

3.4. Преобразование чертежа способом замены плоскостей проекций.
Приведение прямых линий и плоских фигур в частные положения относительно плоскостей проекций в ходе решения задач нередко приводит к его значительному упрощению.
Способ замены плоскостей проекций заключается в том, что одна из основных плоскостей проекций (П1 , П2)заменяется дополнительной плоскостью проекций, подходящим образом расположенной относительно оригинала, но перпендикулярно остающейся плоскости проекций. При этом оригинал в новой системе плоскостей будет занимать частное положение.
3.4.1. Преобразование прямой.
Используя способ замены плоскостей проекции, прямую общего положения АВможно преобразовать в прямую уровня или прямую проецирующую (рис. 3.26).
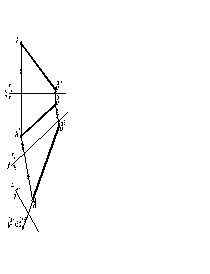
Рис.3.26
Если выбрать дополнительную плоскость проекций П3 параллельно прямой АВ, тогда прямая станет прямой уровня в системе П1/П3 , что позволит найти натуральную величину отрезка прямой. Выполним еще одно преобразование перпендикулярно к прямой АВ с дополнительной плоскостью П4. Прямая АВ станет проецирующей в системе П3/П4.
3.4.2. Преобразование плоскости
Плоскость общего
положения α(ABC)можно преобразовать в проецирующую,
если выбрать дополнительную плоскостьП3
перпендикулярно к любой
прямой, принадлежащей плоскостиα.
В качестве такой прямой выбирают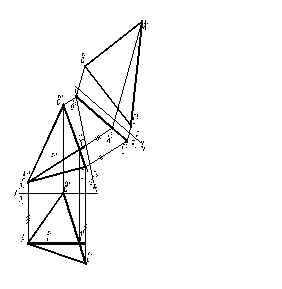
Рис.3.27
линию уровня плоскости (фронталь или горизонталь). Пусть П3 f (x1 f”), следовательно, и вся плоскостьαбудет перпендикулярной кП3 (рис. 3.27).
Если выбрать дополнительную плоскость П4 параллельно проецирующей плоскостиα, то можно получить натуральный вид плоской фигуры, лежащей в плоскостиα.
4. Последовательность выполнения домашней графической работы.
По заданным
графическим изображениям поверхности
и плоскости общего положения строят
проекции поверхности и плоскости,
увеличивая их изображения в два раза
(рис. 4.1):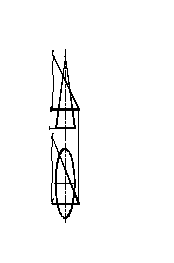
Работа выполняется в четыре этапа:
А. На первом этапеметодом замены плоскостей проекций преобразуем плоскость общего положения, заданную двумя пересекающимися прямыми, в проецирующую плоскость.
Обычно плоскость общего положения задается, либо пересекающимися горизонталью (h) и фронталью (f), либо пересекающимися произвольной прямой общего положения (a) и горизонталью (h) или фронталью (f). Чтобы преобразовать плоскость общего положения в проецирующую за одну замену, необходимо провести преобразования относительно либо горизонтали, либо – фронтали (см. п.3.4.2).
Последовательность выполнения преобразований следующая (см. рис. 4.2):
Обозначаем исходную систему координат – ось ОХ
(между горизонтальной и фронтальной проекциями заданных поверхности и плоскости) и плоскости проекций П1иП2.Положение оси регулируем с целью уменьшения построений.
Новую ось ОХ1проводим перпендикулярно либо горизонтальной
проекции горизонтали (h'), либо – фронтальной проекции фронтали (f”). Обязательно нужно учитывать, что после замены плоскостей проекций,поверхность не должна поменять своего положения в пространстве. Например, если ось вращения конуса была перпендикулярнаП1, то и после замены в новой системе плоскостей она должна остаться П1. Следовательно, осьОХ должна задаватьсяhи новая система плоскостей будетП1/П3. Исключение составляет сфера, у которой нет такого требования.
3. На прямой общего положения (а) или фронтали (f) берем произвольную точкуК, которая позволит перенести эту прямую в новую систему координатОХ1,П1/П3.
4. Проводим линии связи от фронтальной проекции точки К (К”),центра поверхности и фронтальной проекции точки пересечения прямых, образующих плоскость, перпендикулярно осиОХ1.
5. На продолжении линий связи относительно оси ОХ1для точекК, центра поверхности и точки пересечения прямых плоскости откладываем значения координатZ для каждой из этих точек, взятые из исходной системы координатОХ,П1/ П2.
6. Соединив полученные точки К’” и точку пересечения прямых для плоскости, получим в новой системе координатОХ1,П1/ П3, положение секущей плоскости в виде проецирующей.
