійсних чисел, які називають вагами. Такий граф називають зваженим.
У неорієнтованому графі говоримо, що вершина i суміжна вершині j, коли існує ребро (i,j). Ступенем вершини назвемо число суміжних їй вершин. В орієнтованому графі виділяють півстепінь входу (число вхідних) та півстепінь виходу (число вихідних ребер з вершини).
Шляхом з вершини vp до вершини vq є послідовність вершин vp, vi1, vi2,..., vin, vq, така що (vp, vi1), (vi1, vi2),…, (vin, vq) є ребрами в Е (G). Довжиною шляху називають число ребер, які належать шляху. Простим шляхом називають шлях, в якому всі вершини, за винятком першої та останньої, є різними.
Циклом називають простий шлях, в якому перша та остання вершини збігаються. На рис.2 маємо орієнтований і неорієнтований графи з 6 вершинами і 6 ребрами.
Неорієнтований граф називають зв'язним, коли для довільної пари вершин існує шлях між ними.
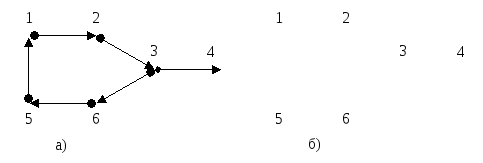
Рис. 2. Зображення графу: а) орієнтованого; б) неорієнтованого