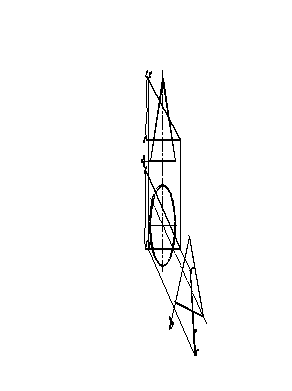
Рис. 4.2
7. Для того, чтобы перенести поверхность в новую систему координат, необходимо использовать координату Zпо высоте поверхности и координатыZточек, определяющих ее ширину.
8. В результате преобразований мы перешли в новую систему координат ОХ1,П1/ П3, в которой заданная плоскость общего положения стала проецирующей (рис. 4.2).
Б. На втором этапепроводят построения проекций сечения
заданной поверхности проецирующей плоскостью в системе координат ОХ1,П1/П3 (рис. 4.3). В зависимости от вида заданной поверхности и положения секущей плоскости могут быть получены различные виды сечений (см. п. 3.3.1.1, п. 3.3.2.1, п. 3.3.3.1). Последовательность построения сечений подробно представлена в разделах п. 3.3.1.1.1, п. 3.3.1.1.2, п. 3.3.1.1.3, а также в разделах п. 3.3.2.1, п.3.3.3.1.
На этом же этапе выполняют построение натуральной величины сечения, для чего также, используют метод замены плоскостей проекций
(
рис 4.3). Новую ось ОХ2проводят параллельно положению следа
секущей плоскости в системе координатОХ1 ,П1/
П3.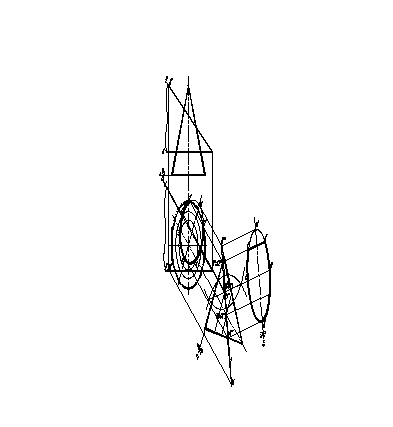
Рис. 4.3
Из каждой точки сечения проводят линии связи перпендикулярно оси ОХ2, на которых откладывают, по обе стороны от осиОХ2(вследствие симметричности сечения), значения координат точек относительно центральной оси горизонтальной проекции сечения, снятые в системе координатОХ1 ,П1 / П3.
В. На третьем этапе выполняют построения проекций сечения в исходной системе координатОХП1 / П2. При выполнении построений в системе координатОХ1 П1 / П3была получена горизонтальная проекция сечения. Остается построить фронтальную проекцию сечения в исходной системе координат.
Работа выполняется в следующей последовательности:
- необходимо провести из всех точек сечения (их горизонтальных проекций) линии связи перпендикулярно оси ОХ(рис. 4.4);
- обязательно необходимо определить точки, определяющие видимость сечения (К, L) . Эти точки располагаются на пересечении горизонтальной проекции линии сечения и горизонтальной проекции очерковых образующих (горизонтальная ось);
- на продолжении линий связи относительно оси ОХоткладываем значения координатOZ для каждой точки сечения, взятые в системе координатОХ1 П1 / П3;
- соединяем значения точек АиВосевой линией (большая ось эллипса) и значения точекCиD(малая ось эллипса) (лишь в том случае, если сечением данной поверхности будет эллипс);
- выполняется коррекция положения большой и малой осей эллипса (только в том случае, если сечение данной поверхности – эллипс). Методика проведения коррекции положения большой и малой осей эллипса представлена в рабочей тетради (см. рабочая тетрадь стр. 54).
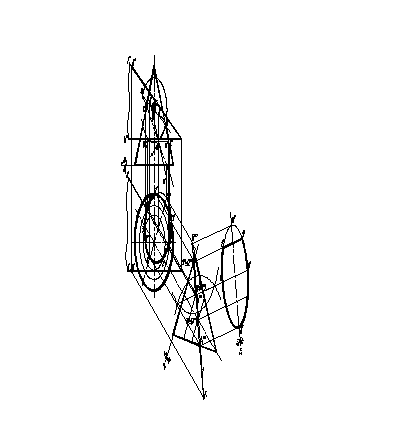
Рис. 4.4
Г. На четвертом этапеполученные значения всех точек сечения соединяем плавной кривой с учетом их видимости (рис. 4.5). Также определяем видимость секущей плоскости и заданной поверхности.
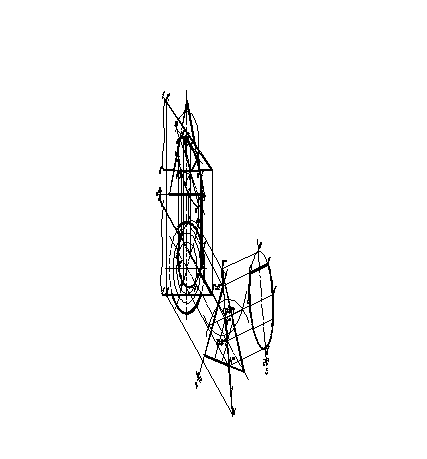
Рис. 4.5